- Частотный преобразователь — виды, принцип действия, схемы подключения
- Преобразователи частоты
- Виды преобразователей частоты
- Электромашинные частотники.
- Электронные преобразователи.
- Непосредственные преобразователи частоты
- Плюсы непосредственных преобразователей частоты:
- Минусы непосредственных преобразователей частоты:
- Преобразователи частоты с промежуточным звеном постоянного тока.
- Плюсы преобразователей с промежуточным звеном постоянного тока:
- Минусы преобразователей с промежуточным звеном постоянного тока:
- Устройство преобразователей с промежуточным звеном постоянного тока
- Способы управления преобразователем
- ЧП со скалярным управлением
- ЧП с векторным управлением
- Режимы управления частотными преобразователями
- 1) Ручное управление.
- 2) Внешнее управление.
- 3) Управление по дискретным входам или “сухим контактам”.
- 4) Управление по событиям.
- Преимущества частотных преобразователей.
- 1) Экономия электроэнергии.
- 2) Увеличение срока службы промышленного оборудования.
- 3) Отсутствие необходимости проводить техническое обслуживание.
- 4) Возможность удаленного управления и контроля параметров оборудования с электроприводом.
- 5) Широкий диапазон мощности двигателей.
- 6) Защита электродвигателя от аварий и аномальных режимов работы.
- 7) Снижение уровня шума работающего двигателя.
- Сферы применения
Частотный преобразователь — виды, принцип действия, схемы подключения
 Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.
Виды частотных преобразователей
По конструкции частотные преобразователи бывают:
1. индукционного типа;
Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью. Поэтому они не нашли широкого применения в производстве и используются крайне редко.
Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин. При этом может быть реализован один из двух принципов управления:
1. по заранее заданной характеристике зависимости скорости вращения от частоты (V/f);
2. метод векторного управления.
Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования.
Особенности векторного управления частотным преобразованием
Отличием этого способа является взаимодействие, влияние устройства управления преобразователя на «пространственный вектор» магнитного потока, вращающийся с частотой поля ротора.
Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:
1. бессенсорного управления;
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции (ШИМ) инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.
Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом.
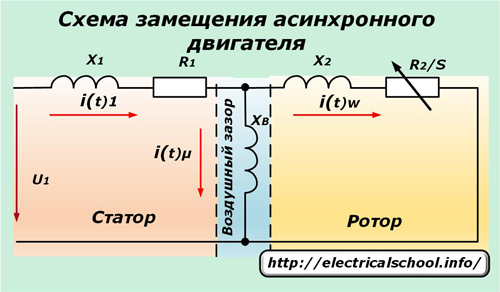
На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1. Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление.
Векторная диаграмма схемы замещения
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя.
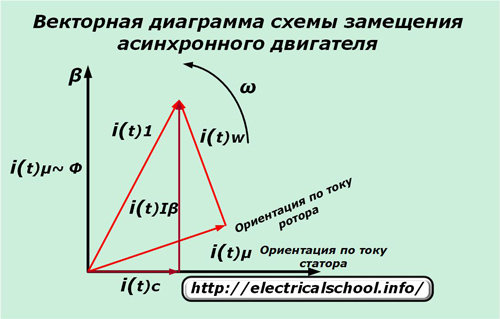
Энергия тока статора разделяется на две части:
iµ — потокообразующую долю;
iw — моментообразующую составляющую.
При этом ротор обладает активным сопротивлением R2/s, зависящим от скольжения.
Для бессенсорного управления измеряются:
По их значениям рассчитывают:
iµ — потокообразующую составляющую тока;
iw — моментообразующую величину.
В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали.
Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя.
Принцип работы частотного преобразователя
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети.
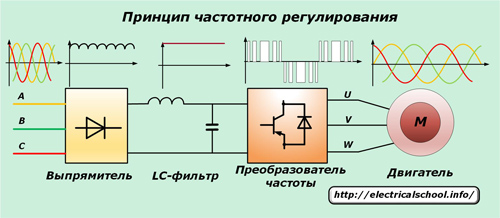
Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью (LC-фильтр), обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами.
Для включения режима «торможения» двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим энергию. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
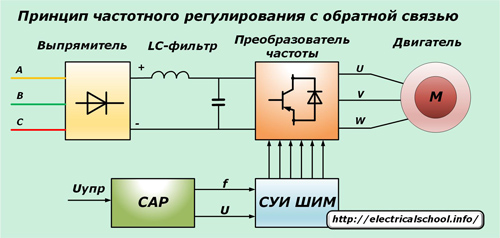
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:
2. ШИМ (широтного импульсного моделирования).
Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя.
Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида.
![]()
Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
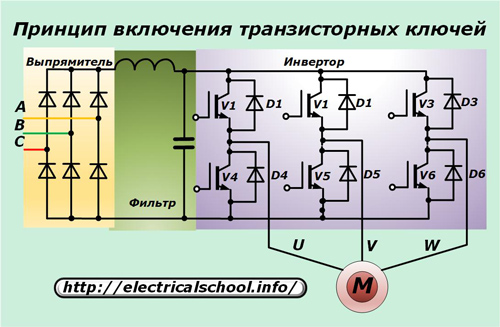
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды.
Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр, ликвидирующий:
наводимые работающим оборудованием электрические разряды.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора.
С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:
ввода связи с расширенными возможностями интерфейса;
информационный Led-дисплей, отображающий основные выходные параметры;
тормозной прерыватель и встроенный ЭМС фильтр;
систему охлаждения схемы, основанную на обдуве вентиляторами повышенного ресурса;
функцию прогрева двигателя посредством постоянного тока и некоторые другие возможности.
Эксплуатационные схемы подключения
Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением 220 вольт, то от них тоже можно запитывать инверторы.

Трехфазные модели рассчитываются на напряжение сети 380 вольт и выдают его на электродвигатель. Однофазные же инверторы питаются от 220 вольт и на выходе выдают три разнесенных по времени фазы.
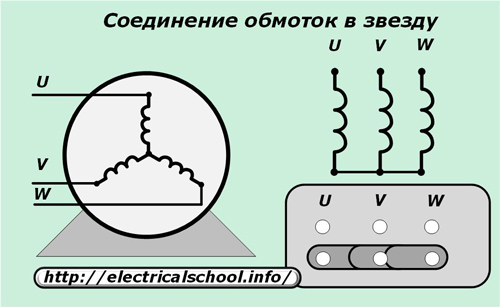
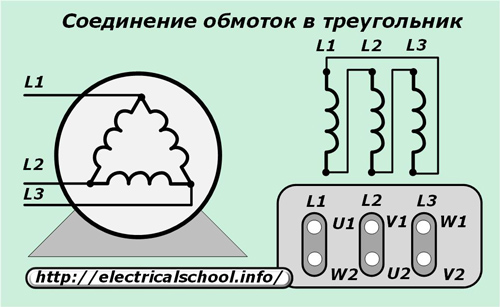
Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:
Обмотки двигателя собираются в «звезду» для преобразователя, запитанного от трехфазной сети 380 вольт.
По схеме «треугольник» собирают обмотки двигателя, когда питающий его преобразователь подключен к однофазной сети 220 вольт.
Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу.
Преобразователи частоты
В данной статье мы рассмотрим что такое частотный преобразователь, сферы применения преобразователей частоты, их плюсы и минусы, а также схемы частотников.
Преобразователи частоты (или частотники) – электротехническое оборудование для регулирования частоты переменного напряжения. Основная сфера применения этих устройств – изменение частоты вращения и крутящего момента электрических машин асинхронного типа. Принцип действия управления и регулирования основан на зависимости скорости вращения магнитного поля от частоты питающего напряжения.
Асинхронные электродвигатели широко используются в качестве приводов промышленного оборудования, насосных агрегатов, регулирующей арматуры и других устройств. Основным недостатком этих электрических машин являются постоянная скорость вращения, большие пусковые токи. При помощи частотных преобразователей возможно устранить эти недостатки и существенно расширить сферу применения электродвигателей переменного тока.
Виды преобразователей частоты
Частотные преобразователи различаются по конструкции, принципу действия, способу управления. По конструктивному исполнению преобразователи частоты разделяют на две большие группы:
Электромашинные частотники.
Электромашинные или индукционные преобразователи частоты представляют собой двигатели переменного тока, включенные в режим генератора. Применяются такие электротехнические устройства относительного редко, в условиях, где затруднено или невозможно применение электронных частотных преобразователей.

Электронные преобразователи.
Полупроводниковые ЧП состоят из силовой части, выполненной на транзисторах или тиристорах, и схемы управления на базе микроконтроллеров. Это электротехническое оборудование пригодно для трехфазных и однофазных приводов любого назначения. Различают ЧП с непосредственной связью с питающей сетью и устройства с промежуточным звеном постоянного тока.

Непосредственные преобразователи частоты
Такие частотники построены на базе быстродействующих тиристорных преобразователей, включенных по мостовым, перекрестным, нулевым и встречно-параллельным схемам.
Устройства такого типа включаются непосредственно в питающую сеть.
Плюсы непосредственных преобразователей частоты:
- Возможностью рекуперации электроэнергии в сеть при работе в режиме торможения двигателя. Непосредственное включение обеспечивает двусторонний обмен электричеством.
- Высоким к.п.д. за счет однократного преобразования частоты.
- Возможностью наращивания мощности за счет присоединения дополнительных преобразователей.
- Широким диапазоном низких частот. Непосредственные преобразователи обеспечивают стабильную работу привода на малых скоростях.
Минусы непосредственных преобразователей частоты:
- Аппроксимированная форма выходного напряжения с наличием постоянных составляющих и субгармоник. Такая форма переменного напряжения на выходе устройства вызывает дополнительный нагрев двигателя, снижает момент, создает помехи.
- Частота напряжения на выходе преобразователя не превышает аналогичную характеристику сетевого напряжения. Таким образом, при помощи этих устройств можно только снижать скорость вращения двигателей.
- Основная сфера непосредственных преобразователей – электроприводы на базе асинхронных и синхронных двигателей большой и средней мощности.
Преобразователи частоты с промежуточным звеном постоянного тока.
Частотные преобразователи этого типа выполнены на базе схемы двойного преобразования. Питающее сетевое напряжение преобразуется в постоянное, затем сглаживается и инвертируется в переменное выходное напряжение заданной частоты.
Плюсы преобразователей с промежуточным звеном постоянного тока:
- Возможностью получения выходного напряжения с частотой как выше, так и ниже аналогичного параметра сети питания. Частотники на базе схемы двойного преобразования используют для высоко- средне- и низкоскоростных электроприводов.
- Чистой синусоидальной формой напряжения на выходе. Схема преобразователя позволяет получать переменное напряжение с минимальным отклонением от синусоидальной формы.
- Возможностью построения простых и сложных силовых и управляющих схем для приводов с различными требованиями к скорости реагирования, диапазону скоростей.
- Возможностью адаптации к сетям постоянного тока. Преобразователи данного типа можно приспособить для питания от резервных и аварийных источников постоянного тока без дополнительных устройств. Это позволяет применять такие частотники в приводах ответственного оборудования с резервными источниками электроэнергии.
- Разнообразием алгоритмов управления. Преобразователи со звеном постоянного тока можно запрограммировать и адаптировать практически ко всем электроприводам, в том числе и претенциозным, где требуется особо точное регулирование скорости и момента.
Минусы преобразователей с промежуточным звеном постоянного тока:
- Относительно большую массу и габариты, что обусловлено наличием выпрямительного, фильтрующего и инверторного блоков.
- Повышенные потери мощности. Схема двойного преобразования несколько уменьшает общий к.п.д.
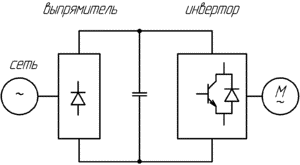
Устройство преобразователей с промежуточным звеном постоянного тока
Состоят такие преобразователи из нескольких основных блоков:
- Выпрямителя. Для ЧП используются диодные и тиристорные преобразователи постоянного тока. Первые отличаются высоким качеством постоянного напряжения практически с полным отсутствием пульсации, низкой стоимостью и надежностью. Однако диодные выпрямители не позволяют реализовать возможность рекуперации электроэнергии в сеть при торможении двигателя. Выпрямители на тиристорах обеспечивают возможность протекания тока в обоих направлениях и позволяют отключать преобразователь от сети без дополнительной коммутирующей аппаратуры.
- Фильтра. Выходное напряжение тиристорных управляемых выпрямителей имеет значительную пульсацию. Для ее сглаживания используют реакторы, емкостные или индуктивно-емкостные фильтры.
- Инвертора. В ЧП используют инверторы напряжения и тока. Последние обеспечивают рекуперацию электроэнергии в сеть и применяются для управления электрическими машинами с частым пуском, реверсом и остановкой, например, крановыми двигателями.
- Частотники на базе инверторов напряжения выдают на выходе напряжение формы “чистый синус”. Благодаря этому преобразователи такого типа получили наиболее широкое распространение.
- Микропроцессора. Этот блок осуществляет управление входным выпрямителем, прием и обработку сигналов с датчиков, взаимодействие с автоматизированной системой высшего уровня, запись и хранение информации о событиях, формирует выходное напряжения ЧП соответствующей частоты. А также выполняет функции защиты от перегрузок, обрыва фазы и других аварийных и ненормальных режимов работы.
Способы управления преобразователем
По принципу управления различают 2 основных вида частотных преобразователей:
ЧП со скалярным управлением
Частотники этого типа выдают на выходе напряжение определенной частоты и амплитуды для поддержания определенного магнитного потока в обмотках статора. Частотники с таким принципом регулирования отличаются относительно низкой стоимостью, простотой конструкции. Нижний предел регулировки скорости составляет около 10 % от номинальной частоты вращения. Их можно использовать для управления сразу несколькими двигателями. Скалярные ЧП используют для приводов насосных агрегатов, вентиляторов и других устройств и оборудования, где не требуется поддерживать скорость вращения ротора вне зависимости от нагрузки.
ЧП с векторным управлением
Микропроцессорные устройства преобразователей с векторным управлением автоматически вычисляют взаимодействие магнитных полей статора и ротора. ЧП такого типа обеспечивают постоянную частоту вращения ротора вне зависимости от нагрузки. Они используются для оборудования, где необходимо поддерживать необходимый момент силы при низких скоростях, высокое быстродействие и точность регулирования. Применение векторных ЧП позволяет регулировать частоту вращения, задавать требуемый момент на валу.
ЧП с векторным управлением делятся на преобразователи бездатчикового типа и устройства с обратной связью по скорости. Последние используются для приводов с широким диапазоном регулирования скорости до 1:1000, необходимости позиционирования точного положения вала, регулирования момента при низких скоростях, точного поддержания частоты вращения, пуска двигателя с номинальным моментом. Преобразователи без датчика скорости применяют для приводов с более низкими требованиями.
Режимы управления частотными преобразователями
В большинстве моделей современных частотных преобразователей реализована возможность управления в нескольких режимах:
1) Ручное управление.
2) Внешнее управление.
3) Управление по дискретным входам или “сухим контактам”.
4) Управление по событиям.

Преимущества частотных преобразователей.
1) Экономия электроэнергии.
2) Увеличение срока службы промышленного оборудования.
3) Отсутствие необходимости проводить техническое обслуживание.
4) Возможность удаленного управления и контроля параметров оборудования с электроприводом.
5) Широкий диапазон мощности двигателей.
6) Защита электродвигателя от аварий и аномальных режимов работы.
7) Снижение уровня шума работающего двигателя.

Сферы применения
Частотно-регулируемые приводы применяют:
- Для кранов и грузоподъемных машин . Крановые двигатели работают в режиме частых пусков, остановок, изменяющейся нагрузки. ЧП обеспечивают отсутствие рывков и раскачивания груза при пусках и остановках, остановку крана точно в требуемом месте, снижают нагрев электродвигателей и максимальный пусковой момент.
- Для привода нагнетательных вентиляторов в котельных и дымососов. Общее управление с плавной регулировкой дутьевых и вытяжных вентиляторов позволяет автоматизировать процесс горения и обеспечить максимальный к.п.д . котельных агрегатов.
- Для транспортеров, прокатных станов, конвейеров, лифтов. ЧП регулирует скорость перемещения транспортного оборудования без рывков и ударов, что увеличивает срок службы механических узлов. Для насосных агрегатов. ЧП позволяют обойтись без задвижек и вентилей, регулирующих давление и производительность, и существенно увеличить общий к.п.д системы водоподачи.
- Для электродвигателей станков. Использование преобразователя частоты вместо коробки передач позволяет плавно увеличивать или уменьшать частоту вращения рабочего органа станка, осуществлять реверс. ЧП широко используются для станков с ЧПУ и высокоточного промышленного оборудования.
Внедрение частотно-регулируемых приводов дает значительный экономический эффект. Снижение затрат достигается за счет сокращения потребления электроэнергии, расходов на ремонт и ТО двигателей и оборудования, возможности использования более дешевых асинхронных электродвигателей с короткозамкнутым ротором, а также сокращения других производственных издержек. Средний срок окупаемости частотных преобразователей составляет от 3-х месяцев до трех лет.







