Тормозные режимы работы двигателя с последовательным возбуждением
 Двигатели постоянного тока с последовательным возбуждением в электроприводах работают как в двигательном, так и в тормозных режимах. В отличие от двигателя с параллельным возбуждением генераторный режим с отдачей энергии в сеть для двигателей с последовательным возбуждением неприменим, так как для перехода в этот режим, как видно из механических характеристик (рис. 1), потребовалась бы недопустимо высокая скорость вращения. Основным, наиболее легко осуществимым, является тормозной режим противовключения .
Двигатели постоянного тока с последовательным возбуждением в электроприводах работают как в двигательном, так и в тормозных режимах. В отличие от двигателя с параллельным возбуждением генераторный режим с отдачей энергии в сеть для двигателей с последовательным возбуждением неприменим, так как для перехода в этот режим, как видно из механических характеристик (рис. 1), потребовалась бы недопустимо высокая скорость вращения. Основным, наиболее легко осуществимым, является тормозной режим противовключения .
В приводах машин с потенциальными статическими моментами (например, подъемные лебедки) перевод из двигательного режима в противовключение производится введением добавочного сопротивления в цепь якоря (точка А). Момент двигателя уменьшается, и под действием статического момента, создаваемого грузом, двигатель начнет вращаться в сторону, противоположную действию его момента. Груз будет опускаться (точка С).
Для торможения электрических машин с реактивным (без запаса потенциальной энергии) статическим моментом применяется переключение обмоток на обратное вращение (реверс). Все, что было сказано выше в отношении изображения характеристик в этом и других режимах двигателя с независимым возбуждением, в равной степени относится и к двигателю с последовательным возбуждением.
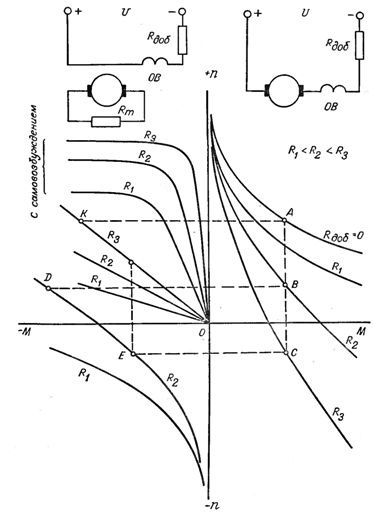
Рис. 1. Схемы включения и механические характеристики двигателя постоянного тока с последовательным возбуждением
Режим электродинамического торможения двигателя последовательного возбуждения осуществляется двумя путями: с независимым возбуждением и с самовозбуждением. При независимом возбуждении обмотка возбуждения подключается к сети через ограничивающее сопротивление, а якорь, отключенный от сети, включается на тормозное сопротивление. Магнитный поток в этом случае будет постоянным, а режим работы двигателя и механические характеристики будут соответствовать аналогичному электродинамическому торможению двигателя с параллельным возбуждением.
Иногда при динамическом торможении применяют самовозбуждение, то есть якорь, отключенный от сети, замыкают на тормозное сопротивление, заставляя двигатель работать в режиме генератора с самовозбуждением. При этом необходимо переключить концы обмоток якоря или возбуждения, тогда ток генераторного режима будет усиливать поток остаточного магнетизма, иначе самовозбуждения не произойдет.
При малых скоростях двигатель также не возбуждается. Начинаясь при некотором значении скорости, процесс самовозбуждения происходит очень быстро, что вызывает скачкообразное нарастание тормозного момента; в результате этого механическая часть привода испытывает удар.
Подобные явления обычно нежелательны, поэтому самовозбуждение применяют в случае аварийного торможения. Режим самовозбуждения не требует питания обмоток от сети.
Динамическое торможение (с самовозбуждением )

Схема Динамическое торможение
Для выполнения этого торможения необходимо :1)наличие остаточного магнитного потока Фост.
2)совпадения по направлению Фост и Фов.
3)замкнутая цепь якоря.
4)скорость ДПТ должна быть отличная от нуля .
5)наводимая в якоре ЭДС должна быть равна суммарному падению напряжения в резисторах якорной цепи , т.е Е=IR
Принцип: вследствие наличие Фост при вращения якоря в нем наводится ЭДС →по якорю и по ОВ протекает ток →ток создает Ф(основной)который совпадает с Фост →увеличивается ЭДС →I↑, и так будет до тех пор пока ЭДС=IR. Вид кривой характеризуется кривой намагничивания, если Ф не совпадает с Iв то она преломляется вниз.
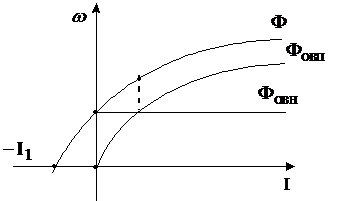
Особенности характеристик ДПТ со смеш.возбуждением

Последовательная (ОВП) и независимая (ОВН).
Магнитный поток двигателя Ф создается двумя составляющими: ФОВН ,ФОВП.
При I = -I1 магнитный поток Ф = 0, магнитная система размагничена.
 ;
;  При I = -I1,
При I = -I1,
Ф = 0 и скорость стремится к  .
.
При  момент равен М = 0, при изменении скорости
момент равен М = 0, при изменении скорости  момент изменяется до
момент изменяется до  , а затем уменьшается до нуля.
, а затем уменьшается до нуля.
ДПТ смешанного возбуждения работает в режимах: холостого хода, короткого замыкания, двигательном, генераторном, последовательно, параллельно с сетью и независимо от сети.
Регулирование осуществляется : изменением Ф, тока якоря

Естественные мех. и эл.мех хар-ки АД.

Для исследование АД используют

 — синхронная скорость
— синхронная скорость
Схема замещения
Где:I1-ток статора;  — приведенный ток ротора;R1- активное сопротивление статора;
— приведенный ток ротора;R1- активное сопротивление статора;  — приведенное активное сопротивление ротора;
— приведенное активное сопротивление ротора;  — приведенное индуктивное сопротивление ротора;X1- индуктивное сопротивление ротора;
— приведенное индуктивное сопротивление ротора;X1- индуктивное сопротивление ротора;
Xm-сопротивление контура намагничивания; s-скольжение  ;
;
из приведенной схемы замещения получаем 
 , w=f(I), таким образом с S↑—
, w=f(I), таким образом с S↑—  ↑ и при S→∞ ,
↑ и при S→∞ ,  =lim
=lim
При (-) S –генераторный режим ток в пределах 0≤ ≤ max
 ;
; 

3- 
4- 
Уравнение для w=f(M) получают из баланса мощности роторной цепи  ;
;
 -электромагнитная мощность;
-электромагнитная мощность;  -механическая полезная мощность
-механическая полезная мощность
 подставив значение
подставив значение  получим уравнение w=f(M);
получим уравнение w=f(M);
Из w=f(M) можно увидеть две точки Mкр и Sкр
 Mкр
Mкр 
 ; Sкр
; Sкр 
(+ двигательный режим;- генераторный режим) 

1)s=0;w=w0- режим идеального ХХ
3)0 w0- генераторный режим(рекуперативного торможения)
5)S>1,w w0- генераторный режим(рекуперативного торможения)
6)режим Динамического торможения — статор, к const ток,цепь ротора замыкается накоротко
Хорош для const нагрузки т.к с увеличением  жесткость падает т.к. один и тот же перепад нагрузки будет давать разные перепады скорости
жесткость падает т.к. один и тот же перепад нагрузки будет давать разные перепады скорости
Достаток :уменьшается пусковой ток , экономичность.
 Регулирование АД с помощью активного Rд в статоре
Регулирование АД с помощью активного Rд в статоре
Rде w0- генераторный режим(рекуперативного торможения) 5)S>1,w Xк1>Xке
R=var↑ Mкр↓ var из w=f(M)
R=var↑ Sкр↓ var из соотношения Sкр 
R=var↑  ↓ var из соотношения для W=f(I)
↓ var из соотношения для W=f(I)
R=var↑ w0=const т.к 
1)s=0;w=w0- режим идеального ХХ
3)0 w0- генераторный режим(рекуперативного торможения)
Дата добавления: 2018-02-15 ; просмотров: 1238 ; Мы поможем в написании вашей работы!
Торможение двигателей последовательного возбуждения. Механические характеристики в тормозном режиме




![]()
![]()
Торможение противовключением для двигателей последовательного возбуждения принципиально невозможно, так как при изменении полярности приложенного напряжения направление тока якоря изменяется, но одновременно изменяется и направление магнитного потока. При этом направление электромагнитного момента в соответствии с правилом левой руки не меняется, то есть он не может быть тормозным.
Режим рекуперативного торможения графически описывается характеристикой, находящейся во втором квадранте координатной плоскости и поэтому для двигателей последовательного возбуждения не возможен, так как характеристика двигателей последовательного возбуждения не пересекает оси ординат.
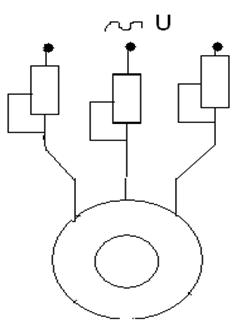
Единственно возможным способом торможения двигателей последовательного возбуждения является динамическое торможение, которое реализуется аналогично двигателям независимого возбуждения.
 |
Рисунок 2.26 – Реализация динамического торможения двигателей последовательного возбуждения
Однако режим динамического торможения существенно отличается от аналогичного режима в двигателях независимого возбуждения, так как он является режимом самовозбуждения. При отключении питающего напряжения в магнитной системе вращающегося двигателя, остается незначительный остаточный магнитный поток. Под действием этого потока в якорной обмотке наводится ЭДС Е, соответственно по замкнутой цепи якоря протекает ток I, усиливающий магнитный поток Ф, в результате чего увеличивается ЭДС Е, которая приводит к увеличению тока I и т. д. Происходит лавинообразный процесс нарастания I, E и Ф, результатом которого является статический установившийся режим, при котором магнитный поток достигает номинального значения Ф= ФНОМ.
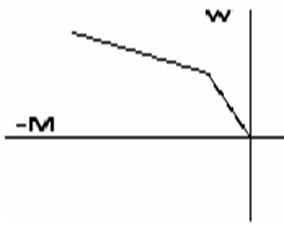
Механическая характеристика двигателя в режиме динамического торможения представлена на рисунке 2.27.
 |
Рисунок 2.27 – Механическая характеристика двигателя последовательного возбуждения в режиме динамического торможения
Необходимо отметить, что режим самовозбуждения при динамическом торможении двигателей последовательного возбуждения может быть реализован только при определенных условиях. Для выяснения этих условий изобразим две характеристики (рисунок 2.28):
1) Зависимость ЭДС, возбуждаемой в обмотке якоря током, протекающим по цепи якоря Е=f(I);
2) Прямую, наклон которой по отношению к осям определяется величиной сопротивления RI=f(I).
 |
Не трудно убедиться, что для того чтобы режим динамического торможения был возможен, необходимо, чтобы эти функции пересекались, а, учитывая то, что R=RЯ+RВ+RТ для этого необходимо сопротивление RТ подобрать так, чтобы суммарное сопротивление якоря R было
R RГР,
RГР,
где RГР – граничное сопротивление, при котором некоторая характеристика RI=f(I) по отношению к Е=f(I) будет являться касательной.







