- Система автоматического управления автомобилем
- Беспилотный автомобль Google
- Автопилот Tesla
- Российский автопилот
- Система Temporary Auto Pilot
- Система Traffic Jam Assistant
- Система Traffic Jam Assist
- Система ConnectedDrive Connect
- Система Super Cruise
- Система SARTRE
- Схема автоматического управления автомобилем
Система автоматического управления автомобилем
Стремительное развитие автомобильных электронных систем делает реальной идею беспилотного автомобиля. Многие автопроизводители и производители автокомпонентов активно работают над созданием системы автоматического управления автомобилем. Задача решается по двум направлениям:
- комплексная автоматизация автомобиля;
- автоматизация отдельных режимов движения транспортного средства (парковка, движение в пробках, перемещение по автомагистрали).
Комплексный подход к созданию беспилотного автомобиля реализуют могущественный Google.
В настоящее время разрабатываются и внедряются различные системы автоматической парковки, обеспечивающие параллельную и (или) перпендикулярную парковку автомобиля в автоматическом режиме. Парковочный автопилот имеют в активе BMW, Ford, Mercedes-Benz, Nissan, Opel, Toyota, Volkswagen.
Дальнейшее совершенствование системы адаптивного круиз-контроля позволяет реализовать автоматический режим движения автомобиля в пробках. В данном направлении работают Audi, Ford. Другим направлением является автоматизация движения автомобиля по автомагистрали. Разработки BMW, Cadillac основываются на существующих системах активной безопасности.
Беспилотный автомобль Google

В настоящее время система автоматического управления от Google реализована на шести опытных автомобилях Toyota Prius, Lexus RX 450h и Audi TT, которые проехали в беспилотном режиме свыше двух с половиной миллионов километров. Для реализации функций автоматического управления система включает в себя следующие входные устройства: лидар, радары, видеокамера, датчик оценки положения, инерционный датчик движения, GPS приемник.
Лидар сканирует область вокруг автомобиля на расстоянии более 60 м и создает точную трехмерную картину его окружения. Лидар представляет собой вращающийся датчик на крыше автомобиля.
Радары помогают определить точное положение удаленных объектов. На автомобиле установлены четыре радара, три из которых расположены в передней части, а один радар – сзади.
Видеокамера определяет сигналы светофора и позволяет блоку управления распознавать движущиеся объекты, в т.ч. пешеходов и велосипедистов. Видеокамера располагается на лобовом стекле за зеркалом заднего вида.
Датчик оценки положения фиксирует движение автомобиля и помогает определить его точное местоположение на карте. Датчик оценки положения установлен на левом заднем колесе.
Инерционный датчик движения измеряет направление ускорения или замедления, продольный и поперечный крен кузова автомобиля, при его движении. Используется датчик системы курсовой устойчивости.
Сигналы от входных устройств передаются в электронный блок управления, где производится их обработка в соответствии с заложенной программой и формирование управляющих воздействий на исполнительные устройства. В качестве исполнительных устройств используются конструктивные элементы рулевого управления, тормозной системы, системы курсовой устойчивости, системы управления двигателем.
С 2016 года работа над беспилотным автомобилем Google выделена в отдельную компанию Waymo.
Автопилот Tesla
Автопилот, позволяющий автомобилю автономно двигаться на автомагистрали, используется на модели Tesla Model S с 2015 года. Система включает 8 камер кругового обзора, 12 ультразвуковых датчиков и головной радар.
Автопилот от Tesla пока имеет следующие ограничения: не всегда распознает дорожную разметку, не считывает сигналы поворота и стоп-сигналы, не обнаруживает пешеходов и велосипедистов. Но компания проводит постоянное улучшение программного обеспечения системы за счет обратной связи со своими автомобилями. Обновленная версия программы загружается в автомобиль по радиосигналу.
Российский автопилот
Проект по созданию российского автопилота стартовал в начале 2012 года по инициативе компании РобоСиВи. Система включает два основных блока – навигационный комплекс ГЛОНАСС и т.н. комплекс технического зрения. Что входит в комплекс технического зрения компания пока не раскрывает, говориться только о большом количестве датчиков.
В настоящее время производится тестирование системы на малогабаритной модели, в которой реализованы функции прокладки маршрута, трогания с места, маневрирования, торможения при возникновении препятствия (транспортное средство, люди). Несмотря на то, что российская компания работы начала значительно позже Google, она имеет все шансы добиться конкурентного преимущества за счет невысокой цены (предположительно в 50 раз дешевле Google) и универсальности.
Система Temporary Auto Pilot

В рамках проекта HAVit (Highly Automated Vehicles for Intelligent Transport – Высокоавтоматизированные автомобили для интеллектуального транспорта) в 2011 году была представлена полуавтоматическая система Temporary Auto Pilot, TAP (Временный автопилот). Система позволяет водителю в определенных условиях отдать управление автомобилем под контроль автоматики. По своей сути система является промежуточным этапом на пути к роботизированному автомобилю.
Система TAP объединяет в единое целое уже известные разработки Volkswagen: систему адаптивного круиз-контроля, систему помощи движению по полосе, систему распознавания дорожных знаков. В своей работе система Временного автопилотирования использует стандартные входные устройства перечисленных систем активной безопасности: лидар, радар, видеокамеру, ультразвуковые датчики.
Сигналы от входных устройств передаются в электронный блок управления, который с помощью исполнительных механизмов реализует следующие автоматические функции:
- поддержание безопасного расстояния до впереди идущего автомобиля;
- остановка и трогание с места;
- движение по полосе;
- распознавание знаков ограничения скорости и приведение скорости в соответствие с требованиями знака.
Система обеспечивает оптимальную степень автоматизации в зависимости от дорожной ситуации и состояния водителя, тем самым способствует безаварийному движению. Система работает на скорости до 130 км/ч. Система TAP полностью готова для внедрения на серийные автомобили.
Система Traffic Jam Assistant

Система Traffic Jam Assistant от Audi — первая серийная система автопилота для движения в пробках. Система автоматически поддерживает дистанцию до впереди идущей машины, тормозит, разгоняется, поворачивает, объезжает препятствия и даже уступает дорогу машинам экстренных служб. Конструктивно автопилот для пробок построен на основе адаптивного круиз-контроля и работает на скорости от 0 до 60 км/ч.
Система объединяет рад входных устройств: два радара, широкоугольную видеокамеру и восемь ультразвуковых датчиков. Радары сканируют определенные секторы на расстоянии 250 м. Видеокамера определяет дорожную разметку и различные препятствия. Ультразвуковые датчики контролируют пространство спереди, сзади и сбоку автомобиля. В любой момент работы системы водитель может взять управление автомобилем на себя.
Система Traffic Jam Assist
Систему автоматического движения в пробках готовит Ford и планирует ее использование на серийных автомобилях к 2017 году. Система Traffic Jam Assist включает радар и камеру, которые отслеживают движение соседних машин. Электронный блок управления выбирает нужную скорость и обеспечивает движение автомобиля в потоке.
Система ConnectedDrive Connect

Компания BMW работает над системой ConnectedDrive Connect (CDC), предназначенной для движения по автомагистрали. Система CDC включает ультразвуковой датчик, камеру, радары и лидар, сигналы от которых обрабатываются в электронном блоке управления. В результате воздействия на исполнительные механизмы различных систем автомобиля, изменяется его скорость и траектория движения. Помимо этого, система не превышает разрешенной на участке скорости, не производит обгон справа, а также возвращает автомобиль в свой ряд после обгона. В общем, в автопилоте реализован алгоритм идеального водителя. По заявлению компании система пока не готова к серийному применению.
Система Super Cruise

Система автоматического управления Super Cruise от Cadillac обеспечивает движение автомобиля по автомагистрали. Она позволяет осуществлять маневрирование, торможение, движение по полосе без участия водителя.
Система построена на ряде готовых решений компании: адаптивном круиз-контроле, системах автоматического экстренного торможения, предупреждения о столкновении, помощи движению по полосе, помощи при перестроении, активного головного света и др.
Текущее положение автомобиля оценивается с помощью входных устройств – радара, ультразвуковых датчиков, камеры и системы GPS. Разработчик отмечает, что эффективность работы системы зависит от внешних факторов – погода, наличие разметки.
Система SARTRE

Интересное решение автоматизации движения автомобиля предлагает компания Volvo. Система Safe Road Trains for the Environment (SARTRE) позволяет нескольким машинам двигаться по дороге в организованной колонне. Автомобили идут за головной машиной, в качестве которой выбирается грузовой автомобиль с водителем-профессионалом. Автомобили выстраиваются с дистанцией 6 м и полностью повторяют движение ведущего грузовика, что позволяет водителем отдохнуть, покушать, поговорить по телефону.
По желанию каждый из автомобилей в любой момент может покинуть группу. Для создания системы SARTRE используются наработки Volvo в области активной безопасности, в т.ч. адаптивный круиз-контроль. В настоящее время система находится в стадии испытаний.
Схема автоматического управления автомобилем
Автоматизированная система (далее: « система управления») – это комплекс, включающий в себя математическое обеспечение, электронные, электрические и другие элементы, которые позволяют реализовать наиболее эффективно алгоритмы управления конкретным объектом в полном соответствии с его конечной целью, с учетом внешних воздействий, внештатных ситуаций и иных условий, которые могут оказать воздействие, как на сам объект управления, так и на систему в целом.
Все системы управления подлежат классификации. Основные два класса:
- а) системы, работающие без вмешательства человека
- б) системы, когда вмешательство такое предусмотрено.
Далее идет деление по назначению, способам реализации управления, конструктивным особенностям, по классу исполнения и т.д. Нас интересует конкретная система — система управления ДВС. Которые, также между собой различаются. Но абсолютно все автоматизированные системы имеют нечто общее, присущее всем.
Все системы управления имеют:
- основной орган управления
- объект управления
- управляющие элементы
- элементы управления
- исполнительные устройства и механизмы.
Основной орган управления включает в себя: математическое обеспечение всех возможных вариантов алгоритмов управления объектом, электронные компоненты, обеспечивающих анализ, обработку, хранение, поиск, выбор необходимого алгоритма управления, соответствующего ситуации и выдачу необходимых команд управления. А также обеспечивающих продвижение информации (считывание, запись, и т.д.), обработку сигналов, обеспечивает полную синхронность процессов управления с состояниями объекта управления. В нашем случае это один или несколько электронных блоков управления.
Все системы управления имеют внутренний контроль, и отслеживают состояние, исправность и правильность работы элементов системы, и самого объекта управления. Полнота информации и количество контролируемых параметров определяются назначением, классом системы и др.
Все системы управления имеют обратную связь. Назначение, которой контроль за правильностью выбранного алгоритма управления, с последующей корректировкой. Количество точек обратной связи — определяется объектом управления, а также классом и назначением… системы и т.д.
Все системы управления должны обладать заданной степенью достоверности, помехозащищенности, учитывать воздействие внешней среды.
Определяет все основные параметры любой системы управления, является основным ее элементом и все управление строится в его интересах, для достижения конкретного конечного результата. Не может быть системы управления без объекта управления.
Поэтому те, кто пытается провести «родословную» автомобильных систем управления, от какого-то датчика кислорода, или транзистора, появившегося неизвестно почему под капотом, спешу успокоить — точка выбрана неверно. Но мы сегодня говорим по конкретному вопросу. И поэтому не будем добавлять «синьку» в кровь и спорить, как правильно разбивать яйцо — с тупого или острого конца.
Конкретная цель: «его надо съесть».
Точно также конкретную цель и задачу имеет объект управления. И вся система, все ее элементы, работают именно на достижение конкретной цели объектом управления.
Внутри любой системы управления существует жесткое разделение.
Каждый элемент управления системы имеет свой уровень, на котором прописан в системе. Каждому элементу по уровню определенны задачи.
Это сделано для того, чтобы управление сделать гибким и своевременным.
Это сделано для того, чтобы не было никакой путаницы ни при выборе нужного алгоритма, ни при направлении (перенаправлении) его на следующий управляющий элемент или управляемый, но стоящий ниже уровнем.
Команда (алгоритм) в первоначальном виде хранится в виде кодовой последовательности «1» и «0» . В этой последовательности содержится информация не только о том, что и как нужно сделать, но и
на каком уровне
Элемент управления более высокого уровня, выполнив свою задачу, убирает информацию, его касавшуюся и направляет её далее. Таким образом — ключевой транзистор форсунки, в результате получит только одиночный импульс U(I) определенной длительности — это для него команда. Он как раз и есть управляющий элемент последнего нижнего уровня — управляет форсункой (принимаемое всеми выражение, но не точное, поскольку не полностью отображает процесс управления и задачи управляющего элемента.***)
Которая, в свою очередь, является исполнительным устройством системы впрыска. Но, вовремя пришел импульс управления или нет, соответствует ли его длительность, а следовательно и количество топлива ситуации — не их дело. Другими словами как на шлагбауме — веревку отпустил — веревку натянул.
Тоже самое касается и датчиков. Иногда можно услышать:
— «Датчик кислорода Главный…..»
Это где «главный»?
Его задача в системе определена четко: «Непрерывная выдача информации о наличии…».
Вот что видит, то и сообщает. И других задач у него нет, и никогда не будет. А если таковые появятся, то и датчик будет другой.
Наделение элементов системы не свойственными им качествами — неправильно. Это мешает познанию объекта.
Строгое и точное разделение есть! Все остальное выдумки. Классификация систем общая, а особенно внутренняя, позволяют правильно понять общее назначение, принципы работы. Система управления в своем составе может иметь управляющие элементы, имеющих признаки самостоятельных систем. Такие элементы называются подсистемой. Но разницы нет, в системе она все равно ставится на определенный уровень, с определенным блоком задач. Система же управления может осуществлять только контроль за ними или контроль и управление. Примеров много, смотрите описание на любой автомобиль.
Один для понимания приведу.
Был на двигателе карбюратор. Было понятие «топливоподача». Соответствовало.
Сделали точечный впрыск. Можно говорить теперь «топливоподача»? Нет.
Топливоподача для системы закончилась на форсунке.
Сделали распределенный (многоточечный ) впрыск. Можно говорить…… Нет, нет и нет.
Четкое разделение получили система впрыска и подачи топлива. В первую очередь по задачам.
Задача топливной системы- подать топливо до форсунок (топливного распределителя), излишки его убрать обратно в бак.
Задача системы впрыска — обеспечить впрыск топлива в камеры сгорания. Причем это можно теперь сделать не только в такт «всасывания», а и на такте «сжатия», причем в самый последний его момент. Не может управляющий элемент решать разные по характеру задачи. Это первое.
Второе – систему топливную включили в состав системы впрыска, как подсистему. А куда, по-вашему, ее должны были отнести? К системе зажигания? Но даже самая плохая хозяйка не будет хранить, мясо, масло, крупы в одной коробке. Что-то в холодильнике, что-то в столе — но все на своем месте.
А программисты ребята посерьезнее. Им нужны четкие определения, с разграничением функций, задач… В системе управления нет команд типа:
— « Эй, уменьшите питание на погружной топливный насос, давление в «рейке» растет! Ну, кто-нибудь, догадается брызнуть хоть какой-то форсункой….!».
Последнее. Возможно, не имеет отношение к самим системам, но имеет к тому, чем мы занимаемся. А поскольку каждого из нас можно считать профессионалом, пусть с разным уровнем, но все же.
То, скажем, подобное «равенство систем»,которое было выше рассмотрено, и употребленное в разговоре между специалистами, звучит примерно, как обращение к английской королеве: — « Девушка не подскажете, который час…?» Я не о королеве,- я о профессии. Уважать, однако, надо.
Без жесткого разделения и классификации внутри самой системы — система мертва. Невозможно написать математическое обеспечение, для чего то «этакого», называемого как угодно и наделенного не пойми какими функциями. Математика наука точная. И еще, если перефразировать известное выражение из к/ф «Операция «Ы» ………..»
: — «Все уже придумано, до нас»
-, станет понятно, что кричать, доказывать что-то, при этом размахивать гаечным ключом или сканером, подчеркивая свою принадлежность к «элитному классу» — неправильно. Ну, это если мягко сказать. А если поконкретнее, то это будет выглядеть так:
«- нормальное функционирование Автоматизированных систем управления зависит и определяется: — 1….2……и т.д. и на последнем — « техническое облуживание и ремонт» (есть другое название)».
Вот на этом уровне мы с вами и решаем задачи, обслуживая и ремонтируя, как сам объект управления, так и элементы системы управления. Кто и что может делать – это вопрос квалификации. А вот кто куда лезет….ну, это за рамками рассматриваемого вопроса.
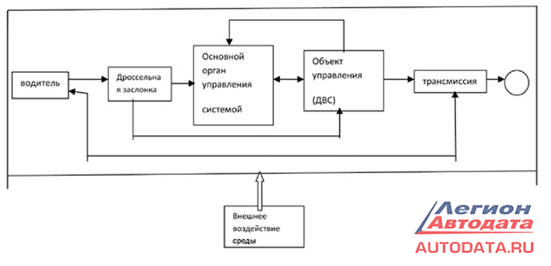
Да, «простая схема». Нет, можно расписать и подробнее, каждый элемент показать, но я их объединил для наглядности. Вот так в упрощенном виде все и выглядит. Человек, именно с него все начинается, он воздействует на систему управления. И подчиняясь ему, система выполняет свои функции, обеспечивая наиболее оптимальное управление ДВС на различных режимах.
Если взять прямоугольник с надписью «основной орган управления» — то его можно расписать до отдельного элемента. Вопрос «зачем»? Для понимания достаточно блок – схемы. Тем более, что если мы и выполняем ремонт всеми нами уважаемого ЭБУ, не думаю, что кто-то пытается найти неисправность в его «логической» части.
Почему система управления «все знает».
Не знает она, в принципе, ничего. Просто в органе управления есть устройство, в которое, перед установкой уже заложены определенные алгоритмы работы. Это программа действий на всевозможные ситуации, различные точки для отсчета и сравнения и др.- те данные, без которых система осуществлять управление не сможет. Это данные, которые предназначены для очень долгого хранения и не подлежащие изменению. Они сохраняются даже при отключении питания. В нашем случае, все это оформлено в одном блоке, где находятся все электронные компоненты, управляющие элементы и элементы управления определенного уровня. Элементы системы более нижних уровней (датчики, электрические клапаны и т.д.), размещаются в соответствующих местах, в том числе на ДВС или его системах. Подсистемы могут иметь свои блоки управления, но они будут обязательно связаны с основным. Основной блок, чаще всего называют ЭБУ. Он имеет и другие название на жаргоне. Мне будет тоже проще и поскольку ЭБУ — это уже общепринято, я буду употреблять эту аббревиатуру, подразумевая, что в нем то, о чем сказано выше.
Итак, основная информация записана в процессоре ЭБУ. Что же это за информация? Во-первых, это записано не буквами, не цифрами, а определенными логическими последовательностями. Да простят меня программисты, ибо я рискну привести пример на двоичной системе. О языке написания скажу дальше. Поэтому данный пример корректен только до определенного момента, это не язык процессора.
Но на определенном этапе преобразования и анализа сигналов это присутствует. Такая последовательность может выглядеть (абсолютно произвольно пишу), примерно так: …0010011111000000111110001111… похожими последовательностями и происходит управление, корректировка и пр.
Именно в такие последовательности превращаются сигналы всех датчиков, входящих в систему.
Именно такими последовательностями описываются состояния механизмов объекта управления – ДВС. И самое главное — идет преобразование импульсной последовательности в логическую или наоборот. Информация, заложенная в команде или импульсной последовательности не должна теряться или искажаться или превращаться в вид, когда возможно ее неоднозначное «толкование» для системы или ее управляющих элементов и исполнительных механизмов. Поэтому, я выше говорил, что системы управления должны обладать заданной степенью достоверности. Что же это такое? Это вполне конкретный параметр.
В обиходе, говоря : — «достоверность», мы подразумеваем два состояния: — «правда-ложь». Для системы это можно записать так:
Но система ориентируется на мгновенные значения показаний датчиков, и управление осуществляет точно также. И режимы работы у двигателя будут различными и быстро меняющимися. Вот поэтому достоверность заданная. И задается она системе, исходя из всего диапазона условий и режимов для объекта управления. В нашем случае, исходя из всех возможных режимов ДВС и других условий, которые могут оказать влияние на управление достоверность должна быть не ниже установленного значения. Рассчитывается сама достоверность просто — это отношение неправильных (искаженных) импульсных последовательностей или логических, к общему количеству, в определенный промежуток времени, при различных режимах управления.
Например, достоверность задана для системы:
Это означает, что допустима одна ошибка на один миллион импульсных комбинаций.
А кто-то, наверное, уже составил или представил себе отношение, о котором я упомянул выше.
И возник вопрос:- « Это как? Если в отношении числитель и знаменатель равны, то отношение равно единице, а если ее родимую умножить на 100% , то получается, что при «абсолютной лжи» — достоверность равна 100%.» А где вы увидели, чтобы я что-то подобное написал и тем более поставил знак равенства? Но об этом мы поговорим подробнее, когда будем рассматривать преобразование различных сигналов в нужный нам вид, сохраняя максимально заложенную в них информацию. Скажу только, что, в нашей системе есть еще такой параметр как скважность. И этот параметр, мы видим. Он изменяется в зависимости от режима работы или других причин. Правда, многие на него не обращают внимания, поскольку даже не знают, зачем он там нужен. По нему в автоматизированных системах управления можно оценить достоверность в системе.
А, допустим, в радиолокационных системах — скважность уже будет характеризовать другой параметр.
Теперь о некоторых понятиях, и по этой части систем у правления мы закончим.
Мне как-то пришлось прочитать критический материал на статью и вообще. Критик указывал на некомпетентность автора в том , что тот использовал выдуманные названия и определения, не принятые в импульсной технике. Действительно, что было, то было…
И с критиком в этой части я согласен по сути, но не по форме, в которой он высказался. Далее критик перешел к рассмотрению осциллограммы сигнала датчика. И в своих рассуждениях, уличая автора, в неправильности проведенных измерений, употребляет всего лишь два слова : — « …. что здесь импульс отрицательный….» и для сравнения приводит осциллограмму из руководства….
Я дальше читать не стал. Поэтому приведу несколько графиков и поясню.
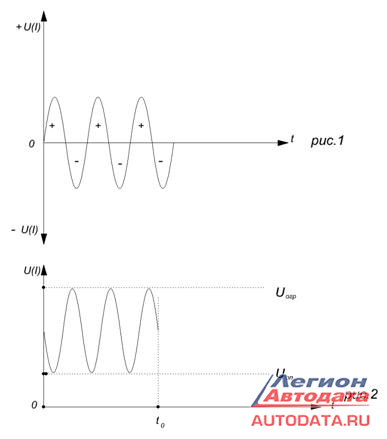
Сигнал меняется в течении времени, имеет отрицательные и положительные периоды. Импульсным сигналом не является.
Рис.2 — Импульсная последовательность.
Импульсы по форме — фрагменты синусоиды. Рассматривается в определенный момент времени. Амплитудные значения рассматриваются от некой величины не равной даже 0. Имеется ограничение по амплитуде. Ну, и где отрицательный импульс, кто увидел? Нет его там, и никогда не будет. В импульсной технике, используются высокостабильные генераторы синусоидальных колебаний. Из них формируются импульсные сигналы. В нашем случае, это будут импульсы тактовой частоты и синхронизации. Забегая вперед, скажу — преобразование синусоидальных колебаний в импульсы, выполняется простой операцией детектированием. После которой остаются только положительные полуволны. Отрицательная же убирается. А это уже импульсный сигнал. Сохранять отрицательную полуволну не имеет смысла. Она несет в себе ту же информацию, что и положительная, только с противоположным знаком. А, использовать импульсы различной полярности, но несущих в себе одинаковую информацию, при формировании команд управления или описания мгновенных состояний в системе управления — неверно. Как должно выглядеть при этом математическое обеспечение? Одно и тоже значение, оба правильные и отличаются только знаком. Тем более что значения « + » и « — » в системе уже есть и используется. Поэтому в автоматизированных системах управления используются импульсные сигналы строго определенного вида и формы. И если даже информация от датчиков будет содержаться в различных параметрах сигналов, определяющих форму и вид сигнала, такие сигналы все равно будут преобразованы в установленную форму и вид. В первоначальном же виде, такие сигналы, — система «внутрь себя» не пропустит. И поэтому эта проблема решается сразу, на этапе конструирования. Подбором и установкой соответствующих датчиков и пр.
Нет, информацию от датчиков о состоянии объекта управления, можно передать и сложными импульсными сигналами, что–то похожее на видеоимпульс. Но тогда потребуются другие решения для его преобразования. А в каком виде записана информация, я уже говорил. А чтобы представить ее в виде последовательностей «1» и «0», нужно будет произвести не одно преобразование, достигнув нужного вида, сохранить заложенную в первоначальном виде сигнала информацию, достигнуть заданной степени достоверности и быстродействия и т.д.
Если задаться целью, то можно. Правда, чтобы это не повлияло на комфорт, размер салона, багажника, и т.д. — электронную часть системы можно будет вынести, скажем, в прицеп, или на крышу. А что, на крышу это оригинально — изготовить соответствующий корпус, замки молдинги, хром-никель-золото (это пожеланию) — прикольно. Только вот в чем беда — такой признак как «прикольность», при построении систем ни в основу построения, ни в классификацию не заложен. А есть нечто общее для всех, и это нечто не зависит от сложности решаемых задач. Простота и вытекающая из нее Надежность. Именно известные, изученные процессы и явления, именно отработанные конструктивные решения, в виде конкретных устройств и составляют основу построения системы.
И еще об Объекте управления.
ДВС (двигатель внутреннего сгорания) — незаслуженно забытый и каким-то чудным образом, и даже по непонятным причина, кем-то исключенный из системы управления.
ДВС — основной элемент системы управления.
НЕ ЭБУ, а именно ДВС. И без четкого понимания процессов в нем, невозможно понять работу системы, а тем более провести анализ и по полученным результатам измерений и другим признакам ненормальной работы, правильно установить причину. Ибо все процессы в системе взаимосвязаны. С момента создания двигателя всегда решался вопрос, как сделать оптимальной его работу. Этот вопрос стоит и по сей день. Просто то, что мы видим сейчас — технически было невозможно решить тогда. Как, по-вашему, когда впервые стал вопрос о непосредственном впрыске? Только не надо вспоминать год выпуска японцами первого GDI. В 1877г.- Аугуст Отто, а не японцы. Ну, ладно, это слишком давно. Возьмем дату поближе. Распределенный впрыск, когда на двигателе сделали? Нет, сначала, он был механический. Опять японцы?
В начале 60-х прошлого столетия (1960-1965гг), наши талантливые ребята, в г. Харьков оборудовали распределенным впрыском чуть больше 1000 автомобилей «Москвич». Результат- повышение мощности, крутящего момента, экономия топлива, убран пресловутый «подсос», запуск двигателя при любой погоде (у тех у кого был Москвич», зимой обязательный атрибут — паяльная лампа. ).Выхлоп стал чище и т.д.
Поставили рядный четырехплунжерный ТНВД, который создавал давление около 100 атм. И механическую, пилообразную рейку для управления впрыском. Но машина стала дороже. А вопрос цены тогда был важнее — для пропаганды. А остальное просто не учитывалось. Вот и вернулся к нам нами же созданный и реализованный вид впрыска, в виде «джетроника». А наш — благополучно почил ….. Но ладно бы только это. Пока наша пропаганда считала микроэлектронику, кибернетику «продажными девками империализма»….и т.д. мы получили то, что получили.
Поэтому мы имеем на своем столе ПК, но если начнем рассматривать его устройство — ни одного своего термина мы там применить не сможем. Сможем только перевести на понятный нам язык и некоторые общепринятые понятия. Но с системами управления и ДВС дело обстоит иначе. Тут уж на зарубежных «первопроходцев» кивать не надо. Мы получили от них все в виде готовых автомобилей, с готовыми решениями. Все это они делали под свои условия. Под свое топливо, под уровень своего автосервиса, под требования экологии. Так что вместе с машинами, системами и «мануалами» описывающими процессы – мы получили для своих конкретных условий — «головную боль» и она обусловлена и топливом и уровнем сервисного обслуживания и пониманием (непониманием) того что написано. Так вот в последнем пункте мы попробуем разобраться. Ибо в АСУ (САУ) и двигателях процессы известны , понятия четкие и не ими определенные. Просто язык другой — вот и не все всем понятно.
Все мы считаем, что работа двигателя нам понятна и мы все знаем о нем.
Сейчас мы перейдем к другой части — где будем рассматривать, как механические состояния преобразуются в электрические сигналы определенной формы. И как система «понимает» по электрическим сигналам, в каком положении находится механизм. А для того, чтобы, это не показалось теорией, попробуйте сами сделать так:
(проводится по желанию, результаты личные и если кто-то пожелает их сообщить, то не для обсуждения и оценки.)
«…… поршень первого цилиндра, перешел в ВМТ (конец такта сжатия). Впускные и выпускные клапана цилиндра в закрытом состоянии. В это время поршень второго цилиндра находится…………, поршень третьего…………. ,поршень четвертого…………»
И тоже — на шестицилиндровом двигателе.
МАРКИН Александр Васильевич
Таврово мкр 2, пер. Парковый 29Б







