Три наиболее популярные схемы управления асинхронным двигателем
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.

Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп»,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Схема управления двигателем с помощью магнитного пускателя
Схема показана на рисунке.
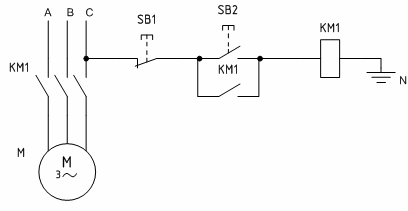
При нажатии на кнопку SB2 «Пуск» на катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем ( N) . Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке «Пуск». Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки «Пуск» катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют «толчковым». Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 «Стоп». При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку «Стоп» и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 «Пуск». Таким образом, магнитный пускатель обеспечивает т.н. «нулевую защиту». Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала. Подробнее смотрите здесь — защита минимального напряжения.
Анимация процессов, протекающих в схеме показана ниже.
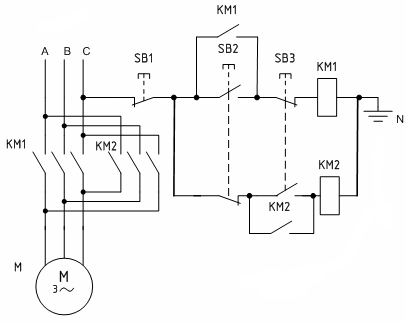
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы — A , B , С, а при включении пускателя KM2 — порядок фаз меняется на С, B , A.
Схема показана на рис. 2.
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1 . При необходимости смены направления вращения необходимо нажать на кнопку SB1 «Стоп», двигатель остановится и после этого при нажатии на кнопку SB 3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку «Стоп».
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок «Пуск» SB2 — SB 3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже.
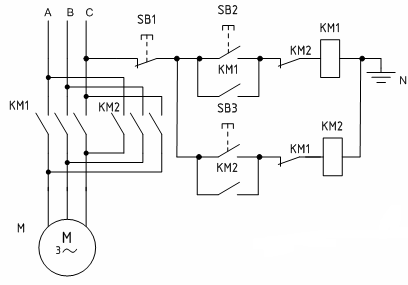
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 «Стоп»включены по 2 контакта кнопок SB2 и SB 3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB 3 — нормально-закрытый (размыкающий) контакт, в цепи КМ3 — кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB 3 — нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку «Стоп», что очень удобно. Кнопка «Стоп» нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B . Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Транзисторное управление двигателями в схемах на микроконтроллере
Электрический двигатель — это машина, преобразующая электрическую энергию в механическую. Первые электродвигатели появились в середине 19 века. Успехи в их разработке связывают с именами таких выдающихся физиков и инженеров, как Н.Тесла, Б.Якоби, Г.Феррарис, В.Сименс.
Различают электро двигатели постоянного и переменного тока. Преимущество первых заключается в возможности экономичного и плавного регулирования частоты вращения вала. Преимущество вторых — большая удельная мощность на единицу веса. В микроконтроллерной практике часто применяют низковольтные двигатели постоянного тока, используемые в бытовых и компьютерных вентиляторах (Табл. 2.13). Встречаются также конструкции с сетевыми двигателями.
Таблица 2.13. Параметры вентиляторов фирмы Sunon

Обмотку двигателя следует рассматривать как катушку с большой индуктивностью, поэтому её можно коммутировать обычными транзисторными ключами (Рис. 2.78, а…т). Главное — это не забыть про защиту от ЭДС самоиндукции.
В двигателях постоянного тока имеется возможность изменять направление вращения ротора в зависимости от полярности рабочего напряжения. В таких случаях широко используют мостовые схемы «Н-bridge» (Рис. 2.79, а…и).

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи (начало):
а) регулирование скорости потока воздуха вентилятора M1. Конденсатор С/ уменьшает ВЧ- помехи. Диод VD1 защищает транзистор VT1 от выбросов напряжения. Резистор R1 определяет степень насыщения транзистора Г77, а резистор R2 закрывает его при рестарте MK. Частота импульсов ШИМ на выходе МК должна быть не менее 30 кГц, т.е. за пределами звукового диапазона, чтобы исключить неприятный «свист». Элементы С/ и R2 могут отсутствовать;
б) плавное регулирование частоты вращения вала двигателя M1 через канал ШИМ. Конденсатор С/ является первичным, а конденсатор С2— вторичным фильтром сигналов ШИМ; О

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
в) транзисторы VT1, VT2 соединяются параллельно для увеличения суммарного коллекторного тока. Резисторы R1, R2 обеспечивают равномерную нагрузку по мощности на оба транзистора, что связано с разбросом у них коэффициентов И2]Э и ВАХ переходов «база — эмиттер»;
г) двигатель M1 (фирма Airtronics) имеет «цифровой» вход управления, что позволяет подключать к нему MK напрямую. Транзисторные ключи (драйверы) находятся внутри двигателя;
д) два отдельных источника питания позволяют значительно снизить влияние на MK электрических помех, которые генерирует двигатель M1. Система будет работать устойчивее. GB1 — это маломощная литиевая батарея, GB2, GB3 — это пальчиковые гальванические элементы с общим напряжением 3.2 В и мощностью, достаточной для запуска и работы двигателя M1\
е) параллельные резисторы R2, R3 служат ограничителями тока, протекающего через двигатель M1. Кроме того, они стабилизируютток в нагрузке, если транзистор VT1 находится в активном режиме или на грани входа в режим насыщения;
ж) MK включает/выключает двигатель M1. Резистором R3 подстраивается частота оборотов его вала. Стабилизатором служит «магнитофонная» микросхема DA1 фирмы Panasonic. С её помощью на зажимах двигателя M1 поддерживаются постоянные параметры, которые практически не зависят от колебаний температуры и напряжения питания;
з) дроссели L7, L2 и конденсаторы C7, С2фильтруют излучаемые двигателем радиопомехи. С той же целью двигатель помещается в заземлённый экранированный корпус;

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
и) вибромотор M1 является источником мощных электромагнитных и радиочастотных помех. Элементы L/, L2, C1 служат фильтрами. Резистор R2 ограничивает пусковой ток через два приоткрытом транзисторе VT1 Диоды VD1, УА2срезаютвершиныимпульсныхпомех;
л) применение ключа на полевом транзисторе VT1 повышает КПД по сравнению с ключом на биполярном транзисторе, ввиду более низкого сопротивления «сток — исток». Резистор R1 ограничивает амплитуду наводок, которые могут «просачиваться» от работающего двигателя M1 во внутренние цепи MK через ёмкость «затвор — сток» транзистора VT1;
м) транзистор VT2 является мощным силовым ключом, который подаёт питание на двигатель ML а транзистор VT1 — демпфером, который быстро тормозит вращение вала после выключения. Резистор R1 снижает нагрузку на выход MK при заряде ёмкостей затворов полевых транзисторов VT1, VT2. Резистор Я2отключаетдвигатель M1 при рестарте MK;
н) ключ на транзисторах VT1, VT2 собран по схеме Дарлингтона и имеет большое усиление. Для регулирования скорости вращения вала двигателя M1 может применяться метод ШИМ или фазо-импульсное управление. Система не имеет обратной связи, поэтому при снижении скорости вращения из-за внешнего торможения будет уменьшаться рабочая мощность на валу;

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи
м) встраивание MK в уже существующий тракт регулирования скорости вращения вала двигателя Ml. В этот тракт входят все элементы схемы, кроме резистора R2. Резистором R4 выставляется «грубая» частота вращения. Точная подстройка осуществляется импульсами с выхода MK. Возможна организация обратной связи, когда МК следит за каким-либо параметром и динамично подстраивает скорость вращения в зависимости от напряжения питания или температуры;
о) скорость вращения вала двигателя M1 определяется скважностью импульсов в канале ШИМ, генерируемых с нижнего выхода MK. Основным коммутирующим ключом служит транзистор VT2.2, остальные транзисторные ключи участвуют в быстрой остановке двигателя M1 по сигналу ВЫСОКОГО уровня с верхнего выхода MK;
п) плавное регулирование частоты оборотов вала двигателя M1 производится резистором R8. ОУ ТШ служит стабилизатором напряжения с двойной обратной связью через элементы R1, R8, C2 и R9, R10, C1. Комбинацией уровней с трёх выходов MK (ЦАП) можно ступенчато изменять скорость вращения вала двигателя M1 (точный подбор резисторами R2…R4). Линии MK могут переводиться в режим входа без « pull-up» резистора для увеличения числа «ступенек» ЦАП;

Рис. 2.78. Схемы подключения электродвигателей через транзисторные ключи (окончание):
p) фазо-импульсное управление двигателем переменного тока M1. Чем большее время за период сетевого напряжения открыт транзистор VT1, тем быстрее вращается вал двигателя;
с) включение мощного двигателя переменного тока Ml производится через оптотиристор KS7, который обеспечивает гальваническую развязку от цепей MK;
т) аналогично Рис. 2.78, п, но с одним кольцом обратной связи через элементы C7, R6, R8. Резистор R4 регулирует частоту вращения вала двигателя Ml плавно, а MK — дискретно.

Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (начало):
а) направление вращения вала двигателя Ml изменяется мостовой «механической» схемой на двух группах контактов реле KL1, K1.2. Частота переключения контактов реле должна быть низкой, чтобы быстро не выработался ресурс. Дроссели L7, L2 снижают коммутационные токи при переключении реле и, соответственно, уровень излучаемых электромагнитных помех;

Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (продолжение):
б) при ВЫСОКОМ уровне на верхнем и НИЗКОМ уровне на нижнем выходе МК транзисторы К77…к ТЗ открываются, а транзисторы КГ4…КГ6закрываются,инаоборот. Когда полярность питания двигателя Ml изменяется на противоположную, то его ротор вращается в обратную сторону. Сигналы с двух выходов МК должны быть противофазными, но с небольшой паузой НИЗКОГО уровня между импульсами, чтобы закрыть оба плеча (устранение сквозных токов). Диоды VD1..VD4уменьшают выбросы напряжения, тем самым защищая транзисторы от пробоя;
в) аналогично Рис. 2.79, б, но с другими номиналами элементов, а также с аппаратной защитой от одновременного открывания транзисторов одного плеча при помощи диодов VD3, VD4. Диоды VD1, КД2повышают помехоустойчивость при большом расстоянии до MK. Конденсатор С/ снижает «искровые» импульсные радиопомехи, генерируемые двигателем Ml;

Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (продолжение):
г) аналогично Рис. 2.79, б, но с отсутствием «запирающих» резисторов в базовых цепях транзисторов VT2, VT4. Расчётнато,чтообмоткадвигателяЛ//достаточнонизкоомная,следователо, при рестарте МК внешние помехи на «висящих в воздухе» базах транзисторов VT1 VT2, VT4, VT6 не смогут открыть их коллекторные переходы;
д) аналогично Рис. 2.79, б, но с максимальным упрощением схемы. Рекомендуется для устройств, выполняющих второстепенные функции. Напряжение питания +Еи должно соответствовать рабочему напряжению двигателя M1\
е) в отличие от предыдущих схем, транзисторы VT1…VT4 включаются по схеме с общим эмиттером и управляются ВЫСОКИМ/НИЗКИМ уровнем непосредственно с выходов MK. Двигатель M1 должен быть рассчитан на рабочее напряжение 3…3.5 В. Диоды VD1… VD4 уменьшают выбросы напряжения. Фильтр LL C1 снижает импульсные помехи по питанию от двигателя M1, которые могут приводить к сбоям в работе MK. Встречающиеся замены деталей: VT1 VT3- KT972; VT2, VT4- KT973; VD1…VD4- КД522Б, Rx = 3.3 кОм; R2 = 3.3 кОм;
ж) мостовая схема на четырёх управляющих транзисторах VT1 VT2, VT4, VT5 структуры р—п—р. Подстроечным резистором R4 регулируется напряжение на двигателе Ml, а значит, и частота оборотов сразу для двух направлений вращения ротора;

Рис. 2.79. Мостовые схемы подключения электродвигателей к MK (окончание):
з) мостовая схема для управления мощным двигателем Ml (24 В, 30 А). Смена полярности напряжения на двигателе производится противофазными уровнями на средних выходах MK, а скорость вращения — методом ШИМ на верхнем и нижнем выходах MK;
и) транзисторы VT2, VT5 подают питание на мостовую схему управления двигателем Ml. Их запараллеливание позволяет подключить к диоду VD1 ещё одну такую же схему.
Источник: Рюмик, С. М., 1000 и одна микроконтроллерная схема. Вып. 2 / С. М. Рюмик. — М.:ЛР Додэка-ХХ1, 2011. — 400 с.: ил. + CD. — (Серия «Программируемые системы»).







