Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
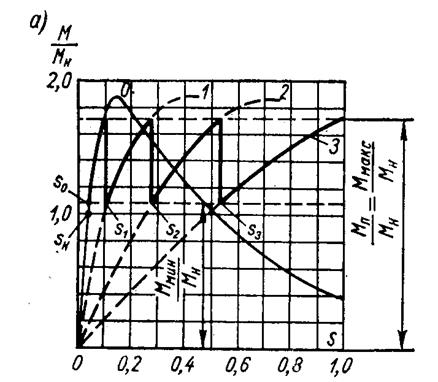
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Замкнутая схема импульсного регулирования скорости асинхронного двигателя с помощью резистора в цепи ротора




![]()
![]()
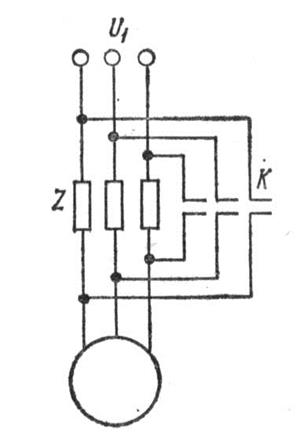
В схеме ЭП (рис.3) с импульсным регулированием сопротивления в цепи выпрямленного тока ротора для получения жестких характеристик использована отрицательная обратная связь по скорости двигателя.
В роторную цепь АД включен неуправляемый трехфазный выпрямитель В, к выходу которого подключен резистор R2Д.
 |
Рисунок 3 – Замкнутая схема импульсного регулирования скорости АД с помощью резистора в цепи ротора
Параллельно резистору включен управляемый ключ К (коммутатор).
Управление ключом происходит от широтно-импульсного модулятора ШИМ, на вход которого поступают сигналы задания U3.C и обратной связи Uo.c по скорости.
При поступлении на вход ШИМ сигнала ошибки Uy = UЗ.С – UОС он начинает генерировать импульсы управления. Эти импульсы с помощью схемы управления ключом СУК распределяются по тиристорам ключа и вызывают периодическое включение и закорачивание резистора R2 .
Принцип получения жестких характеристик ЭП состоит в следующем. Допустим, что АД работает в установившемся режиме при каком-то заполнении ключа К, чему соответствует эквивалентное сопротивление цепи ротора.
Пусть по каким-то причинам произошло увеличение момента нагрузки АД, в результате чего начнет снижаться его скорость. Тогда сигнал управления Uy начнет повышаться, что вызовет увеличение заполнения работы ключа К и уменьшение тем самым эквивалентного сопротивления в цепи ротора. Это, в свою очередь, приведет к увеличению тока в роторе и момента АД и прекращению снижения скорости, что соответствует жестким характеристикам ЭП. В схеме может быть достигнуто и регулирование (ограничение) тока и момента, для чего она должна быть дополнена контуром регулирования тока.
Импульсное регулирование скорости
![]()
![]()
Импульсное регулирование скорости (рис.1) производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора К сопротивлений, включенных последовательно в цепь статора, или полупроводниковых вентилей.
При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малой мощности (рн
Регулирование скорости вращения с помощью реостата в цепи ротора
Регулирование скорости вращения с помощью реостата в цепи ротора производится по той же схеме, что и реостатный пуск двигателя, но реостат при этом должен быть рассчитан на длительную работу. При увеличении активного сопротивления вторичной цепи вид механической характеристики двигателя изменяется
характеристика становится более мягкой и скольжение двигателя при том же моменте нагрузки Мст увеличивается.
При Мст = const рабочее скольжение s с большой точностью пропорционально sm и, следовательно, активному сопротивлению цепи ротора. Поэтому скольжения s и s’, соответствующие случаям rд = 0 и  , находятся в соотношении
, находятся в соотношении
откуда значение rд, необходимое для получения скольжения s’, равно
Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в сопротивлении rд и поэтому малоэкономичен.
Он применяется главным образом при кратковременной или повторно-кратковременной работе (например, пуско-наладочные режимы некоторых машин, крановые устройства и пр.), а также в приводах с вентиляторным моментом.
В последнем случае мощность на валу с уменьшением скорости быстро снижается, и поэтому мощность скольжения и потери в цепи ротора по величине ограничены.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Регулирование скорости вращения посредством введения добавочной э. д. с. во вторичную цепь двигателя.
Регулирование скорости вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения

большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом к. п. д. установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам фазного двигателя приемник электрической энергии в виде подходящей для этой цели вспомогательной электрической машины.
Эта машина будет работать в режиме двигателя и оказывать воздействие на регулируемый асинхронный двигатель, развивая напряжение на его вторичных зажимах, так как при вращении вспомогательной машины в ее якоре индуктируется э. д. с.

Можно также сказать, что задачей вспомогательной машины, как и реостата при реостатном регулировании, является создание «подпора» напряжения на контактных кольцах регулируемого асинхронного двигателя, ибо наличие определенного напряжения на кольцах  — непременное условие выдачи с этих колец определенной мощности
— непременное условие выдачи с этих колец определенной мощности

во внешнюю цепь двигателя. Вместе с тем, вспомогательная машина в отличие от реостата позволяет полезно использовать эту мощность. Прежде всего рассмотрим вопрос о влиянии на работу фазного асинхронного двигателя внешней добавочной э.д.с. Е2, вводимой во вторичную цепь двигателя с помощью его контактных колец, при условии, что частота этой добавочной э. д. с. всегда равна частоте вторичного тока и э.д.с.  самого двигателя.
самого двигателя.
На рис.1,а, изображена векторная диаграмма вторичной цепи асинхронного двигателя при Ед = 0. Вторичный ток двигателя
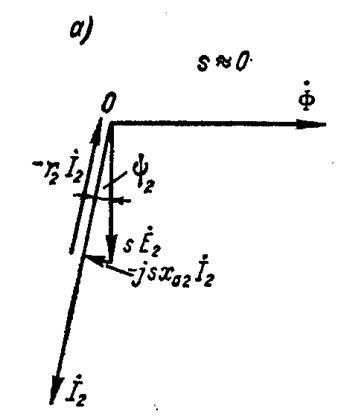
имеет величину, необходимую для создания нужного электромагнитного момента М в соответствии с величиной момента нагрузки Мст на валу.
Если теперь во вторичную цепь ввести э. д. с. Ед встречно э. д. с. скольжения E2s в этой же цепи, то вторичный ток
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s — увеличиваться. При этом ток Iа, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов М = Мст„ на валу. Двигатель при этом будет работать с увеличенным скольжением s, а векторная диаграмма вторичной цепи приобретет вид, изображенный на рис.1,б.
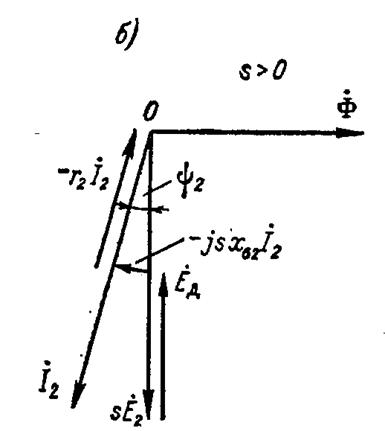
Очевидно, что посредством регулирования величины Ед можно регулировать величину s и, следовательно, скорость вращения двигателя.
Предположим теперь, что э.д.с. Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с э. д. с.  на рис. 1, а. Тогда вместо получим
на рис. 1, а. Тогда вместо получим

В первый момент после введения э. д. с. Ед ток I2 и момент М возрастут, двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток Iа. создаваемый в этом случае только за счет действия Ед, все еще будет велик по сравнению с током, необходимым для создания момента М = Мст то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и э. д. с. при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока ток не упадет до необходимой величины. При s







