- Схема динамического торможения двигателя
- Схема динамического торможения асинхронного двигателя с короткозамкнутым ротором
- Пуск асинхронного двигателя с кз ротором
- Осатнов асинхронного двигателя с кз ротором
- Виды и схемы динамического торможения асинхронного двигателя
- Асинхронный двигатель и его работа
- Что такое динамическое торможение?
- Основные виды динамического торможения
- Виды динамического торможения
- Классическое динамическое торможение
- Рекуперативное торможение
- Торможение противовключением
- Торможение самовозбуждением
- Как происходит динамическое торможение асинхронной машины
Схема динамического торможения двигателя
 Некоторые технологии требуют, чтобы процесс остановки электропривода протекал интенсивнее, чем только под действием статического момента. В этом случае в схемах управления используют различные виды электрического торможения — динамическое торможение и торможение противовключением, а также механическое торможение с помощью электромагнитных тормозов. Наиболее популярным и распространенным способом является использование динамического торможения двигателей.
Некоторые технологии требуют, чтобы процесс остановки электропривода протекал интенсивнее, чем только под действием статического момента. В этом случае в схемах управления используют различные виды электрического торможения — динамическое торможение и торможение противовключением, а также механическое торможение с помощью электромагнитных тормозов. Наиболее популярным и распространенным способом является использование динамического торможения двигателей.
На рисунке приведена принципиальная схема нереверсивного электропривода, которая позволяет производить пуск и остановку электродвигателя с динамическим торможением.
Питание на схему подаётся автоматическим выключателем QF, напряжение переменного тока на обмотку статора — линейным контактором КМ1, напряжение постоянного тока — контактором (пускателем) динамического торможения КМ2. Источник постоянного тока содержит трансформатор Т и выпрямитель V1, подключаемые к сети контактором КМ2 только в режиме торможения.
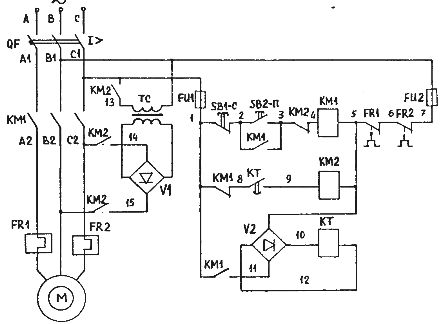
Схема нереверсивного асинхронного электропривода с динамическим торможением
Команда на пуск подаётся кнопкой SB2-П, а команда на остановку подаётся кнопкой SBC. При ее нажатии включается контактор КМ1, и двигатель подключается к сети. Для остановки двигателя нажимают кнопку SB1-C, контактор КМ1 отключается и отключает двигатель от сети переменного тока. Одновременно нормально закрытым (н.з.) блок-контактом КМ1 включается контактор КМ2, подающий в обмотки статора двигателя постоянный ток. Двигатель переходит в режим динамического торможения. Длительность подачи постоянного тока в обмотки статора контролируется реле времени КТ. После отключения катушки КТ его контакт в цепи катушки КТ2 с выдержкой времени размыкается.
В схеме применены нулевая, максимально-токовая, осуществляемая соответственно линейным контактором КМ1, автоматическим выключателем QF с максимально-токовым расцепителем. Схема управления защищена предохранителями FU1 и FU2. При срабатывании любой из защит отключается линейный контактор КМ1. Используемая в схеме блокировка контактами 3-4 и 1-8 запрещает одновременное срабатывание контакторов КМ1 и КМ2.
Тепловая защита двигателя выполняется тепловыми реле FR1, FR2, размыкающие контакты которых включены в цепь катушки контактора КМ. При срабатывании одного из тепловых реле контактор КМ отключается, и схема возвращается в исходное состояние. Повторно она может быть включена после остывания теплового реле и двигателя.
Схема динамического торможения асинхронного двигателя с короткозамкнутым ротором

Динамическое торможение асинхронного двигателя выполняется отключением двигателя от трехфазной сети и подачи постоянного напряжения на любые две обмотки статора (AB, BC или AC). Магнитный поток в обмотках статора, взаимодействует с током ротора, создавая тормозной момент, что приводит к полному останову двигателя.
Пуск асинхронного двигателя с кз ротором
Подача напряжения на управляющую и силовую цепь осуществляется автоматическим выключателем QF. Нажатием кнопкой SB1 “Пуск” запитывается магнитный пускатель КМ1, который срабатывает и замыкает свои контакты:
- КМ1.1 в цепи статора — двигатель запускается
- КМ1.2 — шунтирует кнопку “Пуск”
- КМ1.3 -подает напряжения на реле времени КТ
и размыкает нормально замкнутый контакт КМ1.4 который не даст сработать магнитному пускателю КМ2, после срабатывания реле времени КТ.
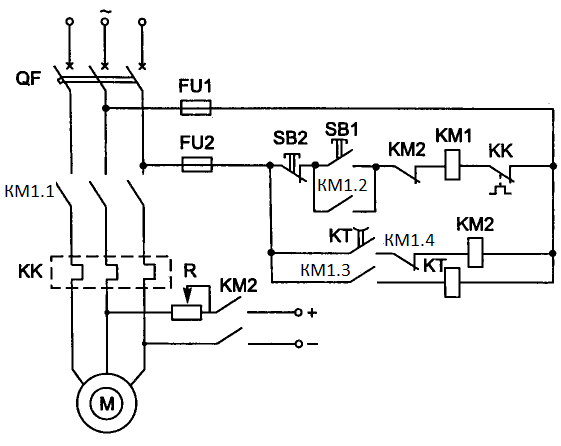 Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Осатнов асинхронного двигателя с кз ротором
При нажатии кнопки SB2 “Стоп” катушка пускателя КМ1 обесточивается и пускатель одновременно возвращает свои контакты в исходное положение:
- Размыкает КМ1.1 (прекращает подачу электрического тока на обмотку статора) – асинхронный двигатель обесточен.
- Размыкает КМ1.2 — разблокирует кнопку пуска
- Размыкает КМ1.3 — обесточивает реле времени КТ
- Замыкает нормально замкнутый контакт КМ1.4, что приводит подачи напряжения на контактор КМ2, так как контакты реле времени КТ размыкаются не сразу, а через заданный временной интервал. При срабатывании КМ2 на статор асинхронного двигателя подаётся постоянное напряжение, двигатель переходит в режим динамического торможения.
В схеме применено реле времени с выдержкой времени при размыкании. Длительность подачи постоянного напряжения на статор будет равна выдержки реле КТ. После истечении выдержки скорость вала двигателя близка к нулю, контакты КТ размыкаются и обесточивают КМ2 и двигатель отключается от сети.
Для регулировки интенсивности торможения в цепь статора включен регулировочный резистор R. В схеме применена блокировка с помощью размыкающих контактов КМ1.4 и КМ2 для невозможности включения статора двигателя одновременно в сеть постоянного и трехфазного тока.
Виды и схемы динамического торможения асинхронного двигателя
Электропривод является основой практического большинства современных механизмов. Одной из форм его работы является динамическое торможение асинхронного двигателя. Почему этот режим имеет такое значение и как он организовывается, попытаемся разобраться в этой статье.
Асинхронный двигатель и его работа
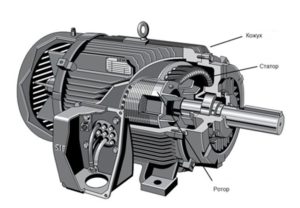 Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
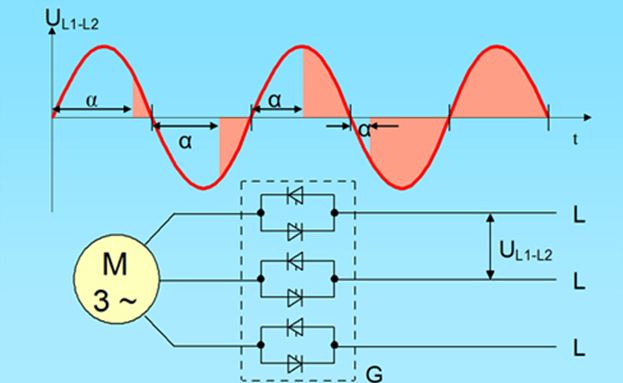
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Виды динамического торможения
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Рекуперативное торможение
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Торможение противовключением
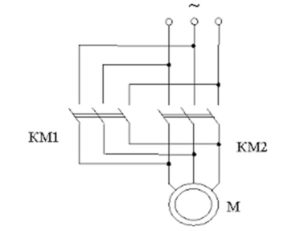
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Торможение самовозбуждением
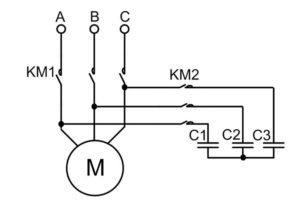
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.
Как происходит динамическое торможение асинхронной машины
Еще одним видом торможения асинхронного электродвигателя, применимого как для машин с короткозамкнутым ротором, так и с фазным, является динамическое торможение. Динамическое торможение довольно распространено в системах электроприводов, так как не требует большой сложности схемы, имеет устойчивые характеристики в отличии от конденсаторного торможения и торможения противовключением.
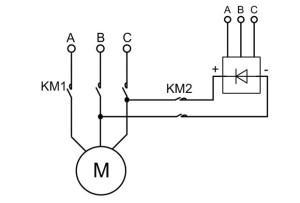
Одна из возможных схем включения ниже:

Принцип работы динамического торможения довольно прост – двигатель отключается от сети с помощью контактора КМ1 и с помощью контактора КМ2 подключают к двум фазам электродвигателя постоянный ток, в нашем случае полученный с выпрямителя. Постоянный ток, который начнет протекать по двум обмоткам статора, создаст постоянное магнитное поле. При вращении ротора асинхронной машины в этом постоянном магнитном поле в обмотках роторных индуктируется ЭДС, которая в свою очередь приведет к появлении в роторе тока. При взаимодействии тока ротора с магнитным полем статора возникает тормозной момент.
В таком режиме работы асинхронный электродвигатель будет представлять собой обычный синхронный генератор с неявно выраженными полюсами и работающим с переменной частотой. Нагрузкой этого генератора будет сопротивление включенное в роторную цепь, или же при использовании асинхронной машины с короткозамкнутым ротором – его обмотка. При торможении будет снижаться скорость асинхронного электродвигателя, и соответственно начнет снижаться ЭДС ротора, его ток и тормозной момент.
Симметричное подключение всех трех обмоток при динамическом торможении невозможно без специальной коммутирующей аппаратуры. Поскольку подключение всех трех фаз к цепи постоянного тока не окажет существенное влияние на характеристику и существенно усложнит схему, используют подключение двух фаз к цепям постоянного тока как показано ниже для соединения звезда:

И для соединения в треугольник:

Также при выборе источника постоянного напряжения для выполнения динамического замедления асинхронной машины необходимо учитывать то, что при подаче на статорные обмотки постоянного напряжения изменится сопротивления обмоток, а именно, исчезнет индуктивное сопротивление. Именно поэтому, при выборе устройства динамического торможения необходим перерасчет напряжения (постоянное будет значительно меньше переменного), что бы не «спалить» обмотку двигателя.
В качестве такого источника могут использовать обычные диодные выпрямители неуправляемые подключенные через трансформатор, тиристорные преобразователи или же для машин больших мощностей специальные генераторы постоянного тока с пониженным выходным напряжением.
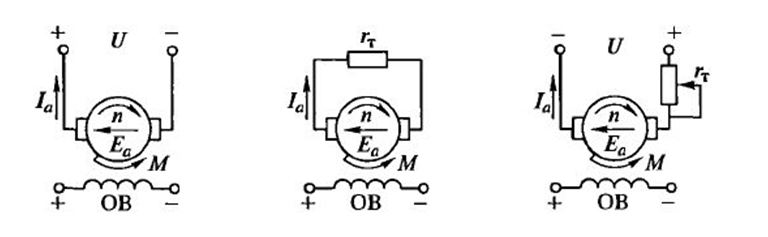
Для анализа явлений, происходящих в асинхронном электродвигателе при динамическом торможении, более целесообразно заменить режим работы синхронного генератора переменной частоты (в этом режиме работает асинхронный двигатель при динамическом замедлении) заменить эквивалентным ему режимом, когда статор вместо постоянного тока питается переменным. В этом случае совместно обмотками ротора и статора будет создаваться результирующая магнитодвижущая сила МДС. При замене эквивалентной режима работы необходимо, что бы выполнялось равенство магнитодвижущих сил, то есть Fn=Fϟ.

Где: а) подключение обмотки статора к источнику постоянного напряжения;
б) создание обмотками статора пространственно смещенных друг относительно друга магнитодвижущих сил;
в) результирующая МДС. Векторная диаграмма.
Из рисунка в) можем определить:

Амплитуда данной МДС, создаваемая переменным I1 статорной обмотки:

Из равенства Fn=Fϟ можно вычислить эквивалентное значение переменного тока постоянному:

Из этого выражения следует то, что для создания номинального магнитного потока постоянный ток должен быть больше, чем переменный.
Где: In – постоянный, а I1 – действующий токи статора.
W1 – количество витков в одной фазе статорной обмотки.
Характерные величины для питания других схем постоянным током показаны в таблице ниже:

После определения I1, который эквивалентен постоянному, можно асинхронную машину в режиме динамического торможения представить как нормальный асинхронный электродвигатель. Ниже показана векторная диаграмма для токов асинхронной машины в предположении того, что к частоте сети и числу витков статора приведена обмотка ротора.

Но, работа асинхронного электродвигателя в режиме динамического торможения существенно отличается от его работы в нормальном режиме. При работе в нормальном (двигательном) режиме магнитный поток машины остается практически неизменным. А при динамическом торможении с изменением скорости вращения вала электродвигателя будет меняться и магнитный поток. Это вызвано изменением результирующей МДC, которая складывается с МДС статора (постоянный I) и изменяющейся МДС ротора (переменный I переменной частоты).
Приведенный к числу витков статора намагничивающий ток:

Из векторной диаграммы:

Возведя в квадрат получим:

При фиксированном значении частоты сети, синхронной скорости ω0, магнитном потоке в роторе машины будет индуцироваться ЭДС Е2. Если скорость изменится, то ЭДС будет равна Е2(ω/ω0). Соответственно индуктивное и активное сопротивление роторной цепи будет r2 и Х2(ω/ω0), где Х2 – сопротивление индуктивное при определенной частоте сети. Для упрощения расчетов введем коэффициент ν, равный ν=(ω/ω0). Для вторичного контура будет справедливо следующее соотношение: Е2 / ν = I2 / z2 / . После выполнения приведения параметров вторичного контура к количеству витков первичного получим Е1 = Е2 / . Намагничивающий ток:


Преобразовав предыдущие выражения:


Подставив значение в предыдущее уравнение:


Развиваемый двигателем момент электромагнитный будет определятся потерями во вторичном контуре:

Из полученного выражения можно определить, что возникающий момент при динамическом торможении будет определятся током I1 и есть функцией скорости вращения вала электродвигателя ν.
Исследовав выражения на максимум и минимум, найдем критический момент при относительной скорости:

А критический момент:

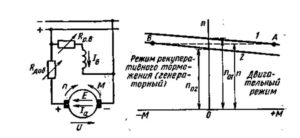
Ниже показана характеристика динамического торможения при различных роторных сопротивлениях и разных значениях статорных токов:

На графике кривые 1 и 3 снятые при постоянном сопротивлении роторной цепи и изменении постоянного напряжения статора, а 2 и 4 – при неизменном напряжении статора и меняющемся сопротивлении ротора.
Выражения момента может принять вид:

При динамическом торможении асинхронного двигателя его можно рассматривать как генератор синхронный в режиме короткого замыкания и при переменной скорости вращения. Соответственно Iкз:

Роторное сопротивление функции скорости Е = сω, и Хd = 2πfLd = kω.
Поэтому, ток короткого замыкания Ik практически не зависит от скорости при больших скоростях вращения вала машины:

Однако при сильном снижении скорости индуктивное сопротивление тоже снижается, и оно становится соизмеримым с активным. Активное сопротивление, в свою очередь, начинает существенно влиять на Ik в сторону его уменьшения. Данная зависимость приведена ниже:

Вид данной механической характеристики будет определять зависимость активной составляющей Ik от скорости вращения:

Механические характеристики асинхронного электродвигателя в режиме динамического торможения по форме практически ничем не отличаются от механических характеристик в двигательном режиме. Однако в режиме динамического торможения характеризующие его кривые имеют сильные отличия от двигательного режима:
- При динамическом торможении результирующий магнитный поток неподвижен, в отличии от двигательного режиме, где он вращается с синхронной скоростью;
- В двигательном режиме статорный ток меняется в зависимости от скольжения, при динамическом замедлении он неизменен;
- Магнитный результирующий поток в двигательном режиме постоянен, при динамическом же торможении, особенно при малых скоростях, он увеличивается. Это вызвано малым размагничивающим действием ротора;
- Для двигательного режима все характеристики берут начало в точке синхронной скорости (n0 или ω0), а при динамическом торможении начало находится в точке, которая соответствует неподвижному ротору.
Расчет механической характеристики асинхронного электродвигателя в режиме динамического торможения заключается в необходимости определить основные параметры схемы, которые обеспечат получение характеристики нужного вида. Для данного случая характеристики определяют значения момента критического Мк и критической скорости νк.
По универсальной или же экспериментально снятой характеристике холостого хода определяют реактивное сопротивления контура намагничивания:

Где Uф.хх – фазное напряжение холостого хода; I0 – ток холостого хода соответственно. В случае если νк приближается к единице, то Хμ рекомендуется определять по начальной линейной части характеристики холостого хода (ХХ).
Для известных Хμ, νк и Х2 / приведенное активное сопротивление ротора будет равно:

Последнее необходимо для того, что бы определить добавочное сопротивление ротора, которое подключается, конечно же, только для асинхронных электродвигателей с фазным ротором. Зная Мк и Хμ:

После этого для выбранной схемы подключения устройства динамического торможения с помощью таблицы указанной выше или же с помощью расчетов находят необходимое значение постоянного Iн. после чего переходят к построению характеристики механической без учета насыщения.
Насыщение оказывает влияние на динамическое торможение асинхронным электродвигателем тем, что при изменении тока намагничивания индуктивное сопротивление намагничивания Хμ будет величиной переменной, что соответственно скажется на тормозном моменте (он тоже будет переменен).
Зависимость Хμ = f(Iμ) может определятся по кривой намагничивания Е1 = f(Iμ). Для этого могут использовать либо экспериментально снятую кривую, либо универсальную для данного типа асинхронного двигателя. Что бы получить характеристику Е1 = f(Iμ) к зажимам статора асинхронной машины, приводимой в движение другой машиной с синхронной скоростью, подключают изменяющееся по величине напряжение. Потребляемый из сети ток, при таких условиях, и будет Iμ, соответствующий приложенному напряжению.
С учетом насыщения механическая характеристика строится по точкам. Для этого задаются рядом значений Iμ в пределах от I1 до 0 и с помощью кривой намагничивания определяют соответствующие значения индуктивности намагничивания:

Если значения I1, Iμ, а также Хμ и выполнив соответствующие преобразования в уравнениях, получим две неизвестные: I2 / и ν. Исключив I2 / :


Интересующее нас выражение примет вид:

После чего, располагая знаниями I1, Хμ, ν находят значение момента по формуле приведенной ранее, которое соответствует ν с учетом насыщения. Таким образом, находят точки механической характеристики для значений Iμ от максимального значения до нуля.
Наиболее широко динамическое торможение распространено в электроприводах шахтных подъемных машин, но оно не менее активно применяется и в других отраслях промышленности.







