- Трёхфазные асинхронные двигатели: методы торможения
- Варианты построения электрических тормозов
- Принцип торможения противотоком
- Торможение двигателя с короткозамкнутым ротором
- Противоточное торможение на двигателях с фазным ротором
- Торможение вводом постоянного тока
- Критерии применения метода вводом постоянного тока
- Торможение двигателей электронным и сверхсинхронным способом
- Другие тормозные системы
- Видео торможения вала двигателя динамическим способом
- Виды и схемы динамического торможения асинхронного двигателя
- Асинхронный двигатель и его работа
- Что такое динамическое торможение?
- Основные виды динамического торможения
- Виды динамического торможения
- Классическое динамическое торможение
- Рекуперативное торможение
- Торможение противовключением
- Торможение самовозбуждением
Трёхфазные асинхронные двигатели: методы торможения
Главная страница » Трёхфазные асинхронные двигатели: методы торможения

Значительное число приводных систем используются при естественном замедлении работы двигателей в процессе остановки. Время, затрачиваемое на остановку ротора, измеряется исключительно инерционным моментом и моментом сопротивления вращению. Между тем нередко эксплуатация систем требует сокращать время остановки вала мотора и в этом случае электрическое торможение хода электродвигателя видится простым и эффективным решением. По сравнению устройствами, где применяются механический или гидравлический способы, электрическое торможение двигателей имеет явные преимущества в плане устойчивости действия и экономичности применения.
Варианты построения электрических тормозов
Рассмотрим несколько вариантов торможения двигателей электрическим способом, которые могут быть применимы на практике. При этом отметим возможности использования механизмов торможения по отношению к электродвигателям разных видов. Список рассматриваемых методик торможения включает следующие:
- противотоком,
- вводом постоянного тока,
- электронным способом,
- сверхсинхронной скоростью,
- другими способами.
Принцип торможения противотоком
Мотор отключается от электросети, и пока ротор продолжает вращаться, вновь подключается противофазой. Такая система создаёт эффективный момент блокировки, обычно превышающий пусковой момент.
Между тем, этот эффективный момент торможения должен быть быстро нивелирован, чтобы двигатель после остановки не вращался в противоположном направлении. Несколько устройств контроля и автоматики привлекаются для обеспечения замедления вращения вала электродвигателя до его полной остановки:
- датчики остановки фрикциона,
- датчики центробежного останова,
- хронометрические приборы,
- реле частоты,
- реле напряжения ротора (для двигателей с фазным ротором) и т. д.
Торможение двигателя с короткозамкнутым ротором
Прежде чем выбирать систему противотока для асинхронного мотора с КЗ ротором, важно обеспечить устойчивость двигателя к противоточному способу с учётом требуемой нагрузки.
Помимо механических напряжений, этот процесс подвергает ротор воздействию высоких тепловых нагрузок, так как энергия, выделяемая при каждой операции, рассеивается в теле ротора.
Тепловое напряжение на противотоке в три раза больше, чем при наборе скорости вращения. Здесь пики тока и крутящего момента заметно выше, если сравнивать с моментом пуска.
 Принцип методики противоточного воздействия на схему электродвигателя с целью быстрого замедления хода с последующей остановкой. Слева — нормальный рабочий цикл. Справа — цикл замедления и останова
Принцип методики противоточного воздействия на схему электродвигателя с целью быстрого замедления хода с последующей остановкой. Слева — нормальный рабочий цикл. Справа — цикл замедления и останова
Поэтому для обеспечения плавного останова двигателя системой противотока, как правило, последовательно с каждой фазой статора устанавливают резистор. Благодаря такому добавлению, при переключении уменьшается крутящий момент и ток, до значений, равных тем, что отмечаются на статоре в режиме пуска.
Однако противоточная система торможения имеет ряд серьёзных недостатков. Поэтому этот способ для асинхронных двигателей с короткозамкнутым ротором используется в редких случаях и преимущественно на маломощных моторах.


Противоточное торможение на двигателях с фазным ротором
Чтобы ограничить ток и крутящий момент, прежде чем статор будет переключен на противоточный ход, крайне важно использовать резисторы ротора, используемые для запуска.
При этом следует периодично добавлять дополнительную резистивную секцию торможения. При правильно подобранном значении роторного резистора, регулировать тормозной момент до требуемого значения несложно.
Момент переключения тока даёт напряжение ротора практически в два раза большее, чем когда ротор находится в состоянии покоя, что иногда требует особых мер при изоляции.
 Принцип противоточной электрической блокировки на моторах с фазным ротором. Слева — нормальный режим работы. Справа — замедление с остановом
Принцип противоточной электрической блокировки на моторах с фазным ротором. Слева — нормальный режим работы. Справа — замедление с остановом
Как и в случае с силовыми двигателями, цепь ротора выделяет значительное количество энергии. Вся выделенная энергия полностью рассеивается на резисторах (за исключением небольших потерь).
Двигатель может быть остановлен автоматически одним из вышеупомянутых устройств контроля. Например, с помощью реле напряжения или частоты в цепи ротора. С помощью схемы противотока удаётся поддерживать ведущую нагрузку с умеренной скоростью.
Однако характеристика крайне неустойчива (значительные колебания скорости по отношению к малым изменениям крутящего момента).
Торможение вводом постоянного тока
Этот вариант используется на двигателях с фазным и короткозамкнутым ротором. Если сравнивать с противоточной системой, стоимость применения источника выпрямленного тока компенсируется меньшим количеством резисторов.
Благодаря электронным регуляторам скорости и стартерам, этот способ торможения асинхронных электродвигателей видится вполне экономичным.
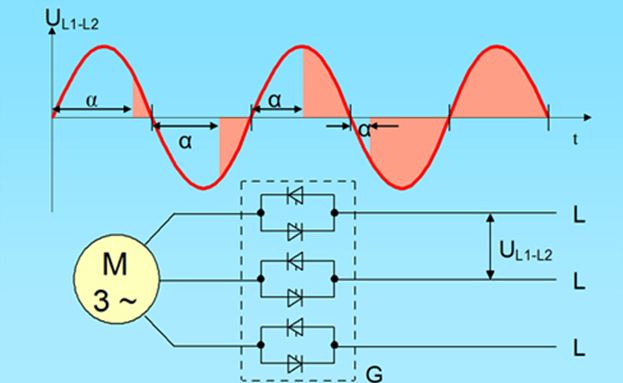
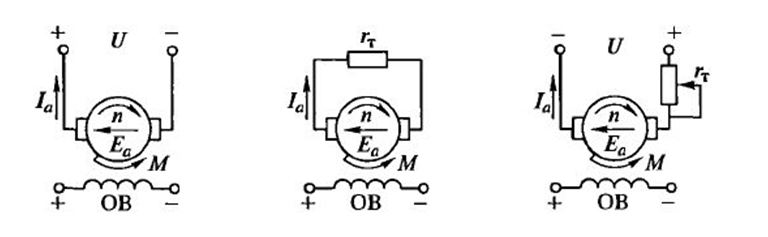
 Принцип останова путём ввода постоянного тока. Для работы этой системы требуется источник постоянного напряжения. Требования к величине напряжения не критичны
Принцип останова путём ввода постоянного тока. Для работы этой системы требуется источник постоянного напряжения. Требования к величине напряжения не критичны
Методика предполагает отключение обмоток статора от сети и подачу на обмотки выпрямленного тока. Прохождение выпрямленного тока по обмоткам статора сопровождается образованием фиксированного потока в воздушном зазоре между ротором и статорным кольцом двигателя.
Для достижения значения этого потока, способного обеспечить надлежащее торможение, ток должен быть примерно в 1,3 раза выше номинального тока. Избыток тепловых потерь, неизбежно вызываемых этим незначительным превышением, обычно компенсируется временной паузой после останова мотора.
Критерии применения метода вводом постоянного тока
Поскольку значение тока зависит от сопротивления обмотки статора, напряжение на источнике выпрямленного тока невысокое. Обычно источником выступает схема выпрямителя или контроллера скорости.
Эти источники выпрямленного тока должны быть адаптированы к переходным скачкам напряжения, происходящим на обмотках в момент отсоединения от переменного источника питания.
Движение ротора здесь следует рассматривать скольжением относительно поля, зафиксированного в пространстве. Поведение двигателя аналогично синхронному генератору с разгрузкой на роторе. Поэтому важны отличия характеристик, полученных на торможении вводом выпрямленного тока, по сравнению с противоточной схемой:
- Меньше энергии рассеивается на резисторах ротора или в теле ротора. Процесс эквивалентен механической энергии, массово выделяемой при движении. Единственная мощность, потребляемая от сети, — возбуждение статора.
- Когда нагрузка не является управляемой, двигатель не запускается в противоположном направлении.
- Если нагрузка является управляемой, система действует постоянно и удерживает нагрузку на низкой скорости. То есть достигается фактор замедления, а не полного торможения. Характеристика намного стабильнее, чем у системы противотока.
На моторах с фазным ротором характеристики крутящего момента зависят от выбора резисторов.
 Вариант тормозных резисторов: 1 — датчик нагрева; 2 — металлический шунт; 3 — высокотемпературный проводник; 4 — проволочный резистивный элемент; 5 — температурный блок; 6 — корпус
Вариант тормозных резисторов: 1 — датчик нагрева; 2 — металлический шунт; 3 — высокотемпературный проводник; 4 — проволочный резистивный элемент; 5 — температурный блок; 6 — корпус
На двигателях с короткозамкнутым ротором система позволяет легко регулировать момент торможения электродвигателя, воздействуя на энергетику постоянного тока. Тем не менее, тормозной момент остаётся низким, если мотор имеет высокие обороты.
Торможение двигателей электронным и сверхсинхронным способом
Эффект электронного торможения достигается относительно просто с помощью регулятора скорости, оснащенного тормозным резистором. Асинхронный двигатель действует как генератор. Механическая энергия рассеивается на ограничительном резисторе без увеличения потерь в самом двигателе.
Эффект торможения проявляется, когда двигатель достигает верхней точки синхронной скорости с переходом на более высокие значения. Здесь фактически инициируется режим асинхронного генератора и развивается тормозной момент. Возникающие при этом потери энергии восстанавливаются электросетью.
Подобный режим работы проявляется на двигателях подъёмников при спуске груза с номинальной скоростью. Тормозной момент полностью уравновешивается крутящим моментом от нагрузки.
За счёт этого равновесия удаётся тормозить не ослаблением скорости, а выводом двигателя в режим работы на постоянной скорости.
Для варианта эксплуатации моторов с фазным ротором, все или часть резисторов ротора должны быть накоротко замкнутыми, чтобы двигатель не развивал движение значительно выше номинальной скорости.
Сверхсинхронная система функционально видится идеальной для ограничения движения под нагрузкой, потому что:
- Скорость остаётся стабильной и практически не зависит от вращающего момента,
- Энергия восстанавливается и возобновляется в сети.
Тем не менее, сверхсинхронное торможение электродвигателей поддерживает только одну скорость вращения, как правило, номинальное вращение. На частотно-регулируемых двигателях используются сверхсинхронные схемы, благодаря которым изменяется скорость вращения вала от верхнего значения к нижнему значению.
Сверхсинхронное торможение легко достигается с помощью электронного регулятора скорости, который автоматически запускает эту систему при понижении частоты.



Другие тормозные системы
Редко, но всё-таки встречаются системы однофазного торможения. Эта методика включает питание двигателя между двумя фазами сети и подключает незанятый терминал к одному из двух других сетевых подключений.
 Вариант остановки простым реверсивным переключением — реверс поля вращения, образованного обмотками статора
Вариант остановки простым реверсивным переключением — реверс поля вращения, образованного обмотками статора
Тормозной момент ограничивается 1/3 максимального крутящего момента двигателя. Этой системой невозможно остановить мотор на полной нагрузке.
Поэтому такая схема традиционно дополняется противоточным методом. Вариант однофазной блокировки характеризуется значительным дисбалансом и высокими потерями.
Также применяется торможение электродвигателей ослаблением вихревых токов. Здесь работает принцип, аналогичный тому, что используется на промышленных транспортных средствах в дополнение к механическому торможению (электрические редукторы).
Механическая энергия рассеивается в редукторе скорости. Замедление и остановка электродвигателя контролируется простым возбуждением обмотки. Выраженный недостаток этого метода — значительное увеличение инерции.
Видео торможения вала двигателя динамическим способом
Виды и схемы динамического торможения асинхронного двигателя
Электропривод является основой практического большинства современных механизмов. Одной из форм его работы является динамическое торможение асинхронного двигателя. Почему этот режим имеет такое значение и как он организовывается, попытаемся разобраться в этой статье.
Асинхронный двигатель и его работа
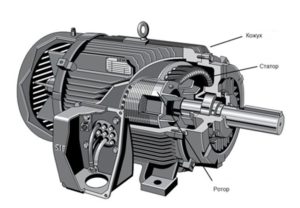 Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Виды динамического торможения
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Рекуперативное торможение
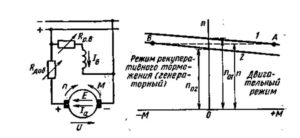
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Торможение противовключением
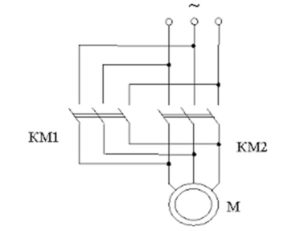
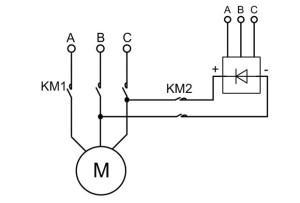
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Торможение самовозбуждением
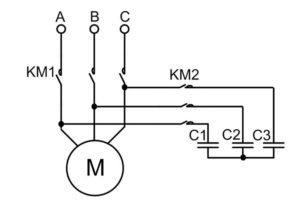
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.







