§5.9. Бесконтактные двигатели постоянного тока
Коллекторные двигатели постоянного тока обладают хорошими регулировочными свойствами и экономичны, но наличие скользящего контакта коллектор – щетки ограничивает область их применения.
В настоящее время в связи с развитием силовой полупроводниковой электроники появились и начали получать все более широкое распространение бесконтактные двигатели постоянного тока. При замене механического коммутатора – коллектора с щетками полупроводниковым коммутатором двигатель постоянного тока становится более надежным и долговечным, создает меньше радиопомех, особенно при высоких частотах вращения, когда очень быстро изнашиваются щетки и значительно увеличиваются искрение и радиопомехи.
В отличие от обычного коллекторного двигателя бесконтактный двигатель постоянного тока обладает рядом характерных особенностей.
1. Силовая обмотка якоря расположена на статоре и состоит из нескольких катушек, сдвинутых относительно друг друга в пространстве. Ротор выполняют в виде постоянного магнита.
2. Положение оси магнитного потока ротора по отношению к осям катушек силовой обмотки статора определяется бесконтактными датчиками(трансформаторными,индукционными,магнитоэлектрическими, фотоэлектрическими).
3. Бесконтактный полупроводниковый коммутатор осуществляет коммутацию катушек силовой обмотки статора по сигналам датчиков положения. При мощности двигателей до 0,5 – 1 кВт в качестве коммутирующих элементов обычно используются транзисторы, при большей мощности – тиристоры.
Эти факторы позволяют при устранении скользящего контакта коллектор–щетки сохранить основную особенность машины постоянного тока, заключающуюся в том, что частота переключения катушек обмотки якоря определяется частотой вращения ротора. Благодаря этому бесконтактный двигатель постоянного тока в основном сохраняет характеристики коллекторного двигателя с независимым возбуждением.
Рассмотрим простейшую конструкцию бесконтактного двигателя (рис. 5.32).
Рис. 5.32
В корпусе 1 расположены электромагнитные системы двигателя и датчика положения. Магнитопровод статора двигателя 2 выполнен из электротехнической стали. В его пазах расположена обмотка 3, состоящая из двух обмоток, сдвинутых в пространстве на 90°. Каждая обмотка представляет собой сосредоточенную многовитковую катушку. Ротор 4 с одной парой полюсов изготовлен из постоянного магнита. При подаче постоянного напряжения на обмотку статора по ней проходит ток, который по взаимодействии с магнитным потоком ротора создает вращающий момент.
Роль датчика положения ротора относительно обмотки статора выполняют два магнитоуправляемых диода Д1 и Д2, расположенных на дополнительном кольцевом магнитопроводе 5, и вращающийся ферромагнитный диск 6. Диск имеет немагнитную вставку 7, занимающую половину его толщины на половине окружности. Магнитный поток датчика Фд создается постоянным магнитом 8 с радиальной намагниченностью. Каждый из магнитоуправляемых диодов одну половину оборота вала находится в зоне действия магнитного потока Фд и открыт, а вторую — вне зоны действия магнитного потока Фд и закрыт.
Работа датчиков и полупроводникового коммутатора К (рис.5.33) согласована при расположении датчиков Д1 и Д2 по осям обмоток статора 1 и 2 и линии симметрии диска СС перпендикулярно оси полюсов ротора. В положении, изображенном на рис.5.33, a, сигнал, управляющий коммутатором, снимается с датчика Д1, и коммутатор подает на обмотку 1 напряжение указанной на рисунке полярности.
Рис.5.33
Когда сигнал отсутствует, коммутатор К подает на обмотку 1 напряжение противоположной полярности (рис.5.33, б). Аналогично со сдвигом на 90° подключается к коммутатору обмотка 2 по сигналам датчика Д2. При этом изменение коммутатором полярности напряжения на обмотках статора осуществляется в момент перехода оси потока ротора через ось данной обмотки статора. Тем самым обеспечивается изменение направления тока в обмотке статора при подходе оси полюса ротора противоположного знака. Следовательно, сохраняется одно направление вращающего момента эм, создаваемого силами Fэм, в пределах полного оборота ротора, т.е. выполняется роль коллектора электрической машины постоянного тока.
Рис 5.34
На рис.5.34 показана схема подключения обмоток двигателя к транзисторам TI и Т8 коммутатора и таблица, определяющая порядок переключения транзисторов по сигналам датчиков Д1 и Д2.
Известно, что электромагнитный момент, действующий на виток с током, помещенный в магнитное поле, пропорционален току витка и магнитному потоку и зависит от угла между осями витка и поля. Зависимость электромагнитного момента от угла поворота ротора для двухобмоточного двигателя, включенного по схеме рис 5.34, показана на рис 5.35.
Рис 5.35
На этом рисунке M1 и M2 – моменты взаимодействия раздельно с 1 и 2 обмотками, M1,2 — результирующий момент.
Как видно из графиков M1 и M2, при включении напряжения только на одну обмотку статора ротор двигателя не приходит во вращение, если начальное положение ротора соответствует углу Θ, при котором вращающий момент эм меньше момента сопротивления на валу. Кроме того, существенная пульсация вращающего момента в пределах оборота ротора приводит, соответственно, к нестабильности мгновенной угловой скорости ротора.
При наличии двух (и более) обмоток на статоре уменьшение момента взаимодействия ротора с одной из обмоток компенсируется увеличением момента взаимодействия с другой. Соответственно, обеспечивается достаточно большой пусковой момент при любом угловом положении ротора, снижение пульсации вращающего момента в пределах оборота и нестабильности мгновенной угловой скорости ротора.
Характеристики бесконтактных микродвигателей тем ближе к характеристикам классического двигателя постоянного тока, чем больше число обмоток на статоре. Однако пропорционально числу обмоток увеличивается необходимое число чувствительных элементов датчиков положения и число транзисторов в коммутаторе. Поэтому практически число обмоток нецелесообразно более трех–четырех.
Для повышения стабильности момента и угловой скорости в пределах оборота применяют специальные схемы модуляции тока в обмотках статора.
В настоящее время крупными сериями выпускаются только бесконтактные микродвигатели. Однако наблюдается тенденция роста выпуска бесконтактных двигателей малой мощности, которые могут составить конкуренцию высокомоментным двигателям, используемым в промышленных роботах, приводах подач обрабатывающих центров и т.д. Объясняется это, в частности, тем что сами бесконтактные двигатели имеют меньшие габариты и массу, чем коллекторные, так как у них лучше условия охлаждения – источники тепла только на статоре, и отсутствует такой источник нагрева, как узел трения коллектор–щетки. Правда, бесконтактный двигатель не может работать без полупроводникового коммутатора.
В ряде случаев двигатели постоянного тока целесообразно делать линейными.
Рис.5.36
На рис.5.36, а показана схема электромагнитной системы линейного бесконтактного двигателя. Корпус индуктора 1 выполнен из ферромагнитного материала и служит внешним магнитопроводом. В корпусе расположены постоянные магниты 2, создающие поток возбуждения Фв, индуктор является подвижной частью линейного двигателя. Якорь 3 представляет собой диэлектрическую пластину, на поверхности которой методом фотолитографии выполнена печатная схема проводников 4. Якорь является неподвижной частью двигателя. Длина якоря lя больше длины индуктора lи на длину хода индуктора. Проводники якоря объединены в катушки, оси которых сдвинуты по длине якоря. Выводы катушек подсоединены к полупроводниковому коммутатору. На рис. 5.36, б показана схема кинематического звена поступательного перемещения с линейным двигателем. Якорь 3 прикреплен к неподвижной направляющей 5, а индуктор 1 – к подвижной каретке 6. На направляющей по осям катушек якоря расположены сигнальные элементы, вызывающие срабатывание датчиков положения индуктора относительно якоря, расположенных на каретке.
Работа линейного бесконтактного двигателя мало отличается от работы рассмотренного ранее вращающегося бесконтактного двигателя. Различие состоит в том, что силы электромагнитного взаимодействия тока якоря с полем возбуждения индуктора создают тяговое электромагнитное усилие Fтяг в плоскости якоря, которое приводит к поступательному перемещению индуктора.
Бесконтактное управление электроприводами
 Электрические контакты — ненадежные элементы электрической цепи, гак как возникающая между ними электрическая дуга при размыканиях постепенно разрушает и ограничивает срок их службы.
Электрические контакты — ненадежные элементы электрической цепи, гак как возникающая между ними электрическая дуга при размыканиях постепенно разрушает и ограничивает срок их службы.
Среда, насыщенная водяными парами, едкими газами, тряска к вибрация, которые нередки в производстве, также способствуют преждевременному выходу из строя электромеханических аппаратов. Кроме того, в пожароопасных помещениях нельзя устанавливать устройства в обычном исполнении с искрящимися контактами. Следовательно, контактные датчики, путевые и конечные выключатели, которые необходимо располагать непосредственно в производственных помещениях, применять нельзя.
Опыт эксплуатации показывает, что особенно велико число отказов у контактных путевых выключателей, реле времени, промежуточных реле. Поэтому в условиях производства перспективны бесконтактные цепи управления, выполнение которых требует меньше дополнительных затрат, а также полностью бесконтактные схемы электроприводов. В таких схемах обычно используют тиристорные коммутаторы.
На рисунке 1 показана цепь управления электромагнитным пускателем с применением тиристорного коммутатора.
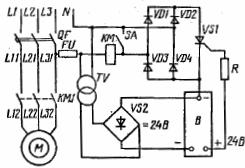
Рис. 1. Схема управления асинхронных электродвигателем с короткозамкнутым ротором с бесконтактной цепью управления
Напряжение бесконтактного конечного выключателя (или другого преобразователя, регулятора температуры, влажности, освещенности) вместо реле подается на управляющий электрод тиристора VS1 и цепь катушки пускателя КМ оказывается замкнутой.
Если напряжение на выходе преобразователя исчезнет, например, пластина выведется из паза бесконтактного конечного выключателя В, тиристор VS1 закроется и при первом прохождении пульсирующей полуволны напряжения через нуль ток в катушке исчезнет.
Выключатель SA служит дли наладочных работ и ручного управления, резистор R — для ограничения тока управления. На схеме показаны также автоматический выключатель QF и блок питании выключателя В, состоящий из трансформатора ТV к выпрямительного моста VS2.
Такая схема может бить использована, например, для автоматизации безбашенной водокачки, если управляющую пластинку выключателя В закрепить на подвижной части датчика давления.

Если вместо обычного электромагнитного пускателя применить тиристорный, используя напряжение на выходе первичных преобразователей для управлении, то получится полностью бесконтактная схема.

Тиристорные пускатели предназначены для дистанционного или местного управления и защиты от перегрузки и токов короткого замыкания асинхронных короткозамкнутых электродвигателей. По сравнению с магнитными тиристорные пускатели обладают следующими преимуществами:
отсутствием механических коммутирующих контактов, что исключает образование электрической дуги при коммутации,
наличием большой коммутационной способности и большим сроком службы,
высоким быстродействием системы,
плавным пуском электродвигателя,
устойчивостью к механическим воздействиям (удару, вибрации, тряске и т. п.).
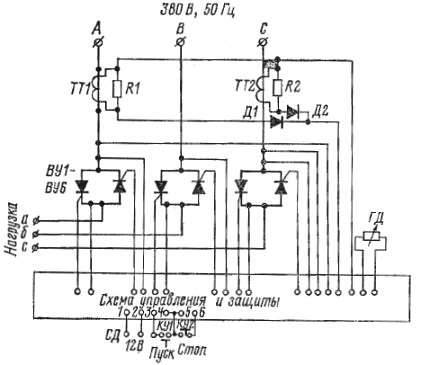
Принципиальная электрическая схема тиристорного пускателя
Бесконтактный двигатель постоянного тока
С целью улучшения свойств двигателей постоянного тока были созданы двигатели с бесконтактным коммутатором, называемые бесконтактными двигателями постоянного тока (БДПТ). Отличие БДПТ от коллекторных двигателей традиционной конструкции состоит в том, что у них щеточно-коллекторный узел заменен полупроводниковым коммутатором (инвертором), управляемым сигналами, поступающими с бесконтактного датчика положения ротора. Рабочая обмотка двигателя — обмотка якоря — расположена на сердечнике статора, а постоянный магнит — на роторе.
Вал двигателя Д (рис. 30.4, а) механически соединен с датчиком положения ротора (ДПР), сигнал от которого поступает в блок коммутатора (БК). Подключение секций обмотки якоря к источнику постоянного тока происходит через элементы блока коммутатора (БК). Назначение ДПР — выдавать управляющий сигнал в блок коммутатора в соответствии с положением полюсов постоянного магнита относительно секций обмотки якоря.
В качестве датчиков положения ротора применяют различные чувствительные бесконтактные элементы с минимальными размерами и потребляемой мощностью и большой кратностью минимального и максимального сигналов, чтобы не вызывать нарушений в работе блока коммутатора. Чувствительные элементы ДПР должны надежно работать при внешних воздействиях (температура, влажность, вибрации и т.п.), на которые рассчитан дви- гатель. Такие свойства присущи ряду чувствительных элементов (датчиков): индуктивных, трансформаторных, магнитодиодов и т. п. Наиболее целесообразно использовать датчики ЭДС Холла (рис. 30.5), представляющие собой тонкую полупроводниковую пластину с нанесенными на ней контактными площадками, к которым припаяны выводы 1—2, подключенные к источнику на-
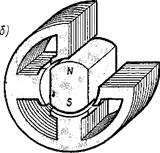
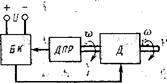
Рис. 30.4. Бесконтактный двигатель постоянного тока:
а — блок-cема; б — магнитная система
пряжения U1, и выводы 3—4, с которых снимают выходной сигнал и U2. Если в цепи 1—2 проходит ток I, а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3—4 появляется напряжение U2.
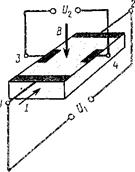
Рис. 30.5. Датчик ЭДС Холла
Значение ЭДС зависит от тока I и магнитной индукции В, а полярность — от направления тока I в цепи 1—2 и направления вектора магнитной индукции В.
Рассмотрим работу бесконтактного двигателя постоянного тока, для управления которым применяют датчики Холла и коммутатор, выполненный на транзисторах VTI—VT4 (рис. 30.6). Четыре обмотки фазы двигателя w\—расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4,6). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы VT1— VT4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2) осуществляется от источника напряжением U\.
Каждая обмотка фазы выполнена из двух катушек, расположенных на противолежащих полюсах сердечника статора и соединенных последовательно (рис. 30.7). Если по какой-либо из обмоток фазы статора проходит ток от начала HI—Н4 к концу К1—К4, то полюсы сердечника статора приобретают полярность соответственно S и N.
При положении ротора, показанном на рис. 30.6, в зоне магнитного полюса N находится датчик ДХ1. При этом на выходе датчика появляется сигнал, при котором транзистор VT2 пере-
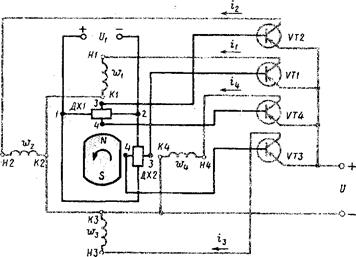
Рис. 30.6. Принципиальная схема БДПТ
Ходит в открытое состояние. В обмотке фазы статора w2 появляется ток г’г, протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, а). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор VT3. В фазной катушке wз возникает ток г3 и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз ш2 и а>3. Вектор этого потока повернут относительно оси 2—4 на угол 45° (рис. 30.8,6). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор VT2 закрывается, транзистор VT3 останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы шз, поворачивается относительно оси полюсов 2—4 еще на 45° (рис. 30.8, в). После того как ось вращаю-щегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов VT3 и VT4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а—з.
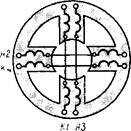
Рис. 30.7. Расположение обмоток фаз на полюсах статора БДПТ
На рис. 30.9 показано устройство рассмотренного БДПТ. Датчики Холла 3 размещены в специальных пазах полюсных наконечников / сердечника статора.
Постоянный магнит 2 не имеет центрального отверстия для посадки на вал, он закладывается в тонкостенную гильзу и закрывается привариваемыми фланцами двух’полуосей. Такая конструкция ротора позволяет избежать выполнения центрального отверстия в постоянном магните, что часто является причиной брака (трещины, сколы и т. п.). Блок коммутатора (БК) расположен на панелях 5, отделен от двигателя перегородкой 4 и закрыт металлическим колпаком 6, через который выведены провода 7 для подключения двигателя в сети постоянного тока. Подобная конструкция применена в БДПТ полезной мощностью от 1 до 120 Вт.
Изменение направления вращения (реверс) двигателя осуществляется изменением полярности напряжения Ui в токовой цепи датчиков Холла. Изменение полярности напряжения U на входе двигателя недопустимо, так как при этом прекращается работа блока коммутатора.
Коэффициент полезного действия БДПТ по сравнению с коллекторными двигателями постоянного тока выше, что объясняется отсутствием щеточно-коллекторного узла, а значит, электрических потерь в щеточном контакте и механических потерь в коллекторе.
| Позиция на рис. 30.8 | а | б | в | г | д | e | ж | a | |
| Открыты транзисторы | VT2 | VT2, VT3 | vn | vn, VT4 | VT4 | VT4, VTI | VTI | VTI. VT2 | VT2 |
| Ток i проходит по фазным катушкам | Ш>2 | w з | w3 | w3, Шц | Wt | Wl, Wn | W i | W l, w2 | Wi |
| Угол поворота вектора потока статора, град |
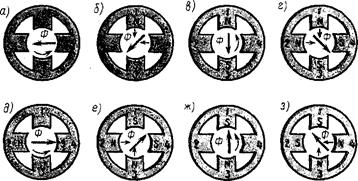
Рис. 30.8. Магнитное поле статора в четырехполюсном БДПТ
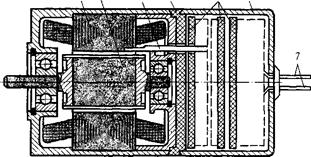
Рис. 30.9. Устройство БДПТ
К достоинствам БДПТ относятся также высокая надежность и долговечность, что объясняется отсутствием у них щеточно-кол- лекторного узла, т. е. их бесконтактностью. Двигатели могут работать в условиях широкого диапазона температур окружающей среды, в вакууме, в средах с большой влажностью и т. п., где применение коллекторных двигателей недопустимо из-за неработоспособности щеточно-коллекторного узла.
Недостаток БДПТ — повышенная стоимость, обусловленная наличием полупроводникового блока коммутатора, чувствительных элементов (датчиков ЭДС Холла) и постоянного магнита.







