Схема для мотора от дисковода
 Однажды, разбирая коробку с компьютерным хламом, я обнаружил у себя несколько дисководов от от старых 3-х дюймовых гибгих дисков. В свое время я извлек из них шаговые двигатели, а выбросить оставшиеся внутренности не поднялась рука. Сейчас мое внимание привлек двигатель для вращения дисков. Он выполнен самостоятельным блоком на отдельной печатной плате вместе с контроллером привода.
Однажды, разбирая коробку с компьютерным хламом, я обнаружил у себя несколько дисководов от от старых 3-х дюймовых гибгих дисков. В свое время я извлек из них шаговые двигатели, а выбросить оставшиеся внутренности не поднялась рука. Сейчас мое внимание привлек двигатель для вращения дисков. Он выполнен самостоятельным блоком на отдельной печатной плате вместе с контроллером привода.
Задача состояла в том, как его запустить. Поиск решения в сети Internet по запуску такого двигателя не дал какого-либо положительного результата. Было множество статей по использованию шаговых двигателей позиционирующих магнитную головку и практически ничего по запуску «блина» — двигателя вращения диска. Единственная обнаруженная статья была на английском языке, но там описывался очень древний и конкретный дисковод. В общем пришлось искать способ запуска самостоятельно.
С чего я начал. К плате управления подходит шлейф из 4-5 цветных проводов в зависимости от типа дисковода. Два из них подают питание 12V (это было не трудно проследить), и как правило имеют цвета черный(общий) и красный(+). Оставшиеся провода, как я предположил, должны управлять пуском двигателя и скорее всего имеют ТТЛ уровни.
На плате я также обнаружил два фотоэлемента: один на краю платы — он определяет, что диск вставлен в приемник; второй фотоэлемент стоит ближе к центру двигателя — он позиционирует начальное положение диска в котором имеется соответсвующее отверстие. Нас интересует первый (удаленный) фотоэлемент, так как при вставленном диске мотор уже начинает вращаться (в подключенном к компьютеру дисководу).
Фотография контроллера с мотором от дисковода фирмы TEAC приведена на рисунке 1.
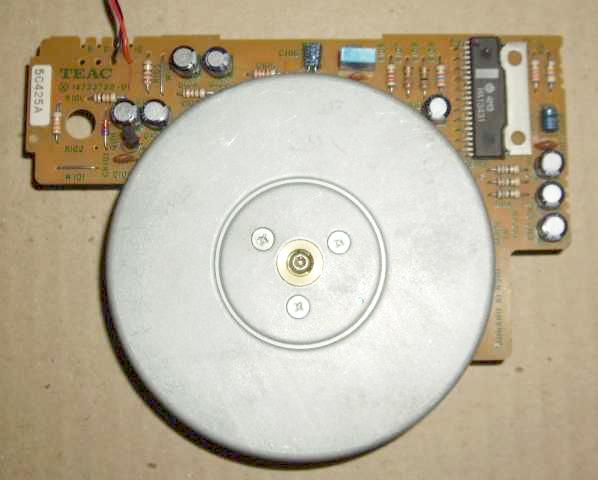
Puc.1
Далее, проследив на плате цепь от фотоэлемента, я установил, что она через транзистор поступает на вход управления микросхемы H13431 — контроллер двигателя (описание этой микросхемы нашел только на японском языке). На тот же транзистор подключен через диод один из проводов входного шлейфа.
Далее — дело техники. Подал на плату питание 12 вольт. Через резистор номиналом 3,3 ком вычисленный контак соединил с плюсом питания. ВСЕ. Двигатель начал вращаться!
Фрагмент платы с установленныи резистором показан на рисунке 2. Крайний левый контакт не задействован (видимо какой-то выходной сигнал). Следы пайки на плате — моя оплошность: подал на входной контакт непосредственно напряжение питания 12В и сжег транзистор, далее действовал осторожнее — через резистор номиналом 3,3 ком.
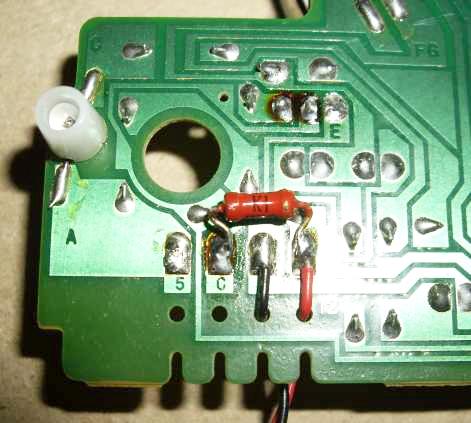
Puc.2
На другом дисководе (рис.3) с названием Sankyo и микросхемой контроллера M51784 пошел таким же путем (описание этой микросхемы есть на сайте www.datasheetcatalog.com). Нашел входной контакт на плате который выходит через резистор на управляющий транзистор и фотоэлемент. Также через резистор подал на него положительный потенциал. И. тишина. Попробовал поочередно позамыкать на «землю» оставшиеся два входных контакта. Заработало. Что это за контакт я не стал выяснять.

Puc.3
Увеличенный фрагмент второй доработанной платы приведен на рисунке 4. «Земляной» контакт и контакт от него слева запаяны вместе. Крайний левый контакт остался свободным.
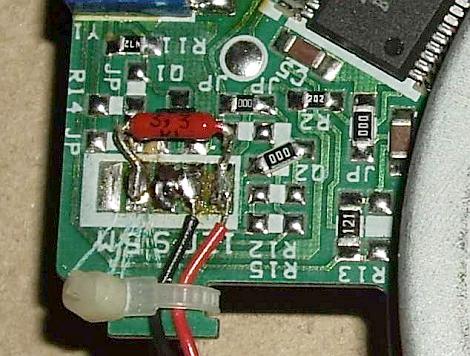
Puc.4
Таким образом порядок подключения неизвестного дисковода достаточно прост:
1. Находим провода питания (обычно красный+ и черный-).
2. Пытаемся найти цепь управляющего транзистора и фотоэлемента (примерная схема на рис.5).
3. Если двигатель не вращается оставшиееся контакты замыкаем на «землю» (или подаем на них положительный потенциал через ограничительный резистор в несколько ком).
Puc.5
Дальнейшие эксперимены с двигателем показали, что он работоспособен в диапазоне питающих напряжений от 7 до 12 вольт. При этом скорость вращения его очень стабильна, так как задается кварцевым или пъезокерамическим резонатором. Кстати можно попытаться поставить резонатор на другую частоту тем самым изменив скорость вращения. На моих платах резонатор выполнен в виде пластмассового прямоугольника синего цвета — его легко найти.
Применение данного двигателя оставляю на вашу фантазию. Желаю удачи!
AVR-STM-C++
суббота, 6 апреля 2019 г.
Шаговый двигатель из CD/DVD привода
Попались в мои руки несколько приводов оптических дисков, которые я разобрал. В итоге помимо плат и прочей механики стал обладателем нескольких шаговых двигателей, которые позиционируют лазерную головку. Захотелось их как-то использовать, но информации по ним фактически никакой. После продолжительного и настойчивого гугления информацию я таки нашел и решил поделится ею с вами.
Итак, шаговый двигатель cd rom

Он имеет маркировку 0550902, чуть ниже 15RF 172KP, хотя можно прочитать и слитно, получится 15RF172KP. Так же маркировка на шлейфе 3 e232171. С обратной стороны выгравировано SM15DD — это тип винта двигателя.

После длительных поисков datasheet я нашел каталог продукции фирмы MOATECH, в котором и упоминается данный двигатель из сд привода. Это двигатель SPS-15RF-172KP, в каталоге есть небольшое упоминание SPS-15RF Type, где присутствует позиция 172FH.
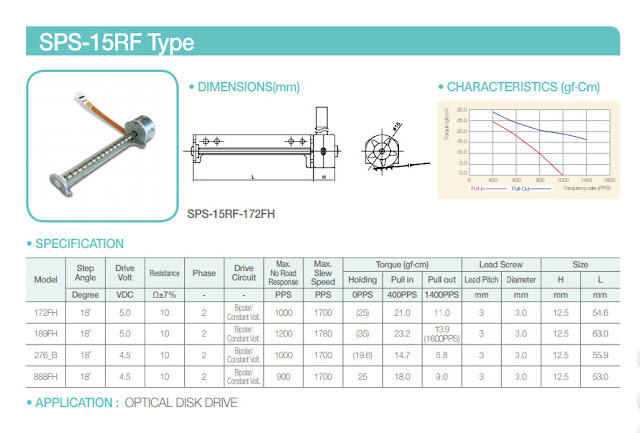
Пусть последние буквы маркировки и не совпадают, но думаю, что это одно и то же. Давайте теперь посмотрим, что же это за шаговик такой.
Характеристики шагового двигателя
В табличке есть данные по сопротивлению обмоток, 10 Ом на обмотку, я проверил — мультиметр показал 10 Ом. Так же можно увидеть угол поворота — 18 градусов на шаг. И, самое важное, напряжение питания двигателя — 5 вольт. Идеально для использования с AVR микроконтроллерами или Arduino.
Этот двигатель dvd привода имеет две фазы, видим, что он биполярный (это должно быть и так ясно, исходя из количества выводов). Для таких двигателей необходимы специальные драйвера управления, в следующей статье будем собирать свой драйвер на полевых транзисторах. Это обусловлено их принципом работы. Давайте посмотрим, как управлять биполярным шаговым двигателем.
Распиновка шагового двигателя
Тут все предельно просто, имеем четыре вывода и две обмотки — по два вывода на обмотку.

Я промаркировал выводы обмоток приписав плюс и минус дабы не путаться где первая обмотка, а где вторая, хотя было бы более правильно написать первый вывод и второй.
Управление биполярным шаговым двигателем
Вот и добрались до вопроса как управлять шаговым двигателем. Это довольно сложный процесс в плане реализации, так как из-за наличия двух фаз нужно подавать напряжение на обмотку в разные стороны. Тоесть в какой-то момент мы подаем плюс на первый вывод первой обмотки, на второй вывод этой же обмотки минус, а в какой-то момент нужно подать наоборот — плюс на второй вывод первой обмотки и минус на первый вывод первой обмотки. Для того, чтоб двигатель вращался, ток на обмотки нужно подавать вот в такой последовательности

Я привел схему подачи тока на биполярный шаговый двигатель в виде четырех полных шагов двигателя. Чтоб двигатель вращался, достаточно после четвертого шага выполнить первый шаг и продолжить дальше. Чтоб двигатель вращался в обратную сторону, то шаги нужно выполнять с обратной последовательности, например 4-3-2-1-4-3. и так далее.
Эта схема управления не такая уж сложная, но в плане подачи тока могут возникнуть затруднения. Но об этом мы поговорим в следующей статье, а сейчас давайте вернемся к нашим двигателям. Я описал только один, а у меня их два.
Второй двигатель выглядит точно так же, как и первый, но имеет другую маркировку — 172F p10816H1. Тем не менее это тот же самый SPS-15RF, который с этой же буквой F после 172 есть в первой позиции таблички из каталога. Так что идентификация обоих двигателей успешно произведена, технические характеристики определены и можно приступать к повторному использованию этих шаговиков.
Из старого флоппи-дисковода – станок для правки мелких свёрл
Когда-то давным-давно сделал из старого «винчестера» станочек для правки и заточки мелких свёрл, но у него слишком велика минимальная скорость вращения и обычно когда торопишься, то свёрла перегреваются. Пытался как-то уменьшать обороты, ничего хорошего не получилось и поэтому оставил всё как есть, просто заставив себя не торопиться. А тут недавно пришли знакомые компьютерщики и с вопросом «посмотри, из этого можно что-нибудь полезного сделать?» начали вываливать на стол множество дисководов на три с половиной дюйма (рис.1). И почему-то первой же мыслью было – а не попробовать ли собрать новую низкоскоростную «правку»…

Не откладывая это дело в долгий ящик, тут же снимаем крышки с нескольких дисководов разных марок и смотрим, что там внутри.
А внутри всё по-разному и у разных моделей одной марки управление двигателями может быть собрано и на одной и на двух микросхемах (рис.2).
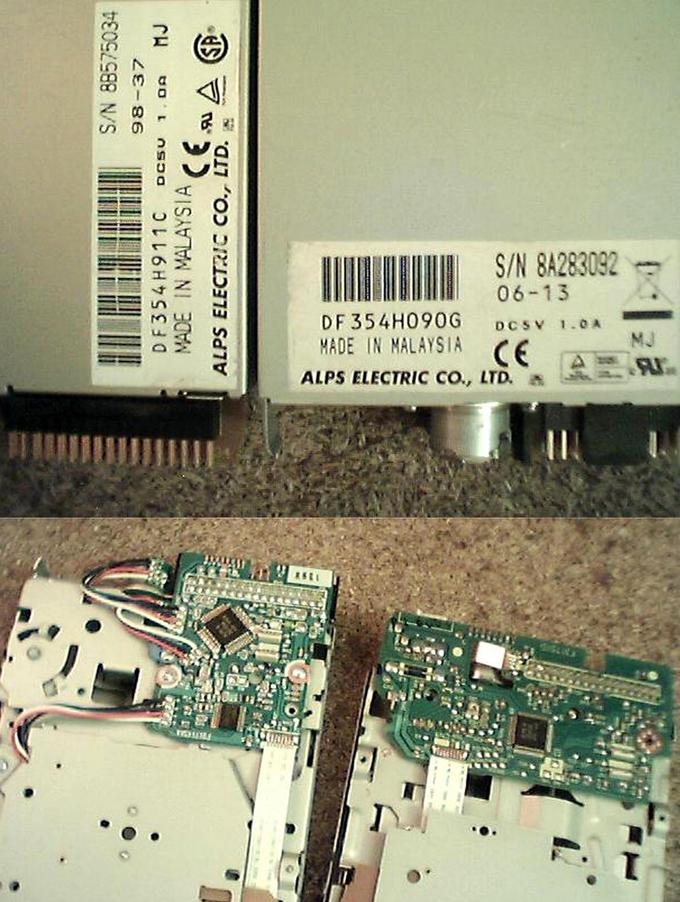
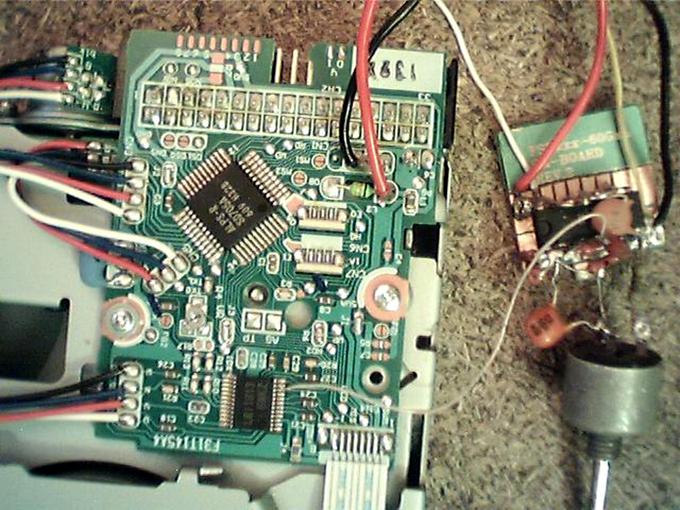
Рассматриваем детали на платах поподробнее и отдаём предпочтение варианту с двумя микросхемами (рис.3) – по дорожкам и подходящим проводам видно, что правая микросхема ALPS-R SD705A (кроме всего прочего) отвечает за работу шагового двигателя перемещения считывающей головки, а левая LB11813 – только за работу двигателя вращения диска.
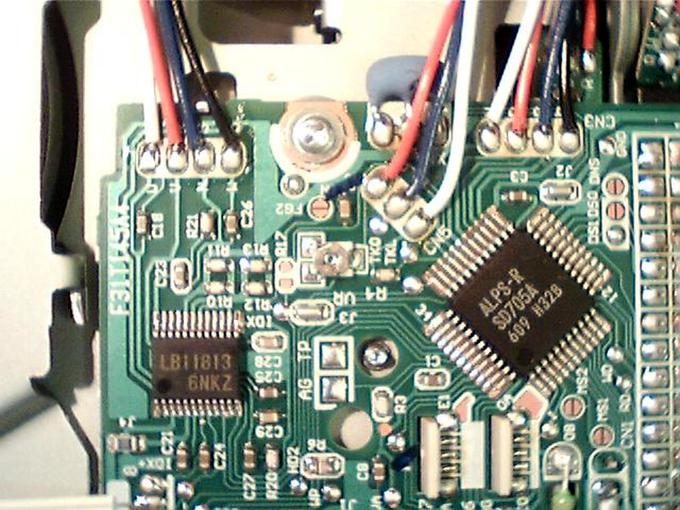
Также видно, что обе микросхемы соединяются всего двумя сигнальными дорожками – 33 и 34 выводы большой микросхемы идут к соединённым вместе 10-му и 11-тому выводам и к 12 выводу LB11813 соответственно.
Честно говоря, ранее уже приходилось сталкиваться с дисководами и уже есть некоторое представление о принципе их работы, поэтому, сказав для пущей важности «сейчас мы здесь что-нибудь отрежем…», аккуратно перерезал обе эти дорожки (рис.4).
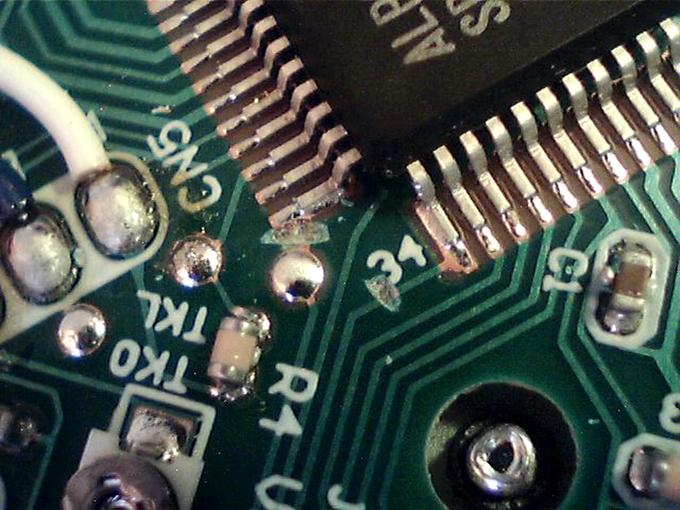
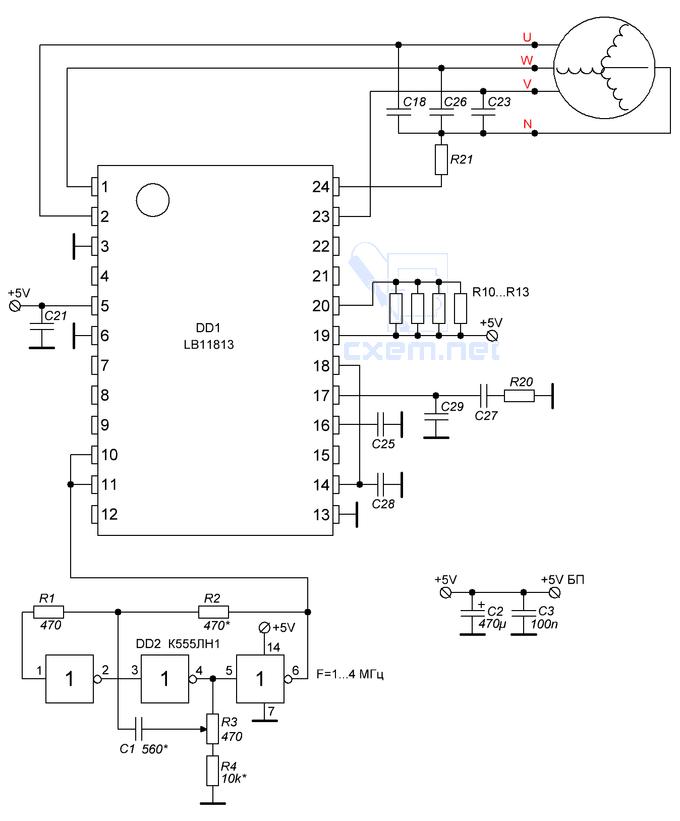
Вывод 12 микросхемы LB11813 оставляем в покое, а на 10-й и 11-й нужно подать тактовый сигнал CLK. Так как частота его следования должна быть около 1 МГц, а амплитуда стандартная для микросхем пятивольтовой серии, то собираем на подвернувшемся под руку кусочке текстолита генератор прямоугольных импульсов на микросхеме К555ЛН1. Ставим переменный резистор для регулирования частоты и при среднем его положении подбором ёмкости конденсатора подгоняем выходную частоту к 1 МГц. Затем соединяем выход генератора с выводами LB11813 (рис.5), подпаиваем шины питания дисковода и генератора и включаем БП. Слышим, что двигатель начал вращаться. Это хорошо… Покрутив ручку переменного резистора, слышим как меняется частота вращения двигателя. И это хорошо…
Гости, радостные и окрылённые открывшимися перспективами, помчались домой, на ходу обдумывая, как можно использовать это «чудо техники», а я вернулся к схеме, чтобы посмотреть, что нужно оставить, а что убрать, и как это всё это облагородить в корпусе…
Сначала, вооружившись тестером, карандашом и листком бумаги, срисовал с платы схему (рис. 6). Здесь нумерация элементной обвязки, относящейся к микросхеме LB11813, оставлена старой, т.е. той, что была на плате.
Затем посмотрел некоторые технические характеристики. Потребляемый от пятивольтового блока питания ток на холостом ходу равен 0,22 А, при средней «нагрузке» на валу двигателя – меняется от 0,5 А до 0,7 А. Перед самой остановкой вращения ток достигает значения 0,85 А. Температура нагрева корпуса микросхемы LB11813 зависит от нагрузки, но в любом случае не превышает 50-70 градусов.
Минимальная частота генератора, при которой ещё вращается двигатель – около 0,45 МГц, максимальная – около 4,6 МГц.
Теперь дисковод полностью разбираю, оставив только две платы, соединённые 4-мя цветными проводами – по ним микросхема LB11813 управляет двигателем (рис.7). Белый восьмипроводный шлейф тоже не нужен – на плате с двигателем что было интересного, так это не то дроссель, не то какой другой элемент, но очень похожий на дроссель и отвечающий, скорее всего, за контроль частоты вращения двигателя (т.е. выполняющий функции датчика Холла) – так вот его можно выпаять, всё работает и без него. Остальные проводники шлейфа – это общий провод, напряжение питания, а также передача сигналов от концевых выключателей с платы двигателя (выпаиваем и их тоже).

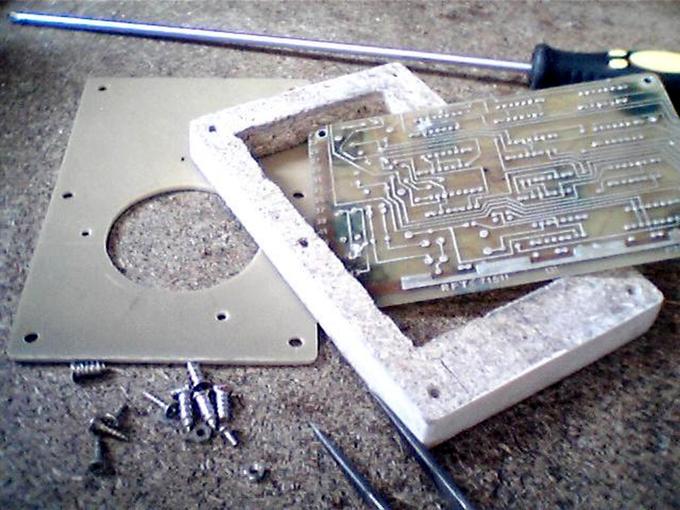
«Сдуваю» термофеном все ненужные элементы с большой платы и обрезаю её так, чтобы остались крепёжные отверстия (рис.8).

Готового подходящего по размерам не нашёл, взял кусок 16-миллиметровой ДСП, тонкий пластмассовый лист и кусок стеклотекстолита от старой печатной платы. Немного попилил, посверлил и закрепил всё так, чтобы не очень «выпирало» и не занимало много места на столе (рис.9, рис.10, рис.11, рис.12).


Печатную плату для импульсного генератора развёл, но пока не вытравил – неохота разводить «бодягу» ради одной-двух маленьких плат. А пока установил в корпус макетный вариант и приклеил термоклеем его и плату с микросхемой-приводом двигателя. Файл печатной платы в формате программе Sprint-Layout находится в приложении к статье (вид сделан со стороны установки деталей — рисунок при ЛУТ надо «зеркалить»).
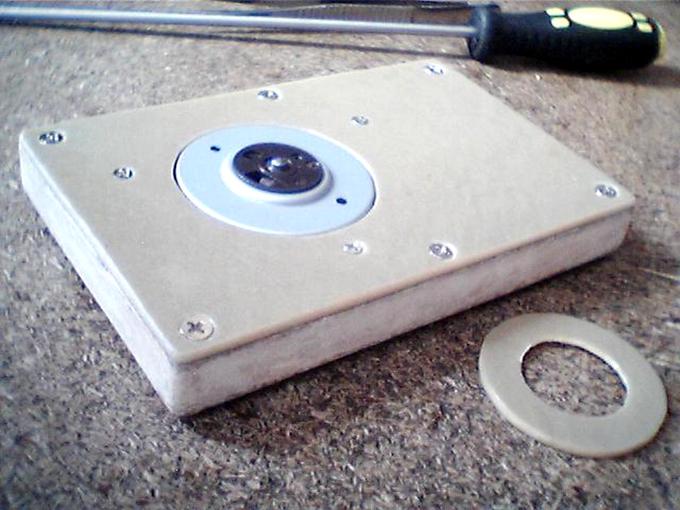
Никакой накладной декоративной панелью корпус сверху накрывать не стал – головки винтов так и оставил на виду. Пластмасса, из которой сделана верхняя крышка, попалась очень удачная – к ней не прилипают намертво никакие клеи из серий «Момент» или БФ и она практически не царапается и не мажется. Из той части, что осталась при выпиливания отверстия под вращающуюся поверхность двигателя, вырезал кольцо, которое приклеил сверху к этой вращающейся поверхности. На это кольцо можно наклеивать кольца из наждачной бумаги (рис.13), которые при желании достаточно легко содрать и на пластмассовой поверхности кольца почти не остаётся остатков клея. А что остаётся – сцарапывается ногтём.

В качестве блока питания применил импульсный преобразователь, выдающий 5В/1А от какой-то старой оргтехники. Провод питания впаян в схему напрямую – может быть это и не очень правильно, но зато блок питания никогда не теряется и потом, при его замене на новый, не приходится разбираться, где в разъёме «плюс, а где «минус»».
Никаких выключателей на корпусе нет, индикации подачи напряжения тоже. Движок резистора регулировки оборотов выведен сбоку. Учитывая, что за прошедший месяц пришлось два раза править свёрла и один раз затачивать несколько сломанных разного диаметра и за это время ни разу не появилось надобности уменьшить обороты, то получается, что можно было и не делать плавную регулировку. Настроить генератор на 4 МГц – и всё.
Конечно же, проверил работу схемы с двигателем от «винчестера» — всё работает так же, но с заметно меньшей мощностью в сравнении с управлением от «родного» контроллера. Это понятно — двигателю от HDD требуется более высокое напряжение питания.
Из академического интереса посмотрел форму сигналов в цепях питания двигателем. На рисунках ниже показаны состояния на «фазах» U и V относительно общего провода при тактовой частоте 4,6 МГц (рис.14), при 1 МГц (рис.15) и на одной из «фаз» и вывода, обозначенного на платах как N («нейтраль», надо полагать) (рис.16):
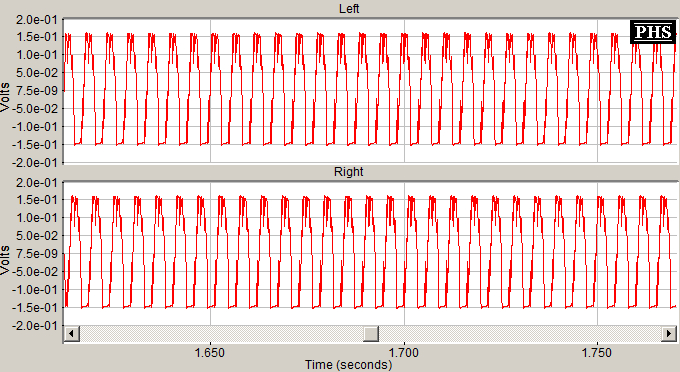
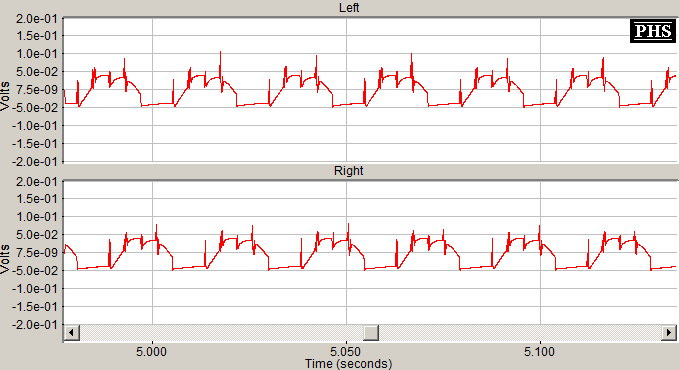
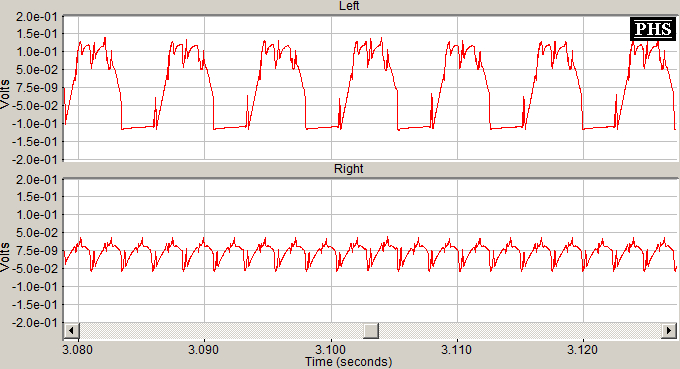
Сигналы «снимались» через резисторные делители, поэтому уровни не соответствуют показаниям шкалы напряжений, но так коэффициенты деления были одинаковы и не менялись, то отношения уровней относительно друг друга верны. Временные интервалы соответствуют действительности.







