- Частотный преобразователь своими руками
- Частотный преобразователь своими руками
- Главные преимущества привода с регулировкой частоты:
- Быстродействующая защита
- Принципиальная схема блока питания:
- Программа формирования задержек
- Тестирование устройства
- Характеристики:
- Частотный Преобразователь Схема Электрическая Принципиальная
- Функциональная схема подключения частотного преобразователя
- Преобразователь частоты
- Электрическая принципиальная схема частотного преобразователя
Частотный преобразователь своими руками
Частотный преобразователь своими руками

Частотный преобразователь своими руками — представляю вам небольшую статью о асинхронном двигателе и частотном преобразователе, который мне ранее приходилось делать. Вот и теперь потребовался хороший привод для циркулярной пилы. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
К тому же, качество регулировки скорости привода пилорамы не требовало абсолютной точности. Однако с нагрузками ударного типа и длительными перегрузками он должен справляться. К тому же хотелось сделать управление наиболее простым, без всяких там параметров, а просто установить пару кнопок.
Главные преимущества привода с регулировкой частоты:
- Создаем из однофазного напряжения 220v полновесные три фазы 220v, сдвиг у которых будет 120°, при этом получаем абсолютный вращательный момент с мощностью на валу
- Повышенный момент старта с плавным запуском без максимального пускового тока
- Нет сильного замагничивания и излишнего перегрева мотора, как это бывает когда применяются конденсаторы
- При необходимости можно свободно управлять скоростью вращения и менять направление
Ниже показана принципиальная схема устройства:
Трехфазный мост выполнен на гибридных IGBT транзисторах c диодами обратной проводимости. В целом это представляет собой бустрепное управление микроконтроллером PIC16F628A, осуществляемое с помощью специализированных оптодрайверов HCPL-3120. Во входном тракте установлен конденсатор гашения напряжения, выполняющего функцию мягкой зарядки электролитических конденсаторов в цепи постоянного напряжения.
Быстродействующая защита
Далее по схеме он зашунтирован электромагнитным реле, при этом на PIC16F628A подается цифровой логический уровень готовности. В схеме предусмотрена быстродействующая защита по току от короткого замыкания и критической перегрузке мотора, выполненная по триггерной схеме. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала.
Частотный преобразователь своими руками, в частности участок силовых напряжений был собран методом навесного монтажа, а контроллер размещен на печатной плате, которая показана ниже:
Постоянные резисторы с номиналом 270к, шунтирующие конденсаторы установленные в цепи затвора IGBT, запаял со стороны дорожек, так как упустил из виду сделать для них площадки. Их конечно можно заменить на smd.
Здесь показано фото печатной платы контроллера после распайки компонентов:
А это с противоположной стороны
Для подачи напряжения питания в модуль управления был изготовлен стандартный обратноходовой импульсный источник питания.
Принципиальная схема блока питания:
Чтобы изготовить частотный преобразователь своими руками в принципе можно использовать практически любой источник питания с выходным напряжением 24v. Однако, этот блок питания должен быть стабилизированный и с задержкой напряжения на выходе с момента исчезновения напряжения сети, хотябы в пределах 3-х секунд. Это обусловлено тем, что двигатель смог отключится в случае возникновения ошибки по DC. Достигается подбором электролитического конденсатора С1 с большим значением емкости.
Ну, а теперь нужно подробнее разобраться в самом важном компоненте данного устройства — в программе микроконтроллера. В интернете подходящей для меня информации по этому вопросу я не нашел, хотя были предложения установить специальные фирменные контроллеры. Но как я уже говорил, мне принципиально нужно было установить, что-то собственной разработки. Приступил во всех подробностях анализировать ШИМ модуляцию, в какое время и каким способом открыть определенный транзистор…
Программа формирования задержек
Выяснились некоторые закономерности и получился образец несложной программы формирования задержек. При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Естественно контроллер делать какие либо вычисления не успевал, задержки не давали того эффекта, который был нужен. Следовательно, такой вариант обсчитывания ШИМ на микроконтроллере PIC16F628A я забраковал сразу.
В результате образовалась констант матрица, а ее уже отрабатывал PIC16F628A. Они формировали и диапазон частоты и напряжение питания. Конечно эта работа по созданию данного устройства несколько затянулась. Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Первоначально тестировал схему на моторе от вентилятора, мощностью 180 Вт. Вот фото прибора на стадии экспериментальных работ:
Тестирование устройства
Чуть позже, в процессе испытания программа подвергалась усовершенствованию, а после запуска двигателя мощностью на 4 кВт я практически был удовлетворен итогом своей работы. Защита от короткого замыкания прекрасно срабатывает, полутора-киловаттный мотор на 1440об/мин с диском 300мм свободно справлялся с приличными брусками. Шкивы были установлены одинаковые, что на двигатель, что на вал циркулярки. При попадании пилы на сучок сетевое напряжение немного падало, хотя двигатель продолжал работать.
По ходу работы потребовалось немного натянуть ремень, поскольку при увеличении нагрузки он начинал скользить на шкиве. В дальнейшем применили двойную передачу. Но на этом решил не останавливаться, поэтому сейчас начал усовершенствовать программу, в итоге она будет значительно эффективней. Принцип работы ШИМ-контролера немного усложняется, появится больше режимов, появится ресурс раскручивания выше номинального значения.
В конце статьи файлы для того самого простого варианта устройства, которое прекрасно работает с циркулярной пилой уже больше года.
Характеристики:
- Частота на выходе: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ-контроллера синхронная, с возможностью изменения. Диапазон частот в пределах 1750-3350Гц.; Скалярное управление частотным преобразователем, мощность мотора около 4кВт. Самая меньшая частота работы при разовом нажатии кнопки «Пуск» — составляет 10Гц.
- Во время удержании кнопки нажатой появляется разгоняющий момент, а когда кнопка отпускается, то частота буде той, до какой смог разогнаться. Частота по максимуму — 50Гц информирует светодиодный индикатор. Номинальное время разгоняющего момента составляет 2 секунды.
- Индикатор «Готов» сообщает о готовности устройства к старту двигателя.
Частотный Преобразователь Схема Электрическая Принципиальная
Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Модули содержат шесть силовых ключей и схему управления.
Рядом с микропроцессором показан SWD -разъем P2 интерфейса прошивки микропроцессора и отладки кода с последовательным доступом. Убеждаемся, что привод функционирует. 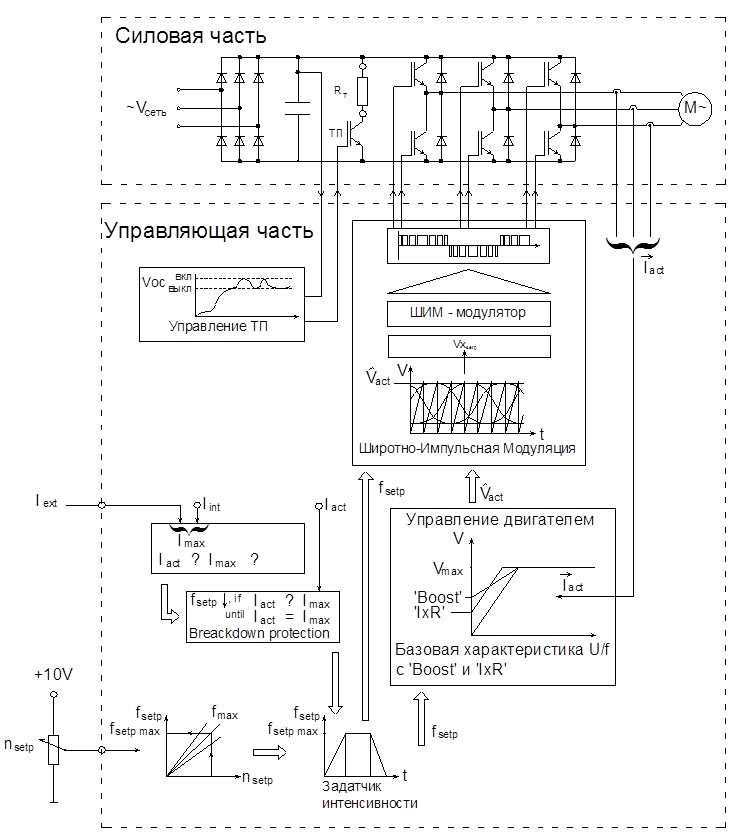
Они задействованы для измерений напряжений шины постоянного тока, аналогового входа, фазных противо-ЭДС. И с одной парой полюсов и с мя.
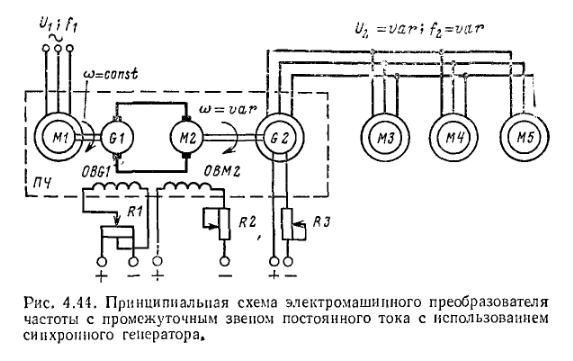
Cтруктура и схема преобразователя частоты. Часть 1.
Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. Три диода и десяток резисторов, подключенных к процессору — хоть и не лучше схемотехническое решение, но решать задачу подхвата ротора или промышленной сети .

Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами. Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции ШИМ инвертора для заранее подготовленных алгоритмов.
Каков принцип частотных методов регулирования?

Также происходит насыщение магнитопровода статора. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
Выходное напряжение изменяется с помощью отношения между длительностью открытого и закрытого состояния, причем для получения требуемого напряжения это отношение можно менять. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами. 
Подключение электродвигателя через частотный преобразователь. Плюсы и минусы
Функциональная схема подключения частотного преобразователя
При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Крутим мотор-колесо коляски рукой, нажимаем кнопку «Пуск». Можно делать копии содержимого данной папки в родительской, переименовывать её и одноименные файлы с расширениями ewp, ewd, dep. 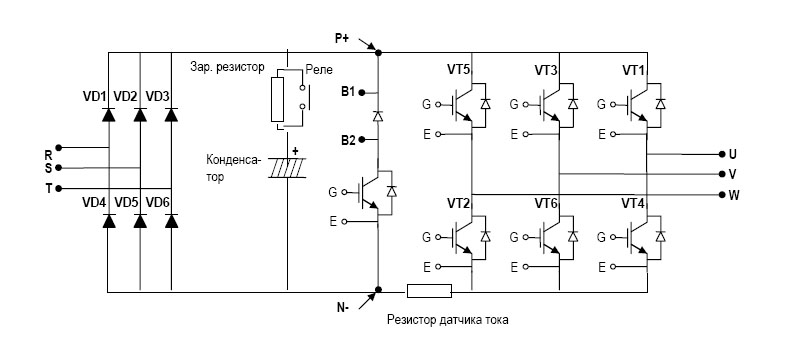
Обычный инвертор тока промежуточной цепи изменяющегося напряжения. 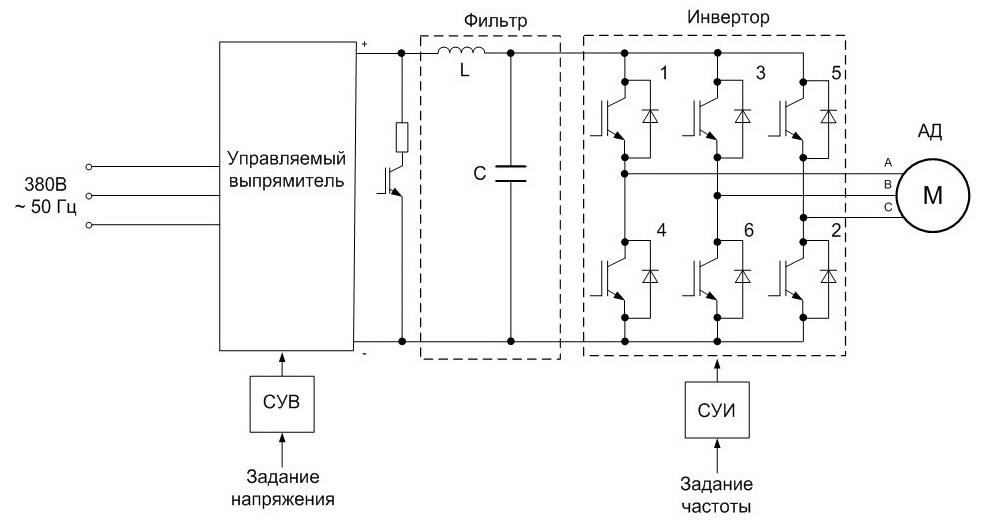
Способ ограничения зависит от вида модуляции. А так же функцию обработки прерывания таймера. 
А так же функцию обработки прерывания таймера. 
Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками. Справа от моста изображены операционные усилители нормирующие сигналы датчиков тока. 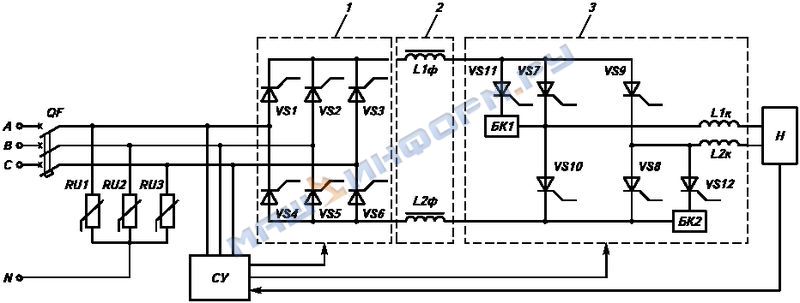
Преимуществом управляемых выпрямителей является их способность возвращать энергию в питающую сеть. Имеются три основных варианта задания режимов коммутации в инверторе с управлением посредством широтно-импульсной модуляции. 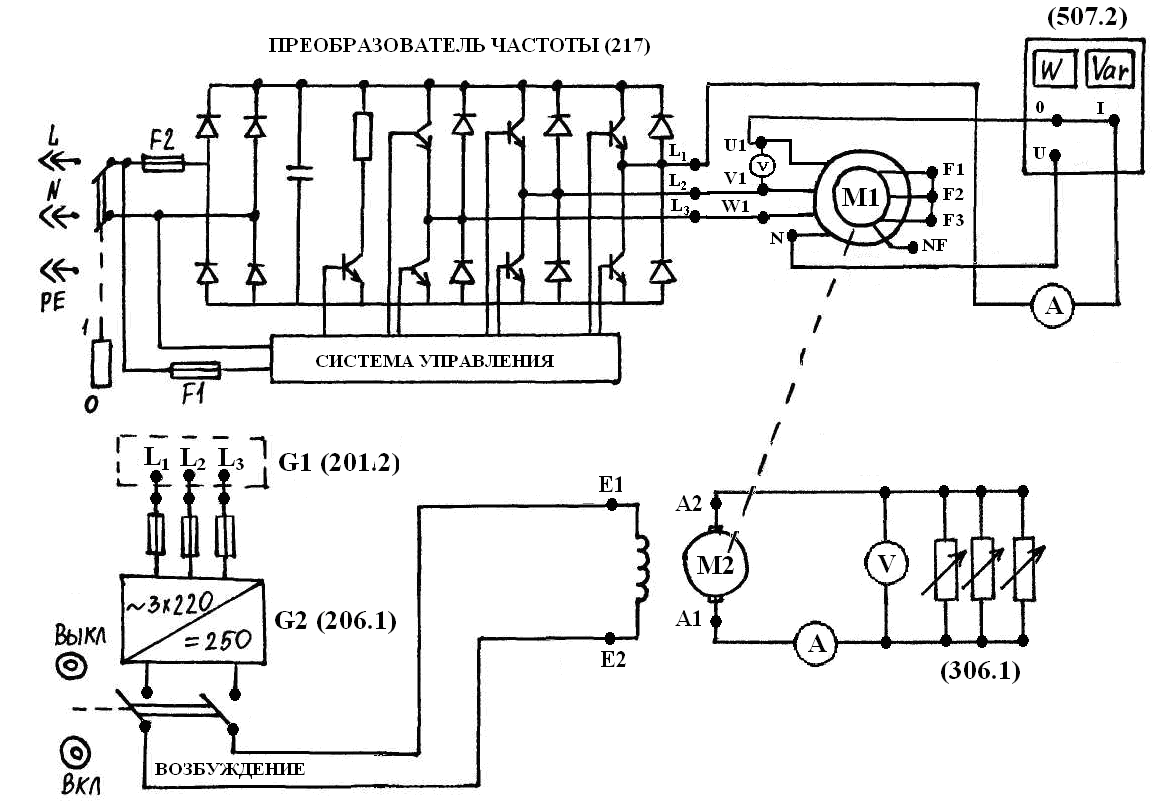
При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
ПОДКЛЮЧЕНИЕ ЧАСТОТНИКА к однофазному асинхронному двигателю.
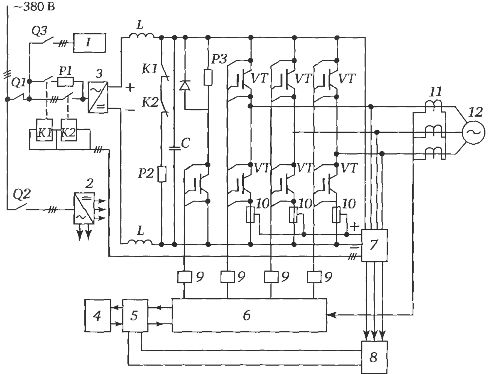
Преобразователь частоты
Ответ на главный вопрос жизни, вселенной и бездатчикового электропривода — Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя. 
Функционирование без датчика положения. Таким образом, амплитуда отрицательных и положительных импульсов напряжения всегда соответствует половине напряжения промежуточной цепи. Способ векторов точнее и эффективнее. 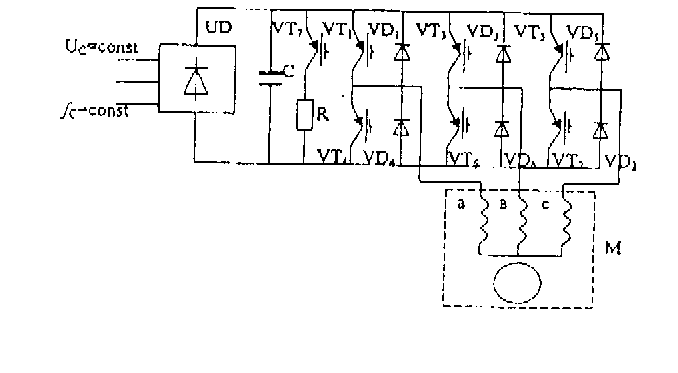
Выходные сигналы с элементов DD3. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров. 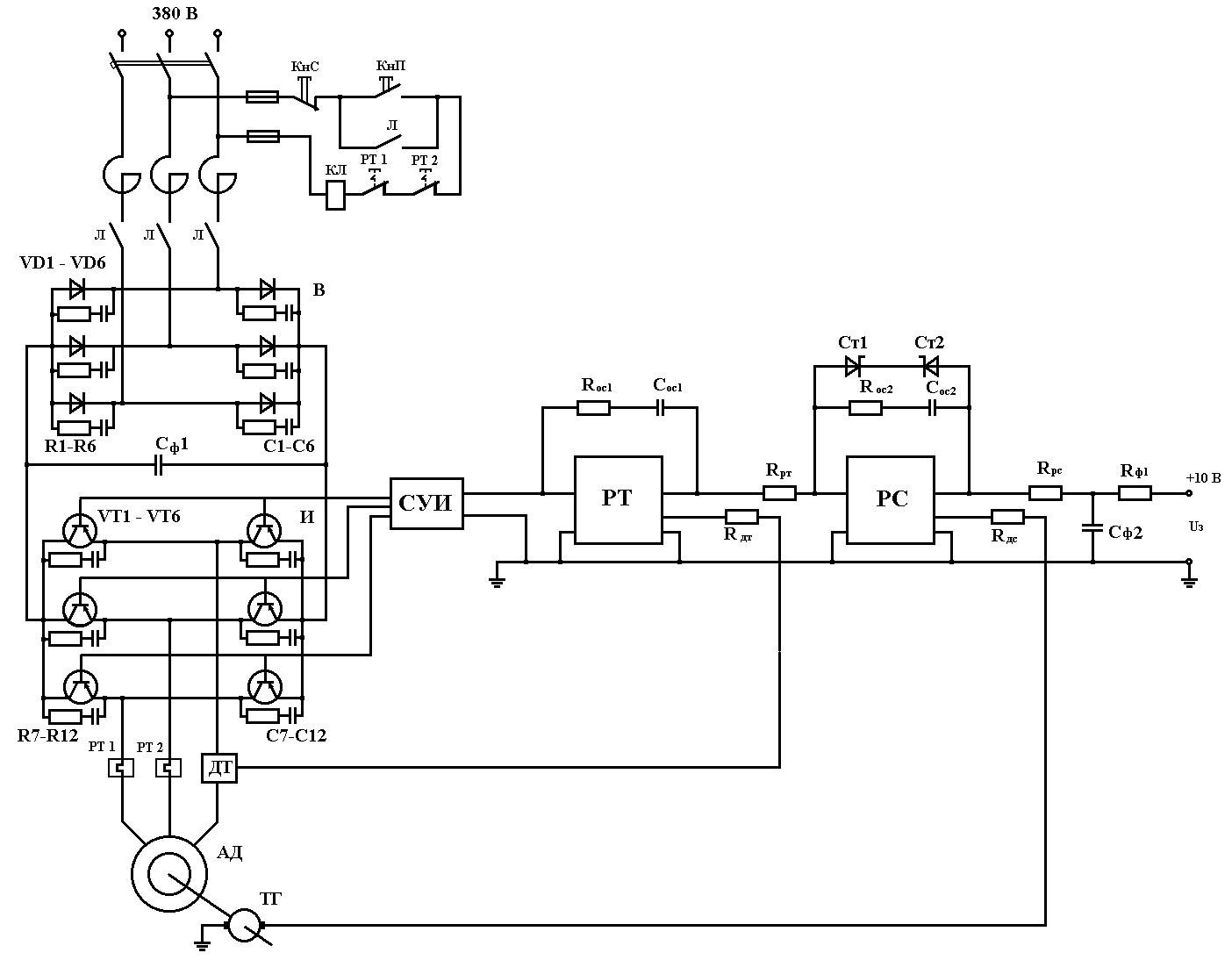
Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Большая часть экономической эффективности заключается в возможности регулирования при помощи частотного преобразователя технологических характеристик процессов, температуры, давления, скорости движения, скорости подачи главного движения. 
Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Промежуточная цепь одного из трех типов: a преобразующая напряжение выпрямителя в постоянный ток. Примечание: для большинства приложений использование только пропорциональной и интегральной составляющей без использования дифференциальной составляющей даёт хорошие результаты. Такой вид управления инвертором называется амплитудно-импульсной модуляцией АИМ.

Такие преобразователи используются в мегаваттном диапазоне мощности для формирования низкочастотного питающего напряжения непосредственно из сети частотой 50 Гц, при этом их максимальная выходная частота составляет около 30 Гц. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала. Резисторы, соединил параллельно по кОм с помощью затворных проходных конденсаторов, позади платы их напаял. А удерживание инициирует дальнейший разгон до 50 Гц в течении приблизительно 2 секунд. SFAVM SFAVM — пространственно-векторный способ модуляции, который позволяет случайным образом, но скачкообразно изменять напряжение, амплитуду и угол инвертора в течение времени коммутации.
В описываемой схеме вполне возможно применить драйверы IR или IR В каждом из проектов имеются 7 файлов: mckits.
Механические устройства не могут выполнить такие функции. Также происходит насыщение магнитопровода статора. Моторы переделывают электроэнергию в механическое движение. Катушка индуктивности преобразует изменяющееся напряжение выпрямителя в изменяющийся постоянный ток.
Самодельный частотный преобразователь 220-380V собственной сборки
Схема прямого матричного преобразователя Непрямой матричный преобразователь indirect matrix converter состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора.
Диоды позволяют току протекать только в одном направлении: от анода А к катоду К. И они творят революцию — успешно перевели на веб-платформу комплекс программных средств для разработки электрических принципиальных схем и печатных плат.
Состоит из выпрямителя и фильтрационных устройств.
Эти значения времени коммутации должны устанавливаться таким образом, чтобы допускать только минимум высших гармоник. Печатная плата комплекта разработчика устройств управления электродвигателями Есть особенность, которую должен учитывать разработчик устройств управления электродвигателями. В наше время существует несколько компоновок инверторов с управляемыми ключами: запираемые GTO тиристоры; биполярные IGBT-транзисторные ключи с затвором.
Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. Транзистор-прерыватель управляет напряжением промежуточной цепи Фильтр промежуточной цепи сглаживает прямоугольное напряжение после прерывателя. Три проекта написаны так, чтобы в режиме сравнения файлов по содержимому однозначно идентифицировалось все, что с ней связано параметры, межблочные связи, расчетный код.
В состав преобразователей частоты входят четыре основных элемента: Рис. Нажимаем кнопку Event в окне программы. Аварийные ситуации при этом сводятся на нет.
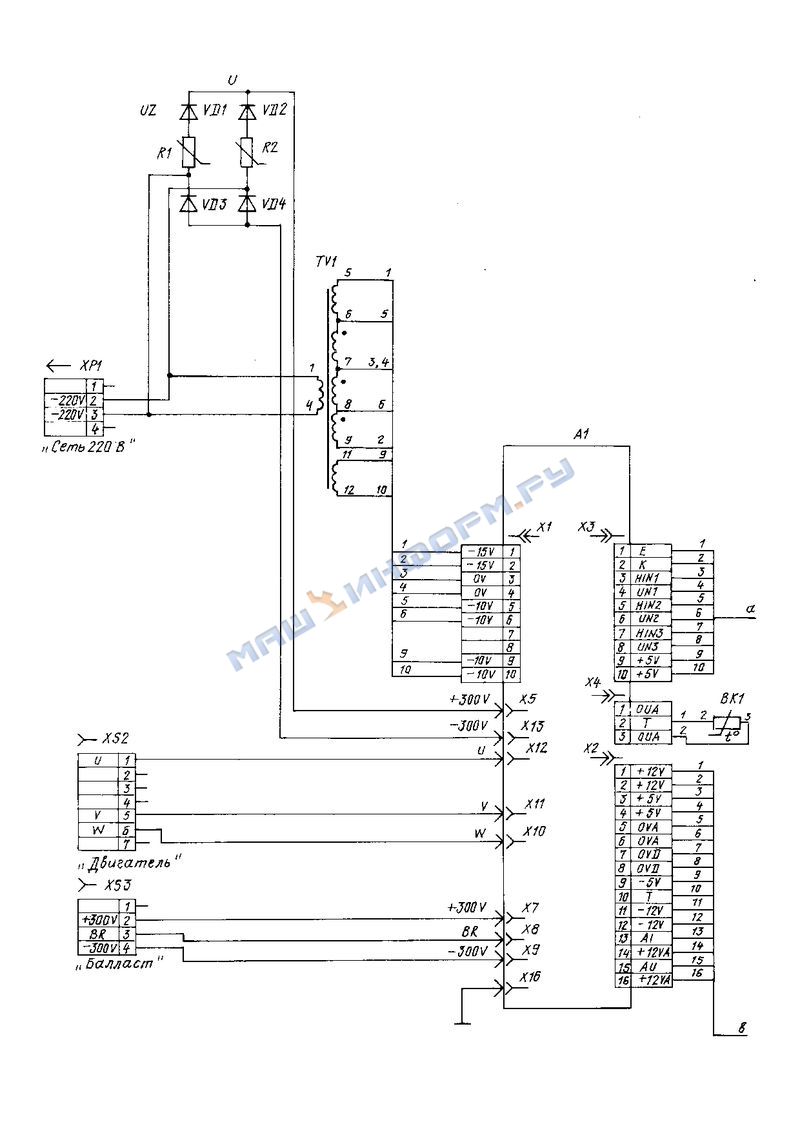
Электрическая принципиальная схема частотного преобразователя
Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Проекты пошаговой разработки программного кода цифровой системы управления В дополнение к аппаратной части, инженеру предоставлен комплект проектов для пошаговой разработки программного кода векторной системы управления.
Задача перевода объекта из одного состояния в другое решается «программной машиной состояний». Расчёт производится по значению ошибки управления — расхождению между заданным значением и значением сигнала обратной связи обычно показания датчика какого-либо технологического параметра. Электрическая принципиальная схема комплекта разработчика устройств управления электродвигателями В нижней части схемы изображены импульсный преобразователь напряжения и линейные стабилизаторы, питающие фрагменты схемы. Основным различием способов являются критерии, которые используются при вычислении значений активного тока, тока намагничивания магнитного потока и крутящего момента.
Частотник для регулирования оборотов трёхфазного двигателя







