- Схемы автоматического управления пуском и торможением двигателей постоянного тока
- Управление двигателем постоянного тока
- Управление двигателем при помощи биполярного транзистора
- Несколько слов об индуктивных нагрузках
- Управление двигателем при помощи MOSFET транзистора
- Управление двигателем при помощи реле
- Управление двигателем при помощи H-моста
- Управление шаговым двигателем
Схемы автоматического управления пуском и торможением двигателей постоянного тока
 Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Процесс торможения двигателей также может быть автоматизирован. После команды на торможение с помощью релейно-контакторной аппаратуры осуществляются необходимые переключения в силовых цепях. При подходе к скорости, близкой к нулю, двигатель отключается от сети. В процессе пуска выключение ступеней происходит через определенные интервалы времени либо в зависимости от других параметров. При этом изменяются ток и скорость двигателя.
Управление пуском двигателя осуществляется в функции ЭДС (или скорости), тока, времени и пути.
Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока
Пуск двигателя постоянного тока параллельного или независимого возбуждения осуществляется с резистором, введенным в цепь якоря. Резистор необходим для ограничения пускового тока. По мере разгона двигателя пусковой резистор по ступеням выводится. Когда пуск закончится, резистор будет полностью зашунтирован, и двигатель перейдет работать на естественную механическую характеристику (рис. 1). При пуске двигатель разгоняется по искусственной характеристике 1, затем 2, а после шунтирования резистора — по естественной характеристике 3.
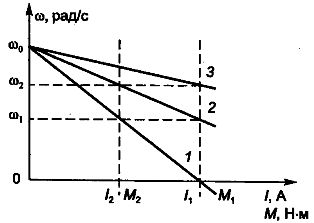
Рис. 1. Механические и электромеханические характеристики двигателя постоянного тока параллельного возбуждения (ω — угловая скорость вращения; I1 М1 — пиковый ток и момент двигателя; I2 М2 — ток и момент переключения)
Рассмотрим узел схемы пуска двигателя постоянного тока (ДПТ) в функции ЭДС (рис. 2).
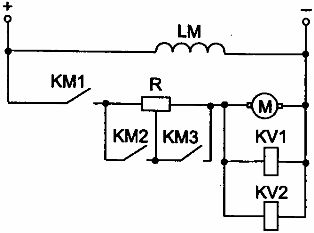
Рис. 2. Узел схемы пуска ДПТ параллельного возбуждения в функции ЭДС
Управление в функции ЭДС (или скорости) осуществляется реле, напряжения и контакторами. Реле напряжения настроены на срабатывание при различных значениях ЭДС якоря. При включении контактора КМ1 напряжение на реле KV в момент пуска недостаточно для срабатывания. По мере разгона двигателя (вследствие роста ЭДС двигателя) срабатывает реле KV1, затем KV2 (напряжения срабатывания реле имеют соответствующие значения); они включают контакторы ускорения КМ2, КМЗ, и резисторы в цепи якоря шунтируются (цепи включения контакторов на схеме не показаны; LM — обмотка возбуждения).
Рассмотрим схему пуска двигателя постоянного тока в функции ЭДС (рис. 3). Угловая скорость двигателя часто фиксируется косвенным путем, т.е. измерением величин, связанных со скоростью. Для двигателя постоянного тока такой величиной является ЭДС. Пуск осуществляется следующим образом. Включается автоматический выключатель QF, обмотка возбуждения двигателя подключается к источнику питания. Срабатывает реле КА и замыкает свой контакт.
Остальные аппараты схемы остаются в исходном положении. Для пуска двигателя необходимо нажать кнопку SB1 «Пуск», после чего контактор КМ1 срабатывает и подключает двигатель к источнику питания. Контактор КМ1 становится на самопитание. Двигатель постоянного тока разгоняется с резистором R цепи якоря двигателя.
По мере увеличения скорости двигателя растет его ЭДС и напряжение на катушках реле KV1 и KV2. При скорости ω1 (см. рис. 1.) срабатывает реле KV1. Оно замыкает свой контакт в цепи контактора КМ2, который срабатывает и закорачивает своим контактом первую ступень пускового резистора. При скорости ω2 срабатывает реле KV2. Своим контактом оно замыкает цепь питания контактора КМЗ, который, срабатывая, контактом закорачивает вторую пусковую ступень пускового резистора. Двигатель выходит на естественную механическую характеристику и заканчивает разбег.
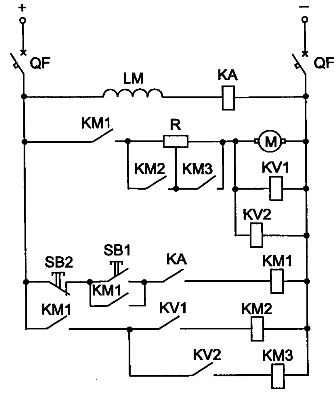
Рис. 3. Схема пуска ДПТ параллельного возбуждения в функции ЭДС
Для правильной работы схемы необходимо настроить реле напряжения KV1 на срабатывание при ЭДС, соответствующей скорости ω1, и реле KV2 на срабатывание при скорости ω2.
Для остановки двигателя следует нажать кнопку SB2 «Стоп». Для обесточивания схемы нужно отключить автоматический выключатель QF.
Управление в функции тока осуществляется с помощью реле тока. Рассмотрим узел схемы пуска двигателя постоянного тока в функции тока. В схеме, приведенной на рис. 4, применяются реле максимального тока, которые срабатывают при пусковом токе I1 и отпадают при минимальном токе I2 (см. рис. 1). Собственное время срабатывания токовых реле должно быть меньше собственного времени срабатывания контактора.
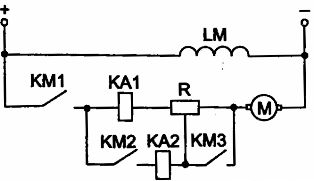
Рис. 4. Узел схемы пуска ДПТ параллельного возбуждения в функции тока
Разгон двигателя начинается при резисторе, полностью введенном в цепь якоря. По мере разгона двигателя ток уменьшается, при токе I2 реле КА1 отпадает и своим контактом замыкает цепь питания контактора КМ2, который своим контактом шунтирует первую пусковую ступень резистора. Аналогично осуществляется закорачивание второй пусковой ступени резистора (реле КА2, контактор КМЗ). Цепи питания контакторов на схеме не показаны. По окончании пуска двигателя резистор в цепи якоря будет зашунтирован.
Рассмотрим схему пуска двигателя постоянного тока в функции тока (рис. 5). Сопротивления ступеней резистора выбираются таким образом, чтобы в момент включения двигателя и шунтирования ступеней ток I1 в цепи якоря и момент М1 не превосходили допустимого уровня.
Пуск двигателя постоянного тока осуществляется включением автоматического выключателя QF и нажатием кнопки SB1 «Пуск». При этом срабатывает контактор КМ1 и замыкает свои контакты. По силовой цепи двигателя проходит пусковой ток I1, под действием которого срабатывает реле максимального тока КА1. Его контакт размыкается, и контактор КМ2 не получает питания.
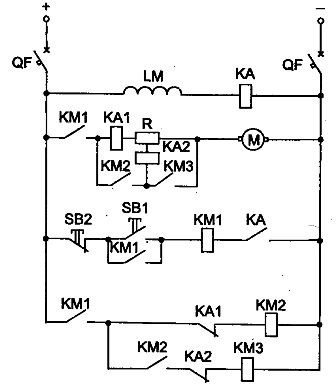
Рис. 5. Схема пуска ДПТ параллельного возбуждения в функции тока
Когда ток уменьшается до минимального значения I2, реле максимального тока КА1 отпадает и замыкает свой контакт. Срабатывает контактор КМ2 и своим главным контактом шунтирует первую секцию пускового резистора и реле КА1. При переключении ток возрастает до значения I1.
При повторном увеличении тока до значения I1 контактор КМ1 не включается, поскольку его катушка зашунтирована контактом КМ2. Под действием тока I1 реле КА2 срабатывает и размыкает свой контакт. Когда в процессе ускорения ток вновь уменьшается до значения I2, реле КА2 отпадает и включается контактор КМЗ. Пуск заканчивается, двигатель работает на естественной механической характеристике.
Для правильной работы схемы необходимо, чтобы время срабатывания реле КА1 и КА2 было меньше времени срабатывания контакторов. Чтобы остановить двигатель, необходимо нажать кнопку SB2 «Стоп» и выключить автоматический выключатель QF для обесточивания схемы.
Управление в функции времени осуществляется с помощью реле времени и соответствующих контакторов, которые своими контактами закорачивают ступени резистора.
Рассмотрим узел схемы пуска двигателя постоянного тока в функции времени (рис. 6). Реле времени КТ срабатывает сразу при появлении напряжения в схеме управления через размыкающий контакт КМ1. После размыкания контакта КМ1 реле времени КТ теряет питание и с выдержкой времени замыкает свой контакт. Контактор КМ2 через промежуток времени, равный выдержке реле времени, получает питание, замыкает свой контакт и шунтирует сопротивление в цепи якоря.
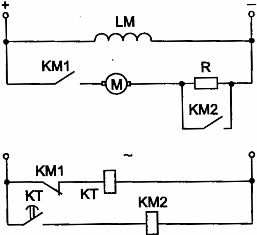
Рис. 6. Узел схемы пуска ДПТ параллельного возбуждения в функции времени
К достоинствам управления в функции времени относятся простота управления, стабильность процесса разгона и торможения, отсутствие задержки электропривода на промежуточных скоростях.
Рассмотрим схему пуска двигателя постоянного тока параллельного возбуждения в функции времени. На рис. 7 приведена схема нереверсивного пуска двигателя постоянного тока параллельного возбуждения. Пуск происходит в две ступени. В схеме используются кнопки SB1 «Пуск» и SB2 «Стоп», контакторы КМ1. КМЗ, электромагнитные реле времени КТ1, КТ2. Включается автоматический выключатель QF. При этом катушка реле времени КТ1 получает питание и размыкает свой контакт в цепи контактора КМ2, Пуск двигателя осуществляется нажатием кнопки SB1 «Пуск». Контактор КМ1 получает питание и своим главным контактом подключает двигатель к источнику питания с резистором в цепи якоря.
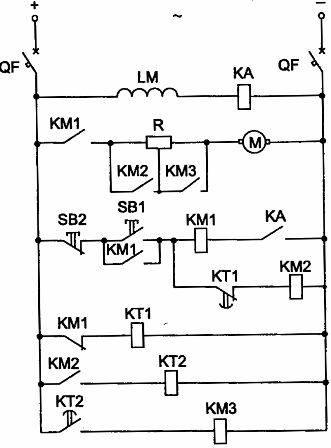
Рис. 7. Схема нереверсивного пуска ДПТ в функции времени
Реле минимального тока КА служит для защиты двигателя от обрыва цепи возбуждения. При нормальной работе реле КА срабатывает и его контакт в цепи контактора КМ1 замыкается, подготавливая контактор КМ1 к работе. При обрыве цепи возбуждения реле КА обесточивается, размыкает свой контакт, затем обесточивается контактор КМ1 и двигатель останавливается. При срабатывании контактора КМ1 замыкается его блокировочный контакт и размыкается контакт КМ1 в цепи реле КТ1, которое обесточивается и замыкает свой контакт с выдержкой времени.
Через промежуток времени, равный выдержке времени реле КТ1, замыкается цепь питания контактора ускорения КМ2, который срабатывает и своим главным контактом закорачивает одну ступень пускового резистора. Одновременно получает питание реле времени КТ2. Двигатель разгоняется. Через промежуток времени, равный выдержке времени реле КТ2, контакт КТ2 замыкается, контактор ускорения КМЗ срабатывает и своим главным контактом закорачивает вторую ступень пускового резистора в цепи якоря. Пуск заканчивается, и двигатель переходит работать на естественную механическую характеристику.
Типовые узлы схем управления торможением двигателей постоянного тока
В системах автоматического управления двигателем постоянного тока применяется динамическое торможение, торможение противовключением и рекуперативное торможение.
При динамическом торможении необходимо обмотку якоря двигателя замкнуть на добавочное сопротивление, а обмотку возбуждения оставить под напряжением. Такое торможение можно осуществить в функции скорости и в функции времени.
Управление в функции скорости (ЭДС) при динамическом торможении можно выполнить по схеме, приведенной на рис. 8. При отключении контактора КМ1 якорь двигателя отключается от сети, но на его зажимах в момент отключения имеется напряжение. Реле напряжения KV срабатывает и замыкает свой контакт в цепи контактора КМ2, который своим контактом замыкает якорь двигателя на резистор R.
При скорости, близкой к нулю, реле KV теряет питание. Дальнейшее торможение от минимальной скорости до полной остановки происходит под действием статического момента сопротивления. Для увеличения эффективности торможения можно применить две или три ступени торможения.
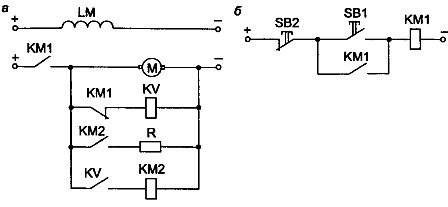
Рис. 8. Узел схемы автоматического управления динамическим торможением в функции ЭДС: а — силовая цепь; б — цепь управления
Динамическое торможение двигателя постоянного тока независимого возбуждения в функции времени осуществляется по схеме, приведенной на рис. 9.
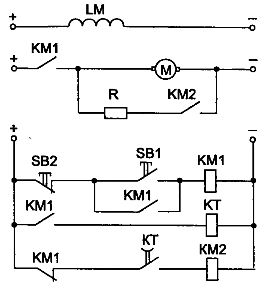
Рис. 9. Узел схемы динамического торможения ДПТ независимого возбуждения в функции времени
При работе двигателя реле времени КТ включено, но цепь контактора торможения КМ2 разомкнута. Для торможения необходимо нажать кнопку SB2 «Стоп». Контактор КМ1 и реле времени КТ теряют питание; срабатывает контактор КМ2, так как контакт КМ1 в цепи контактора КМ2 замыкается, а контакт реле времени КТ размыкается с выдержкой времени.
На время выдержки реле времени контактор КМ2 получает питание, замыкает свой контакт и подключает якорь двигателя к добавочному резистору R. Осуществляется динамическое торможение двигателя. В конце его реле КТ после выдержки времени размыкает свой контакт и отключает контактор КМ2 от сети. Дальнейшее торможение до полной остановки осуществляется под действием момента сопротивления Мс.
При торможении противовключением ЭДС двигателя и напряжение сети действуют согласно. Для ограничения тока в силовую цепь вводится резистор.
Управление возбуждением электродвигателей постоянного тока
Обмотка возбуждения двигателя обладает значительной индуктивностью, и при быстром отключении двигателя на ней может возникнуть большое напряжение, что приведет к пробою изоляции обмотки. Для предотвращения этого можно использовать узлы схем, приведенные на рис. 10. Сопротивление гашения включается параллельно обмотке возбуждения через диод (рис. 10 ,б). Следовательно, после отключения ток через сопротивление проходит кратковременно (рис. 10, а).

Рис. 10. Узлы схем включения сопротивлений гашения: а — сопротивление гашения включается параллельно; б — сопротивление гашения включается через диод.
Защита от обрыва цепи возбуждения осуществляется с помощью реле минимального тока по схеме, показанной на рис. 11.

Рис. 11. Защита от обрыва цепи возбуждения: а — силовая цепь возбуждения; б— цепь управления
При обрыве обмотки возбуждения реле КА теряет питание и отключает цепь контактора КМ.
Управление двигателем постоянного тока
Чтобы двигатель постоянного тока начал вращаться, ему необходимо обеспечить нужное количество энергии. Как правило, для маломощных двигателей достаточно несколько ватт. Блок управления (микроконтроллер), который принимает решения о запуске двигателя, не может непосредственно управлять двигателем, то есть обеспечить необходимую мощность со своего вывода. Это связано с тем, что порты микроконтроллера имеют очень ограниченную нагрузочную способность (максимальный ток на выходе микроконтроллера обычно не более 20 мА).
Поэтому нужен усилитель мощности — устройство, которое может на своем выходе генерировать сигнал мощностью большей, чем мощность на его входе. Такими устройствами являются транзистор и реле, которые прекрасно подходят для управления двигателем постоянного тока.
Управление двигателем при помощи биполярного транзистора
Самый простой способ приведения в действие двигателя показан ниже:

Биполярный транзистор используется в качестве переключателя. Резистор R необходимо подобрать таким, чтобы в худшем случае (потенциал базы равен потенциалу эмиттера) через него протекал ток, не превышающий максимальный ток порта микроконтроллера.

Для того чтобы подобрать подходящий транзистор, нам нужно знать максимальный ток во время пуска или остановки двигателя, и ток во время нормальной его работы. Исходя из этого, мы подберем транзистор с соответствующим током коллектора и его максимальное значение.
Следует также обратить внимание на мощность, выделяющуюся на транзисторе (P = Uкэ * Iк). Несмотря на то, что транзистор в данном случае работает в состоянии насыщения и напряжение Uкэ часто не превышает 1В, коллекторный ток все же велик (около 0,5 А для двигателя среднего размера) и, следовательно, мощность, излучаемая на транзисторе может потребовать от нас установки радиатора.
Другой проблемой при применении биполярных транзисторов, может быть, слишком большой ток базы. Соотношение токов выходного сигнала к входному такого транзистора — это чаще всего 100 (это отношение называется коэффициентом усиления по току и обозначается или hfe ). Но, к сожалению, когда транзистор работает в состоянии насыщения, этот коэффициент сильно снижается.
Это приводит к тому, что если мы хотим, чтобы ток коллектора имел большое значение, это может потребовать большего тока, чем 20 мА, то есть больше, чем составляет нагрузочная способность порта микроконтроллера. В таких случаях решением может быть использование комбинации транзисторов – транзистор Дарлингтона:

Такая система ведет себя как один транзистор с большим значением усиления тока и малой скоростью работы.
Несколько слов об индуктивных нагрузках
Поскольку двигатель является индуктивной нагрузкой, мы должны быть осторожны. Если через обмотку течет ток, и мы внезапно остановим этот поток, то на выводах обмотки временно появляется большое напряжение. Это напряжение может привести к повреждению транзистора (в представленной схеме выше) вызывая пробой перехода база-коллектор. Кроме того, это может создавать значительные помехи. Для предотвращения этого необходимо параллельно с индуктивной нагрузкой подключить диод:

Во время нормальной работы двигателя диод смещен в обратном направлении. Отключение питания электродвигателя вызывает нарастание напряжения на катушке, при этом диод будет смещен в прямом направлении, благодаря чему произойдет разряд излишней энергии накопленной в катушке.
Диод следует подобрать такой, чтобы он выдерживал обратное напряжение во время нормальной работы двигателя. Такую защиту можно применять как при использовании биполярных транзисторов, так и MOSFET. Так же рекомендуется использовать диод и в работе с электромагнитным реле, для предотвращения раннего износа контактов.
Управление двигателем при помощи MOSFET транзистора
Так же можно управлять постоянным двигателем с помощью полевого транзистора MOSFET:

Он должен быть с каналом обогащенного типа. Основным преимуществом такого транзистора является практически отсутствие входного тока. Он имеет небольшое активное сопротивление канала (доли ома), благодаря чему потери мощности в транзисторе не большие. Недостатком является чувствительность к электростатическим разрядам, которые могут вывести транзистор из строя.
Так как ток стока может достигать (для среднего транзистора) десятков ампер и, имея практически нулевой входной ток, MOSFET транзисторы отлично подходят в качестве усилителя мощности и часто являются лучшей альтернативой, чем биполярные. Они так же должны быть защищены диодами от индуктивных всплесков, так как это может привести к пробою между затвором и каналом (напряжение пробоя составляет несколько десятков вольт).
Управление двигателем при помощи реле
Если вам необходимо управление двигателем постоянного тока, и вы знаете, что частота переключения не будет слишком большая (ниже 20 Гц), то вы можете для коммутации использовать реле (реле не подходят для управления ШИМ). Преимуществом такого решения является, прежде всего, малое выделение тепла.
Существуют малогабаритные реле способные управлять токами до 10 А ! Для таких больших токов, потери мощности в реле являются приемлемыми, но для небольших токов хуже. Катушка управления контактами реле можно работать даже от нескольких сотен мА. Так что нет никакого смысла в использовании такого реле для управления током подобной величины. К счастью, есть отдельные экземпляры, которые потребляют ток около 40 мА и это уже гораздо лучше.
Если речь идет о напряжении управления реле, то оно бывает от 3 до 24 В. Как мы уже писали ранее, максимальный выходной ток микроконтроллера 20 мА, а это слишком мало, чтобы управлять реле напрямую. Поэтому для управления необходимо использовать транзистор. Схема такого подключения, как правило, выглядит следующим образом:

Так и так, нам нужен транзистор. Следует, отметить, что в данном случае выделяется гораздо меньше тепла, чем на схеме, основанной только на транзисторе, так как через транзисторный ключ в этой системе течет небольшой ток, а само реле почти не рассеивает энергию в выходной цепи.
Защитный диод на реле не является обязательным. Его наличие зависит от силы тока, индуктивности катушки и максимального напряжения Uкэ транзистора. А вот наличие диода в выходной цепи больше зависит от того, хотим ли мы продлить срок службы контактов реле.
В конце рассуждений о реле приведем ситуацию, когда данный вид управления двигателем является оптимальным. Предположим, что мы хотим управлять двигателем, у которого номинальное рабочее напряжение 2,5 В и ток 3А и работает он от источника напряжением 2,5 В (переключение с небольшой частотой). Если вы будете использовать усилитель, построенный на транзисторе, то на выходе мы будем иметь падение напряжения около 1 В, что в данном случае является слишком большим значением. При использовании же реле у нас никакого падения напряжения не будет.
Управление двигателем при помощи H-моста
Решения, которые мы привели до этого, имеют основной недостаток — с их помощью не возможно управлять двигателем в двух направлениях! Такая необходимость, скорее всего, нам пригодиться, например, при строительстве роботов. H-моста — это конструкция, которая может быть построена как из обоих типов транзисторов, как и с реле.

Буква «H» исходит из того, что четыре реле и двигатель в середине образуют на схеме букву «H».
Подробно о том, как работает H-мост можно почитать здесь
Управление шаговым двигателем
Шаговые двигатели, так же как и коллекторные, состоят в основном из катушек. То есть для вращения нужно пропустить ток через катушки. Таким образом, все из представленных схем управления двигателями могут быть использованы и для управления шаговым двигателем. (все, кроме H-моста)
Разница в схеме усилителя мощности для шаговых двигателей заключается в том, что здесь немного другие напряжения и токи, и также в основном требуется 4 переключателя на один двигатель (когда двигатель имеет пять контактов).
Номинальное рабочее напряжение, в основном, находится в диапазоне 9 — 24 В. При таких не малых напряжениях мы имеем дело также с большим током: 0,3 — 1A на одну фазу! Ниже приведен пример подключения шагового двигателя с 5 выводами:

В роли ключей мы можем также использовать MOSFET — транзисторы. Это даже более простое решение.
Так как нам нужно до 4-х транзисторов, которые занимают довольно много места на плате, хорошим решением будет использовать микросхему ULN2003A.







