- Преобразователь частоты для асинхронного – схема
- Частотный регулятор скорости для асинхронного двигателя
- Устройство и принцип работы частотного регулятора
- Структура частотного регулятора
- Состав частотных преобразователей
- Однофазные преобразователи частоты
- Частотник своими руками – любительская схема преобразователя
- Как я сам изготовил частотный преобразователь
- Как сделать инвертор самому своими руками?
- Для чего предназначен инвертор – его принцип действия
- Как регулировать скорость инвертором?
- Из чего состоит привод регулирования?
- Режим управления частотников
- Как подключить инвертор треугольником и звездой?
- Применение инверторов нового поколения
Преобразователь частоты для асинхронного – схема
Асинхронный двигатель (машина) – это электрический двигатель, частота вращения которого не совпадает с частотой тока (ЭДС), прикладываемого к статору.
Рис. 1. Асинхронный двигатель
К преимуществам таких двигателей можно отнести их низкую стоимость, простоту изготовления и эксплуатации, а также возможность прямого включения (без регулирования или преобразования питающего тока). Есть у них и недостатки: высокие требования к пусковому току, сложная регулировка оборотов, низкий коэффициент мощности и др.
Здесь стоит отметить, что асинхронные двигатели рассчитаны на работу только с трехфазным напряжением, только в этом случае не требуются никакие преобразователи.
Однако, в быту часто требуется запитать асинхронный двигатель от обычной сети переменного тока с одной фазой, и именно здесь кроется основная проблема.
Необходимость использования частотного преобразователя
Есть несколько способов управления асинхронным двигателем, и один из них – регулировка частоты.
Изменяя частоту питающего тока, вы меняете частоту вращения двигателя, можете запустить его или наоборот – остановить.
В качестве преобразователя напряжения наибольшее распространение нашли инверторные схемы. Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками.
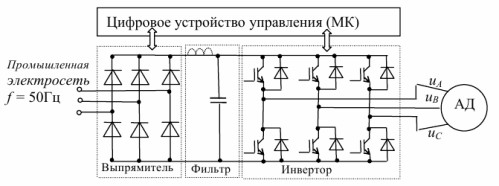
Схему работы инверторов можно изобразить следующим образом.
Рис. 2. Схема работы инверторов
Однофазное переменное напряжение преобразуется в постоянное, подается в блок с импульсным инвертором, который формирует три независимых переменных напряжения (одинакового уровня, но со смещенной фазой) — ключа.
Схема инверторного преобразователя для асинхронного двигателя
Преобразователи можно приобрести в готовом виде, а можно изготовить своими руками.
Сложность проектирования и создания таких схем заключается в логике их работы. В настоящее время с приходом программируемых контроллеров Arduino и т.п. имеется возможность создавать сложные схемы с широким диапазоном регулировки частот всех трех питающих напряжений. Однако, для начала рассмотрим простые варианты.
Двигатель ДИД-0.5ТА (напряжение питания около 27 В, частота вращения – до 400 Гц) имеет небольшую мощность и широко применяется в системах автоматики. Чтобы привести его в движение и отрегулировать частоту вращения вала можно использовать следующую схему.
Рис. 3. Схема двигателя
По сути она представляет собой три разделенных генератора частоты (ключа) на базе логических элементов.
За регулировку отвечает резистор R2. Такая схема не подойдет для запуска асинхронных двигателей, работающих от трехфазного напряжения 380 В.
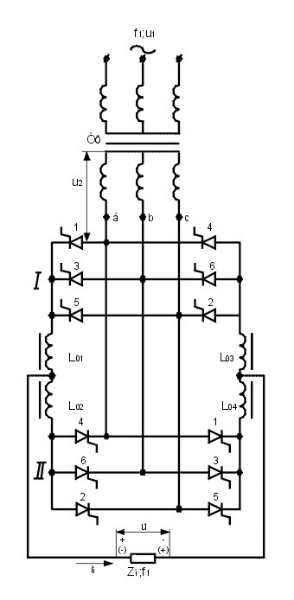
Для этих целей можно использовать адаптированную схему.
Рис. 4. Адаптированная схема
Здесь блоки выходных ключей A2 и А3 изображены схематично, так как полностью дублируют блок А1.
Программировать здесь ничего не нужно.
Более сложные реализации
Многие производители предлагают специальные контроллеры, на базе которых управление асинхронными двигателями существенно упрощается.
Один из таких вариантов – контроллер MC3PHAC.
Рекомендуемая производителем схема подключения.
Рис. 5. Схема подключения
Реализация платы частотного преобразователя может быть, например, такой.
Рис. 6. Реализация платы частотного преобразователя
Обмен данными по последовательному интерфейсу RS232 с персональным компьютером не обязателен. Схема может работать автономно.
Управляющие сигналы и процедуры инициализации можно уточнить в даташите производителя.
Еще один вариант с готовой прошивкой для микроконтроллера
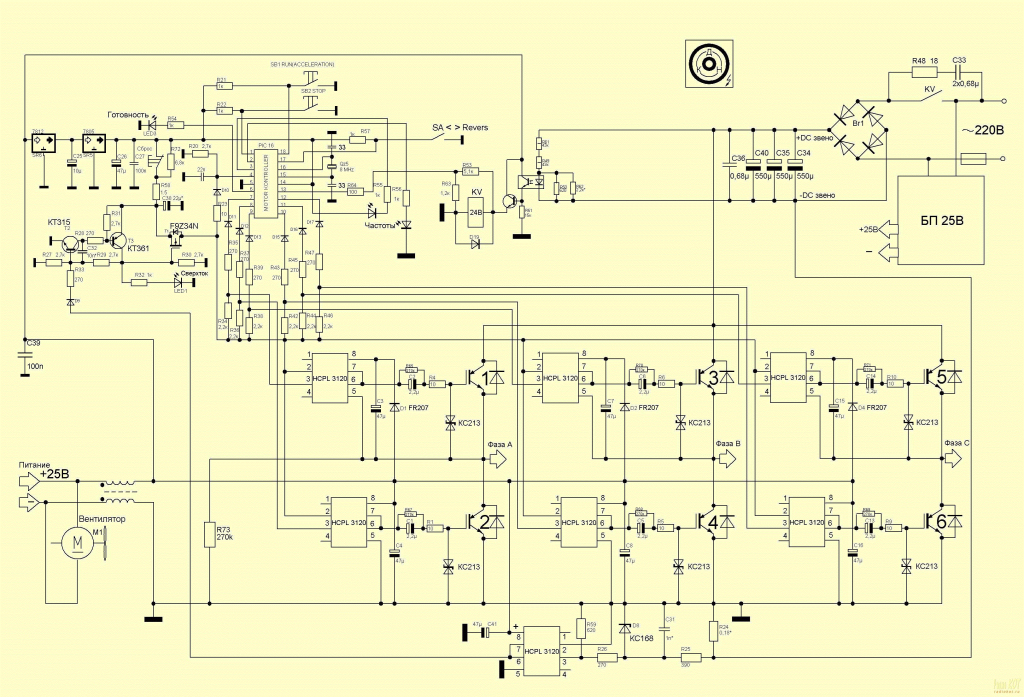
Схема использовалась для питания трехфазного двигателя на пилораме (наверное, самый популярный способ использования трехфазных двигателей).
Рис. 7. Схема для питания трехфазного двигателя
Блок питания к ней.
Рис. 8. Схема блока питания
Вариант печатной платы.
Рис. 9. Печатная плата
Частота может регулироваться в диапазоне 2,5-50 Гц с шагом 1,25. ШИМ – 1700 – 3300 Гц. Мощность двигателя – не более 4 кВт.
После одиночного короткого нажатия на кнопку «пуск» подается пусковая частота – 10 Гц. А удерживание инициирует дальнейший разгон до 50 Гц (в течении приблизительно 2 секунд).
Прошивка для контроллера PIC16F628(A) здесь.
Мнения читателей
Приветствую! Нашел в интернете сайт с интересными видео. Прикольно. Советую Как заработать на Телеграм канале в 2020 — Раскрутка и Монетизация Telegram канала с нуля @@-=
Александрррррр / 27.10.2020 — 17:14
Здравствуйте! Буду очень признателен, если кто-нибудь подскажет, есть ли ссылка на скачивание данной схемы в хорошем качестве? (На PIC — контроллере)
Андрей Рославцев / 21.10.2020 — 20:42
Добрый вечер. Пришлите. пожалуйста схему на электронный адрес nata.roslavceva@mail.ru т.к. плохо видно значения элементов на схеме. Заранее спасибо.
Дмитрий / 16.10.2019 — 18:34
Здравствуйте,а можно какой-нибудь список элементов и т.д?Просто на фотографии плохо видно.
admin / 07.10.2019 — 16:05
admin / 07.10.2019 — 15:12
Да, есть проблема, проверим, поправим, на почту архив вышлем. Спасибо.
Сергей / 07.10.2019 — 14:21
Если возможно прошу указать другой адрес прошивки или выслать файл в по личку. При обращении к ссылке указанной Вами выше — выдается сообщение о Зараженности данного ресурса вирусо.По содержанию статьи- ОЧЕНЬ ПОДРОБНО И СОДЕРЖАТЕЛЬНО. Вам РЕСПЕКТ.Сергей.vitrilo@mail.ru
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Частотный регулятор скорости для асинхронного двигателя
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части.
Асинхронный двигатель – самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин – постоянная скорость вращения вала. Ее регулировку осуществляют:
- Механическим способом. Для этого вал подключают к редукторам, муфтам и другим устройствам.
- Путем изменения числа пар полюсов, величины или частоты питающего напряжения обмоток статора.
Механическое регулирование усложняет кинематическую схему электропривода, ведет к потерям мощности и нерациональному расходу электроэнергии.
Наиболее перспективный метод регулирования уголовной скорости ротора – преобразование частоты питающего напряжения. Этот способ обеспечивает сохранение механических характеристик во всем диапазоне и обладает рядом других преимуществ.
Устройство и принцип работы частотного регулятора
Принцип частотного регулирования основан на зависимости угловой скорости вращения ротора от частоты напряжения на обмотках статора. С появлением IGBT-транзисторов и GTO-тиристоров наибольшее распространение получила схема преобразования частоты на базе широтно-импульсного модулятора.
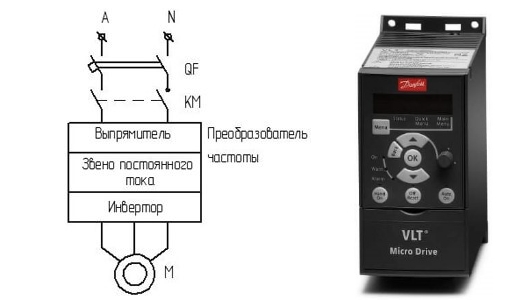
Такие преобразователи частоты состоят:
- Из силового выпрямителя с С или LC фильтром для сглаживания пульсаций.
- Из инвертора на IGBT-транзисторах для преобразования постоянного напряжения в переменное, заданной частоты и амплитуды.
- Из блока управления для генерации отпирающих силовые транзисторы импульсов.
Переменное напряжение выпрямляется и преобразуется в постоянное, затем снова инвертируется в переменное. Частота на силовом выходе ПЧ определяется длительностью отпирающих силовые транзисторы импульсов, поступающих со схемы управления.
Такой способ регулирования позволяет изменять частоту и амплитуду напряжения в силовой цепи электродвигателя, а значит управлять скоростью вращения ротора и моментом на валу электрической машины.
Структура частотного регулятора
Большинство частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они позволяют моделировать напряжение питания необходимой формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
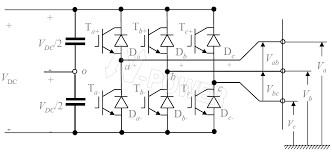
К недостаткам такой схемы является ограничение величины выходного напряжения, которое определяется максимальным напряжением полупроводниковых устройств.
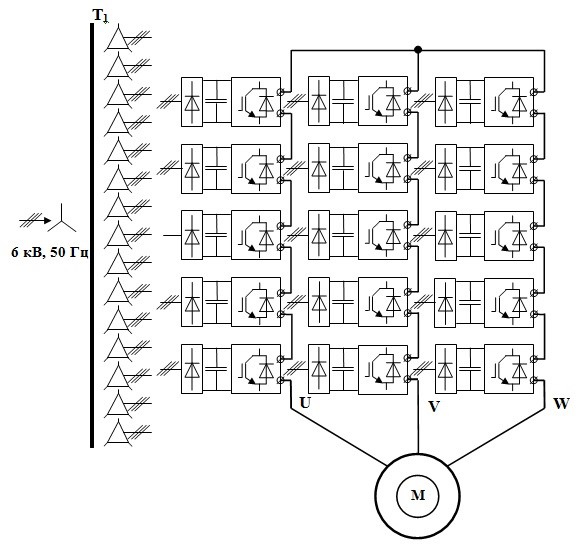
Для высоковольтных приводов используются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Такая схема позволяет избежать резонансов, обеспечивает высокое быстродействие, снижает скорость нарастания напряжения. Такие ПЧ имеют модульную конструкцию. При выходе из строя одной из ячеек, ее легко заменить. К недостаткам этой схемы относятся необходимость отдельного источника питания для каждого модуля, функции которого выполняет трансформатор специального назначения.
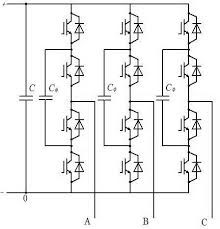
Преобразователи частоты с плавающими конденсаторами позволяют обойтись без входного трансформатора и увеличивать число ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Для регулировки скорости электродвигателей с повторно-кратковременным режимом работы частыми реверсами применяют инверторы тока. Эти устройства представляют собой управляемый выпрямитель и инвертор на тиристорах. Для уменьшения помех в цепи нагрузки в схему включается расщепленный индуктивный фильтр. Выходное напряжение таких устройств имеет форму аппроксимированной синусоиды. Для сглаживания его формы обязательно включение перед электродвигателем конденсаторов. Главное достоинство таких ПЧ – возможность рекуперации электроэнергии обратно в электросеть.
Прямые преобразователи частоты не содержат конденсаторов. Главное их преимущество – небольшие габариты и значительная мощность нагрузки. Такие устройства используются в составе мощных электроприводов работающих на низких скоростях. ПЧ этого типа выполнены на базе тиристорных преобразователей. На входе прямых ПЧ установлен фазосдвигающий трансформатор, устраняющий низшие гармоники и выполняющий функцию источника питания для каждого преобразователя. Прямые ПЧ требуют сложной схемы управления.
Состав частотных преобразователей
Кроме выпрямителя, ШИМ-модулятора и инвертора, в состав частотного преобразователя входят:
Устройство для ввода данных и обмена информаций с ПК, другими частотными преобразователями.
- Встроенная энергонезависимая память. В этом устройстве фиксируются аварийные отключения, изменения настроек, а также другие данные.
- Управляющий контроллер, обеспечивающий реализацию алгоритмов управления, обработку данных с датчиков, защитное отключение при ненормальных режимах работы.
- ЭМ-фильтр. Это устройство обеспечивает снижение реактивной высокочастотной составляющей, снижающей качество электроэнергии и отрицательно влияющей на работу электродвигателя.
- Вентилятор и радиатор для принудительного охлаждения и отвода тепла силовых транзисторов.
- Тормозной прерыватель и другие элементы.
Кроме аппаратной части, преобразователи частоты содержат программное обеспечение. Контроллеры с открытой логикой позволяют вносить изменения в стандартное ПО, поставляемое производителем, и самостоятельно программировать ПЧ.
Однофазные преобразователи частоты
Однофазные асинхронные электродвигатели широко применяются в качестве приводов насосных агрегатов, вентиляторов, маломощных станков. Для регулирования частоты вращения этих электрических машин применяются 2 основных способа:
- Изменение величины напряжения питания.
- Изменение частоты питающего напряжения.
Для регулирования питающего напряжения применяются трансформаторные, автотрансформаторные, тиристорные, симисторные и транзисторные преобразователи. Изменение частоты вращения путем регулирования напряжения имеет ряд серьезных недостатков:
- Увеличение скольжения и сильный нагрев обмоток статора.
- Узкий диапазон регулирования.
Кроме того, постоянная составляющая питающего напряжения на выходе тиристорных и симисторных устройств вызовает увеличение шума при работе, рывки и другие нежелательные явления.
Частотное регулирование лишено этих недостатков. Однофазные ПЧ применяются в холодильном оборудовании, системах вентиляции, бытовых насосах.
Такие электроприводы обеспечивают:
- Стабильную работу однофазного двигателя при любой частоте вращения.
- Снижение потребления электроэнергии.
- Возможность автоматической регулировки частоты вращения с обратной связью по изменению одного или нескольких технологических параметров.
- Удаленное управление и контроль характеристик.
- Защиту от ненормальных режимов работы и коротких замыканий.
- Интеллектуальное управление электродвигателем в соответствии с заданным алгоритмом.
- Возможность пуска без фазосдвигающего элемента.
- Поддержание необходимого момента на валу во всем диапазоне изменения скорости.
Кроме базовых составляющих, в состав однофазного преобразователя частоты входят ПИД-регулятор, ПЛК-контроллер, устройство для обмена данными с удаленным оборудованием, пульт дистанционного управления. При введении дополнительных настроек допустимо применение трехфазного ПЧ для однофазных двигателей переменного тока.

Таким образом, управление однофазными и трехфазными асинхронными электродвигателями путем изменения частоты значительно превосходит метод регулирования величины напряжения, механические способы.
Частотник своими руками – любительская схема преобразователя

Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора. Преобразователь частоты легко решает эту задачу.
Частотник электромотора с тремя фазами по-разному называют: инвертор, частотный изменитель тока, приводной механизм, регулируемый частотой. Сегодня такие устройства делают разные заводы, но многие умельцы своими руками изготавливают не хуже.
Как я сам изготовил частотный преобразователь
Я изготовил преобразователь частоты и асинхронный привод для моего товарища. Ему нужен был привод для пилорамы, мощный и хороший. Так как я любил заниматься электроникой, то сразу предложил ему такую схему:
Трехфазный мост на транзисторах с диодами обратной связи я использовал, которые имелись. Управление осуществил через оптодрайвер HCPL 3120 микроконтроллером PIC16F628A. У входа припаял гасящую емкость, чтобы электролиты заряжались плавно. Затем припаял шунтовое реле. Еще установил триггер защиты тока от замыкания и перегрузки. Для управления установил две кнопки и выключатель для обратного вращения.
Силовую часть я собрал на навесном монтаже.
Резисторы, соединил параллельно по 270 кОм с помощью затворных проходных конденсаторов, позади платы их напаял. Моя плата показана на внешнем виде:

Вид этой моей платы с другой стороны:

Для подключения питающего напряжения я собрал блок питания, работающий на импульсах, обратноходовой. Вот привожу схему этого блока питания:

Как я запрограммировал микроконтроллер? Простые моргалки для меня не представляли какой-то проблемы. Получились константы в виде матрицы, над которой работал мой контроллер. Частота и напряжение были заданы этими величинами. Всю схему работы проверил на моторчике вентилятора небольшой мощности, 200 Вт. Эта моя конструкция выглядела так:

Начальные эксперименты дали хороший результат. Затем доработал программу. Раскрутил двигатель на 4 кВт, и пошел собирать управление пилорамой.
При монтаже у нас с товарищем случайно произошло замыкание и сработала защита, проверили ее работу. Мотор на 2 кВт 1500 оборотов с легкостью пилил доски. Сейчас программа еще дорабатывается для раскрутки двигателя выше номинала. Характеристики: частота от 2 до 50 герц с шагом 1,5 герц, синхронная частота, постоянно меняется, разбег от 1500 до 3500 герц, управление скалярного типа U/F, мощность мотора до 5 кВт.
Удерживаем кнопку RUN и разгоняем двигатель. Отпускаем, частота держится на уровне. Когда загорается светодиод, то привод готов к запуску.
Как сделать инвертор самому своими руками?
Вместе с производством заводских инверторов любители делают их сами, своими руками. Здесь нет ничего сложного. Такой преобразователь частоты преобразовывает одну фазу, делает из нее три фазы. Электродвигатель с похожим частотником используют в домашних условиях, мощность его не будет теряться.

Блок выпрямления в схеме расположен в начале. Далее идут фильтры, которые отсекают токовые переменные. Чтобы изготовить данные инверторы применяют транзисторы IGBT.
За тиристорами стоит будущее, хотя и в настоящем они уже применяются давно. Купленный частотник на биполярных транзисторах стоит дорого и мало где применяется (сервоприводы, металлорежущие станки с векторным управлением). Эти приводы как транспортеры и конвейеры, карусельные станки, станции подкачки воды, климатические системы управления – это большая часть от всего применения устройств заводов, где лучше использовать частотники для управления электромоторами с короткозамкнутыми якорями и можно делать управление оборотами двигателя, если подать потенциал, изменяя частоту до 50 герц.
Приведем простые примеры частотных преобразователей, которые тянули мощные электродвигатели тепловозов и электричек, имеющих в своем составе много вагонов товарных платформ, большие станции с насосами напряжением 600 вольт, обеспечивающие городские районы питьевой водой. Очевидно, что данные сильные электродвигатели не подойдут на биполярных транзисторах. Поэтому применяют активные тиристоры типа GTO, GCT, IGCT и SGCT. Они преобразуют из постоянного тока токовую сеть с тремя фазами с хорошей мощностью. Однако, имеются простые схемы на тиристорах простого типа, закрывающиеся током катода обратного. Такие тиристоры не будут действовать в режиме ШИМ, их хорошо применяют в прямой регулировке электромоторов, без тока постоянного размера. Преобразователи частоты на тиристорах в застойные времена были задействованы для моторов на постоянном токе. Фирма Сименс изобрела векторные частотники, преобразившие промышленность до неузнаваемости.
Стоимость всех деталей самодельного инвертора существенно ниже цены заводского устройства.
Такие самодельные устройства хорошо подходят для электромоторов мощностью до 0,75 кВт.
Для чего предназначен инвертор – его принцип действия
Инвертор действует на частоту вращения асинхронных моторов. Моторы переделывают электроэнергию в механическое движение. Вращательное движение преобразуется в движения механические. Это создает большое удобство. Асинхронные моторы очень популярны во многих сторонах жизни людей.
Обороты электродвигателя можно изменять и другими устройствами. Но, у них много недостатков. Они сложны в пользовании, дорого стоят, работают с плохим качеством, разбег регулировки маленький.
Частотный преобразователь для мотора с тремя фазами легко решает эту проблему. Все знают, что пользование частотниками для изменения частоты вращения есть самый хороший и правильный метод. Такой аппарат дает мягкий пуск и торможение, а также контролирует многие процессы, происходящие в моторе. Аварийные ситуации при этом сводятся на нет.

Чтобы плавно и быстро регулировать работу двигателя, специалисты разработали специальную электрическую схему. Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Коэффициент полезного действия его достигает 98%. Это происходит за счет повышения частоты коммутации. Механические устройства не могут выполнить такие функции.
Как регулировать скорость инвертором?
Как частотник может изменять частоту вращения трехфазного электромотора? Сначала он меняет напряжение сетевое. Далее, из него получается нужная амплитуда и частота напряжения, поступает на электромотор.
Разбег интервала регулирования скорости преобразователем большой. Можно изменять вращение мотора в другую сторону. Чтобы двигатель не вышел из строя, нужно брать во внимание данные из его характеристики, допускаемые обороты, мощность.
Из чего состоит привод регулирования?

Он имеет в составе три звена:
- выпрямитель, дающий потенциал постоянного тока при включении к питанию электрической сети. Сеть может быть управляемой или нет;
- фильтрующий элемент, который сглаживает выходное напряжение (применяется емкость);
- инвертор, который производит нужную частоту потенциала, крайнего звена возле электромотора.
Режим управления частотников
Их делят на виды управления оборотами двигателя:
- скалярное управление (нет связи с обратной стороны);
- режим векторного управления (связь с обратной стороны имеется, или отсутствует).
В первом случае управляется статор с его магнитным полем. Управление вектором учитывает действие полей магнита ротора и статора, улучшается крутящий момент при разных скоростях вращения. Это и есть основное различие их режимов управления.
Способ векторов точнее и эффективнее. Обслуживать его дороже. Он больше подходит для специалистов с хорошими профессиональными умениями и знаниями. Метод управления скалярного типа наиболее прост в работе. Применяется он с выходными параметрами, не требующими регулировки особой точности.
Как подключить инвертор треугольником и звездой?
Когда мы купили инвертор по недорогой цене, то возникает необходимость: подключение его к электромотору самому без специалистов. Сначала надо установить для безопасности автоматический выключатель для обесточивания. Если возникнет короткое замыкание на фазах, то отключится вся система.
Подключить частотник к мотору можно звездой или треугольником.

Когда привод регулирования с одной фазой, то контакты электромотора присоединяют треугольником. Тогда мощность не потеряется. Мощность этого преобразователя частоты будет не более 3 кВт.
Инверторы с тремя фазами технически наиболее современны. Они питаются от заводских трехфазных сетей, подключаются звездой.
Для ограничения тока пуска и уменьшения момента пуска при пуске электромотора свыше 5 кВт можно использовать способ включения треугольник и звезда.
При включении статора применяется схема звезды, а если обороты двигателя нормальные, то переходят на вариант треугольника. Но это используется при существовании возможности соединения по двум схемам.
Отмечаем, что в варианте звезда-треугольник большие перепады тока будут всегда. При переключении на вторую схему обороты двигателя сильно снизятся. Для восстановления скорости вращения надо повысить силу тока.
Большой применяемостью оказывают пользу частотники для моторов мощностью до 8 кВт.
Применение инверторов нового поколения
Современные частотные преобразователи делаются с применением таких устройств как микроконтроллеры. Это значительно повышает функции инверторов в алгоритмах управления и контролирования с точки зрения безопасности работ.
Частотники имеют успешное применение в областях производства:
- в водоснабжении, снабжении теплом при изменении скорости подачи помпы холодного и горячего водоснабжения;
- в заводских условиях машиностроения;
- в легкой и текстильной промышленности;
- в энергетике и производстве топлива;
- для насосов канализации и скважин;
- в технологических процессах для автоматики управления.
Чтобы управлять и контролировать частотники изготовитель прибора предлагает созданную программу, которая будет всегда иметь связь с контроллером посредством порта, будет показывать на мониторе состояние и позволит производить управление. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров.
Данные обмениваются в три этапа:
- Идентификация.
- Инициализация.
- Управление и контроль.
Стоимость блоков питания бесперебойного напряжения имеет зависимость от того, есть ли в нем частотный преобразователь. За такими устройствами будущее. Отрасли экономики и энергетики будут быстрее развиваться благодаря новым современным устройствам.







