Пуск двигателя с фазным ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению s п= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
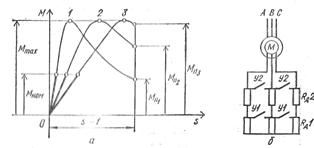
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток I п = (4,5 — 7) I ном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.

Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1 , а, кривая 3), если критическое скольжение двигателя с фазным ротором
s кр = ( R2′ + R д ‘) / ( Х1 + Х2 ‘) = 1 ,
где R д ‘ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) M ном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85 Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.

Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1 , t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) I ном и ток переключения I 2, который должен обеспечить момент переключения М 2 > М c .
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
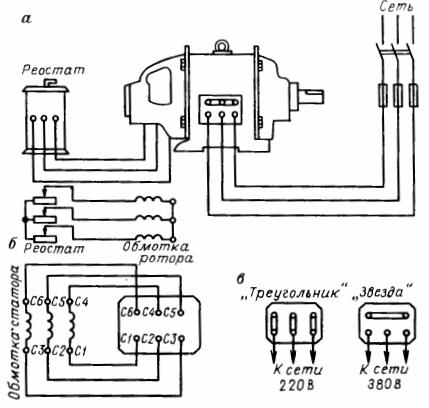
Рис. 3. Схема соединения обмоток двигателя с фазным ротором: а — к питающей сети, б — ротора, в — на доске зажимов.
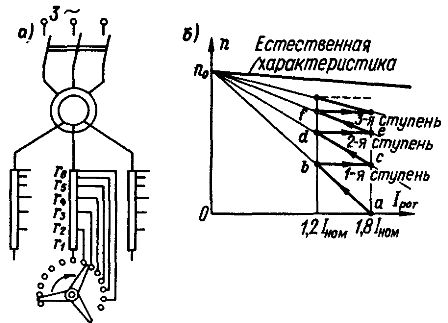
Рис. 4. Пуск двигателя с фазным ротором: а — схема включения, б — механические характеристики
Схема пуска двигателя с фазным ротором, функции тока.

Схема подключения асинхронным двигателем с фазным рото ром в функции тока представлена на рисунке 1. Для контроля пус ка по току применяют токовые реле, которые срабатывают при пусковом токе и отпадают при минимальном токе переключе ния .
Пуск двигателя.
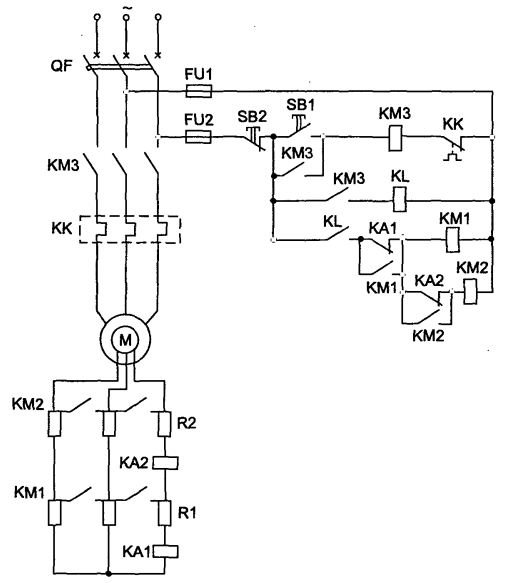 Рисунок 1 — Cхема пуска двигателя с фазным ротором, функции тока.
Рисунок 1 — Cхема пуска двигателя с фазным ротором, функции тока.
Автоматическим выключателем QF напряжение подается на управляющую и силовую цепь. После нажатия кнопки “ Пуск” SB1, подключается магнитный пускатель КМ3, который срабатывая, шунтирует кнопку пуска, и подключает к питающей сети катушку блокировочного реле KL. Нормально разомкнутый контакт реле KL подает питание на пускатели КМ1, КМ2. Собственное время срабатыва ния реле тока КА1 и КА2 меньше, чем соответствующих контак торов КМ1 и КМ2, поэтому реле тока срабатывает раньше, и пуск двигателя осуще ствляется с полностью введённым сопротивлением в цепь ротора.
В начальный момент пуска асинхронного двигателя с фазным ротором пусковой ток максимален, следовательно, срабатывает токовое реле КА1, которое своими разомкнутыми контактами не даёт сработать реле КМ1. По мере разгона двигателя пусковой ток уменьшается до значения уставки КА1 при котором КА1 отключается замыкая свои нормально замкнутые контакты, позволяя сработать реле КМ1 которое шунтирует первую ступень резистора. Одновременно замыкается блокировочный контакт КМ1, что ставит катушку контактора КМ1 на « самоподхват » при размы кании контакта КА1. После шунтирования первой ступени резистора ток снова возрастает до максимального значение, что вызывает срабатывание реле КА2 которое препятствует срабатыванию реле КМ2. После дальнейшего разгона двигателя ток снижается до тока срабатывания реле КА2 которое “ отключившись” подключает к напряжению магнитный пускатель КМ2. При этом шунтируется вторая ступень пускового резисто ра .
Автоматическое управление электроприводом
Основная функция автоматического управления электроприводом — запуск электродвигателя, остановка, торможение, реверсирование, поворот на определенный угол механизма в зависимости от времени или пути. В практике управления электроприводами известно большое количество схем, которые отражают многообразие требований, предъявляемых к электроприводу различных производственных машин. Однако различия в схемах часто не являются принципиальными, так как даже самые сложные из них представляют собой сочетание некоторого ограниченного числа стандартных узлов и простейших цепей, связывающих эти узлы.
1. Управление включением асинхронных электродвигателей с короткозамкнутым ротором
Схема управления с помощью магнитного пускателя (рис. 1). Магнитные пускатели широко применяют для пуска асинхронных электродвигателей мощностью до 75 кВт. Они обеспечивают дистанционный пуск, остановку, нулевую защиту и, с помощью теплового реле, защиту от перегрузок двигателя. При нажатии кнопки «Пуск» главные контакты ПМ включают двигатель; блок — контакты ПМ шунтируют кнопку «Пуск»; для отключения нужно нажать кнопку «Стоп».
Схема управления с помощью реверсивного магнитного пускателя (рис. 2). В тех случаях, когда в процессе работы необходимо изменять направление вращения электродвигателя, применяют реверсивные магнитные пускатели. Такой пускатель состоит из двух нереверсивных, помещенных в один кожух и имеющих блокировку (размыкающие контакты Н и В) от возможности одновременного включения главных контактов в цепи двигателя.
Для лучшей блокировки от возможности одновременного включения обеих пускателей применяются кнопки с нормально замкнутыми и нормально разомкнутыми контактами. При нажатии кнопки «Вперед» одновременно размыкаются контакты «Назад» (рис. 3).
Схема управления с динамическим торможением (рис. 4). Для быстрого торможения в обмотку статора подается постоянный ток. При нажатии кнопки «Стоп» отключается контактор П и включается контактор Т. С последним связано маятниковое реле, которое с выдержкой времени размыкает свой размыкающий контакт. Контактор Т отключает питание двигателя постоянным током.
Схема управления с переключением при пуске обмотки со «звезды» на «треугольник» (рис. 5). При нажатии кнопки «Пуск» включается линейный контактор КЛ и получает питание катушка реле времени РВ, размыкающий блок-контакт которого включает катушку контактора К3.
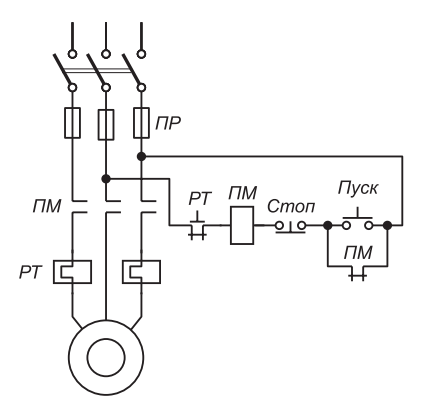
Рис. 1. Схема управления асинхронным электродвигателем при помощи магнитного пускателя
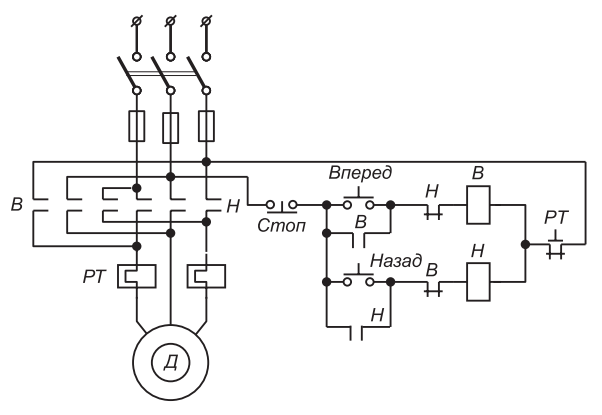
Рис. 2. Схема управления асинхронным электродвигателем при помощи реверсивного магнитного пускателя
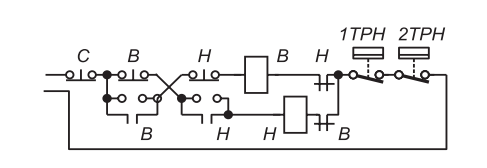
Рис. 3. Схема управления реверсивным пускателем с блокировочными кнопками
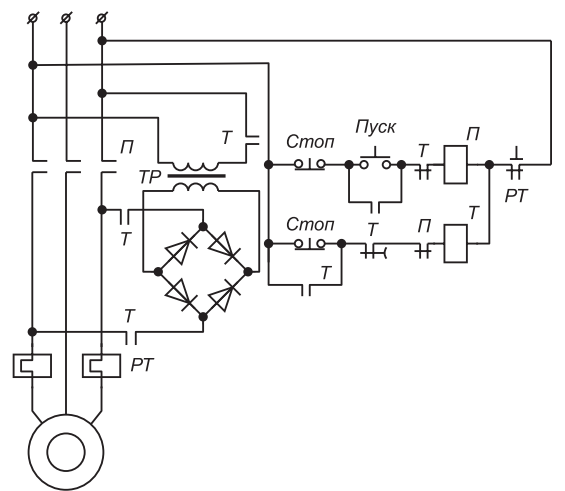
Рис. 4. Схема управления асинхронным электродвигателем с динамическим торможением
При этом размыкается блок-контакт К3 в цепи катушки КТ. Двигатель разгоняется при включении обмоток цепи в «звезду». Через 5—10 с (в зависимости от установленной выдержки времени) размыкается замыкающий контакт реле времени РВ. Это приводит к отключению контактора К3 и включению контактора КТ. Одновременное включение контакторов К3 и КТ исключается размыкающим блок-контактом К3.
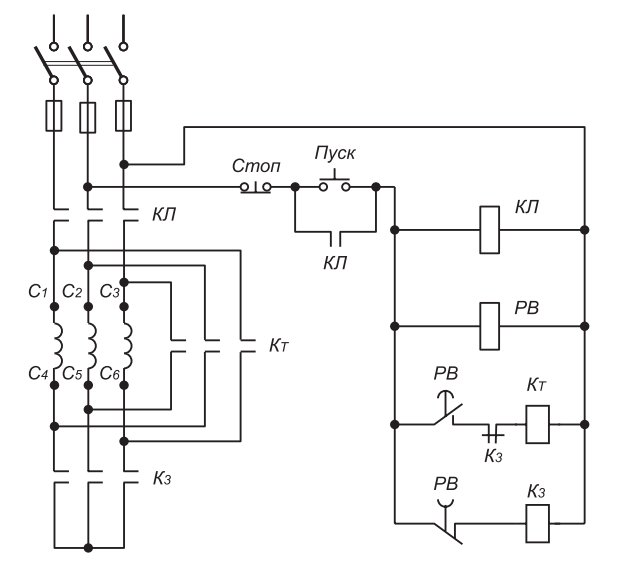
Рис. 5. Схема управления асинхронным электродвигателем с переключением при пуске обмотки статора со «звезды» на «треугольник»
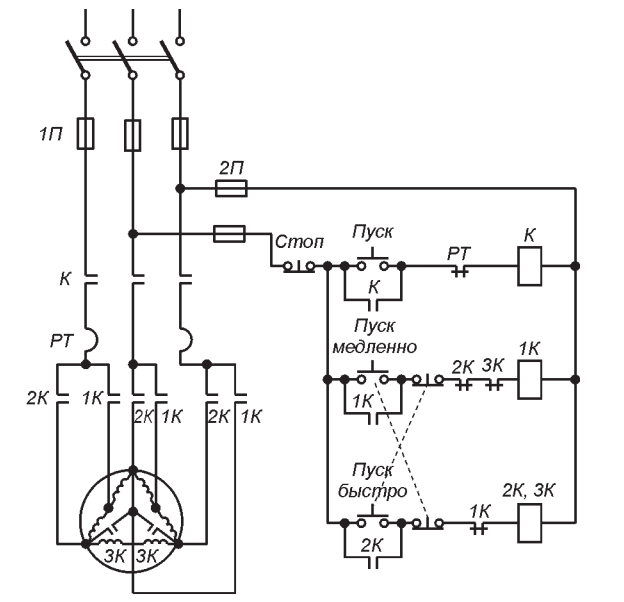
Рис. 6. Электрическая схема управления двухскоростным асинхронным электродвигателем
Схема управления двухскоростным асинхронным электродвигателем (рис. 6). Конструкция многоскоростного асинхронного электродвигателя позволяет изменять число полюсов обмотки статора. Изменение числа пар полюсов меняет скорость вращения асинхронного электродвигателя. Для производственных механизмов, требующих две скорости вращения, отличающиеся в два раза, применяют двухскоростные асинхронные электродвигатели. Нажимая кнопку «Пуск», включают контактор К, который своими главными контактами подготавливает цепь включения статора двигателя. Воздействуя на кнопку
«Пуск медленно», включают контактор 1К, который подключает обмотку статора, соединенную в треугольник. Если необходимо увеличить скорость, нажимают кнопку «Пуск быстро». Образуется замкнутая цепь питания параллельно включенных катушек 2К и 3К. При этом число пар полюсов уменьшается вдвое, и электродвигатель вращается с большей скоростью.
Схема управления реверсивным двухскоростным электродвигателем (рис. 7). Нажатием кнопок «Пуск 1» или «Пуск 2» устанавливают необходимую частоту вращения при соединениях обмоток двигателя в «треугольник» или в «двойную звезду». Контакторы В или Н включаются нажатием кнопок
«Пуск вперед» или «Пуск назад». Двухцепные кнопки позволяют осуществить дополнительную блокировку, исключающую одновременное включение контакторов В, Н и 1К, 2К.
Торможение асинхронного электродвигателя противовключением (рис. 8). При торможении противовключением электродвигатель включается на время торможения в сеть с соединением обмоток статора с противоположным направлением вращения. При этом необходимо, чтобы двигатель отключился от сети в момент достижения скорости вращения, близкой к нулю.
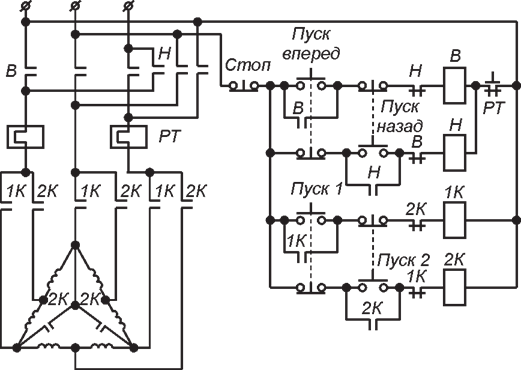
Рис. 7. Схема управления реверсивным двухскоростным электродвигателем
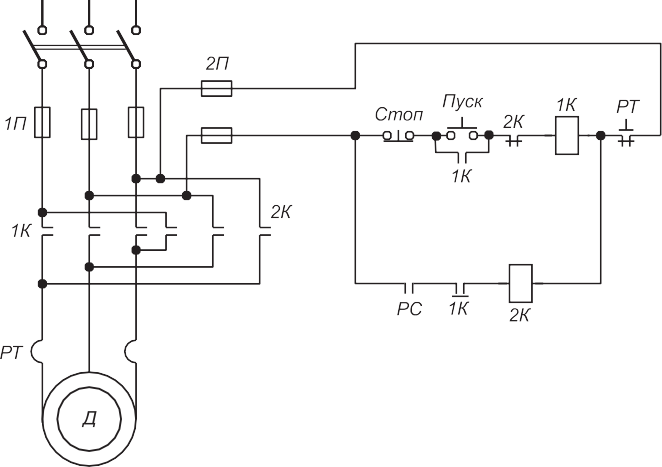
Рис. 8. Торможение асинхронного короткозамкнутого электродвигателя противовключением
Для этого в цепь катушки контактора 2К включены замыкающие контакты реле контроля скорости РС, работающего от вала двигателя. При работе двигателя эти контакты замкнуты, а размыкающие контакты контактора 1К разомкнуты и контактор торможения 2К отключен. В режиме торможения, когда нажата кнопка «Стоп», катушка 1К обесточивается, электродвигатель отключается от сети. Одновременно размыкающий дополнительный контакт 1К замыкается и включает контактор торможения 2К. При достижении скорости, близкой нулю, реле РС срабатывает, его контакт отключает цепь питания контактора 2К и двигатель затормаживается.
Схема управления реверсивным электродвигателем с торможением противовключением и использованием реле контроля скорости (рис. 9). При нажатии кнопок «Вперед» или «Назад» замыкаются соответственно цепи катушек контакторов В или Н, срабатывают их контакты, статор двигателя подключается к сети, ротор начинает вращаться.
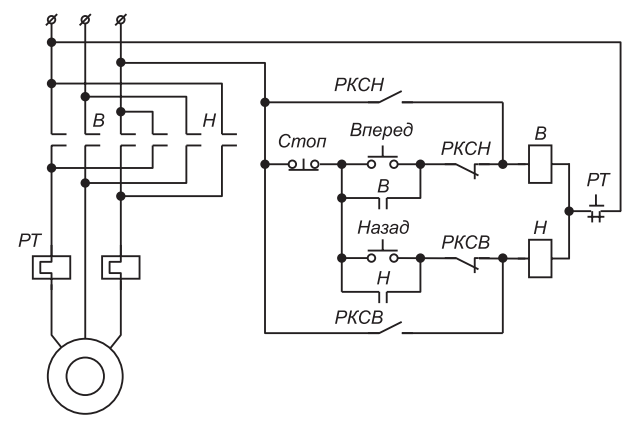
Рис. 9. Схема управления реверсивным электродвигателем с торможением противовключением
Одновременно с началом вращения приводится в действие вал реле контроля скорости и замыкаются соответствующие контакты реле РКСВ или РКСН, которые подготавливают цепи катушек контакторов «Вперед» или «Назад» к работе (при работе двигателя в режиме «Вперед» подготавливается к работе цепь катушки контактора
«Назад», и наоборот). При остановке двигателя, когда нажата кнопка «Стоп», разрывается цепь работающей катушки («Вперед» или «Назад»), главные контакты отключают двигатель от сети, а блок-контакты замыкают цепь катушки контактора «Назад» в том случае, когда двигатель работал вращаясь «Вперед», и наоборот. Таким образом, двигатель переключается в реверсивный режим, однако по инерции продолжает вращаться в прежнем направлении, работая в тормозном режиме противовключения. Из-за действия тормозного момента частота вращения ротора постепенно снижается и при достижении частоты, близкой к нулю, контакты реле контроля скорости размыкают цепи катушек контакторов
«Вперед» или «Назад» и отключают статор двигателя от сети.
2. Управление электроприводами с асинхронными электродвигателями с фазным ротором
Схема управления в функции времени (рис. 10). Эта схема является типичной для двигателей длительного режима с использованием маятниковых реле времени. При нажатии кнопки «Пуск» включается контактор Л. При включении контактора Л начинает работать маятниковое реле, которое через заданный промежуток времени включит своими контактами контактор 1У. Далее процесс повторяется. Замыкающий блок-контакт Л (1—2) предназначен для облегчения работы контактов маятникового реле.
Схема управления в функции времени с несколькими реле времени (рис.11).
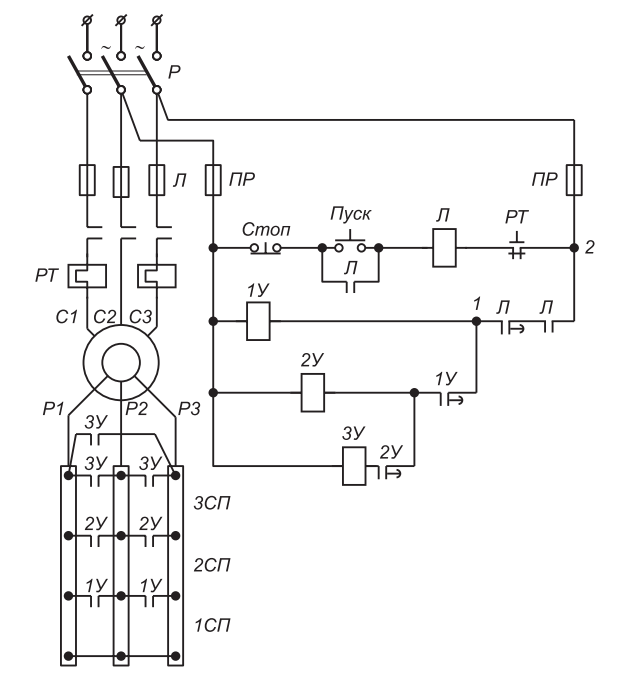
Рис. 10. Схема управления асинхронным электродвигателем с фазным ротором в функции времени
Асинхронный электродвигатель с фазным ротором пускают с помощью пусковых реостатов, состоящих из нескольких ступеней, включаемых в фазы обмоток ротора.
При нажатии на кнопку «Пуск» катушка магнитного пускателя ПМ получает питание, и электродвигатель включается на полное сопротивление пускового реостата. Одновременно включается реле времени 1РВ, которое через выдержку времени, достаточную для разгона двигателя на этой ступени, включает контактор 1К, и он своими контактами закорачивает первую ступень пускового реостата. Блок-контакты контактора блокируют катушку 1К и отключают реле времени 1РВ.
Включается одновременно с катушкой 1К реле времени 2РВ, которое через заданную выдержку времени включает второй контактор 2К, а он отключает вторую ступень пускового реостата. Третья ступень пускового реостата отключается аналогично.
Необходимо обеспечивать выбор правильных выдержек времени реле 1РВ, 2РВ и 3РВ. Чрезмерно большие выдержки времени затягивают процесс пуска, а заниженные — не обеспечивают разгон до нужной скорости и вызывают повышенные броски тока. При нажатии на кнопку «Стоп» электродвигатель отключается, и все ступени пускового реостата включаются по фазам ротора.
Схема управления в функции тока (рис. 12). В роторную цепь включены катушки токовых реле ускорения 1РУ, 2РУ, 3РУ, настроенные на срабатывание при токах I1РУ, I2РУ, I3РУ. Контактор 1У включается при спаде силы пускового тока в роторной цепи до значения, соответствующего уставке реле 1РУ.
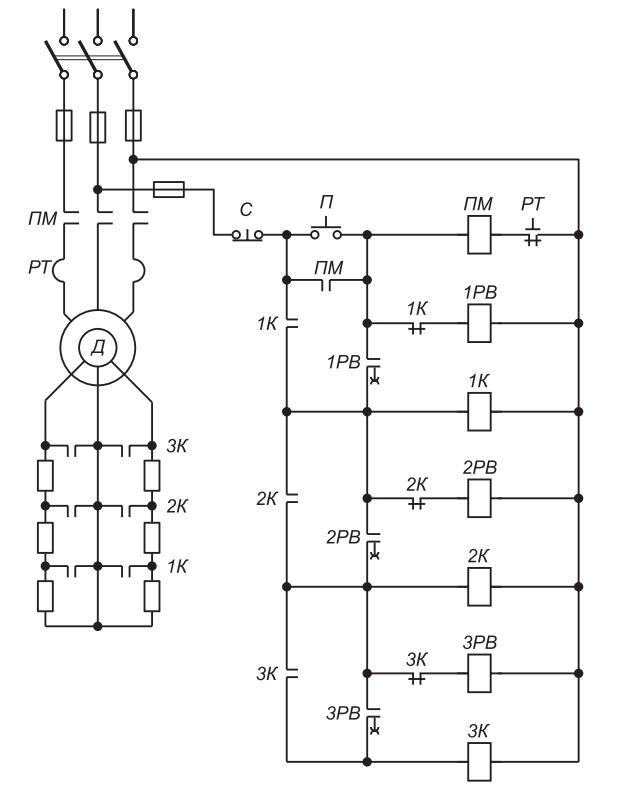
Рис. 11. Электрическая схема управления асинхронным электродвигателем с фазным ротором
При большей силе тока в цепи ротора размыкающий контакт 1РУ будет разомкнут. Реле ускорения 2РУ и 3РУ, контакторы 2У и 3У работают так же. Из-за возможности вибраций размыкающих контактов реле ускорения 1РУ, 2РУ и 3РУ предусмотрено их шунтирование размыкающими блок-контактами 1У, 2У и 3У. Реле блокировки РБ создает выдержку времени, пока сила тока в роторной цепи не достигнет значения, при котором сработает реле ускорения.
Схема управления в функции частоты (рис. 13). Работа этой схемы обеспечивается с помощью частотных реле 1ЧР, 2ЧР и 3ЧР, катушки которых включены в цепь ротора. Магнитный поток реле создается совместным действием магнитодвижущих сил катушки и короткозамкнутого витка (гильзы). При пуске, т.е. при большой частоте переменного тока в роторе двигателя, размагничивающее действие тока, протекающего по витку, будет велико, и магнитный поток реле будет относительно мал. При уменьшении частоты тока в роторе магнитный поток реле возрастает, так как происходит уменьшение тока в короткозамкнутом витке. При каком-то определенном значении частоты якорь притягивается и замыкает контакты реле частоты (1ЧР, 2ЧР и 3ЧР) в цепи контактора ускорения (1У, 2У и 3У). При оживлении током катушки контактора ускорения происходит шунтирование его контактами соответствующей ступени пускового сопротивления, включенного в цепь ротора. Частотные реле должны быть настроены на определенные частоты.
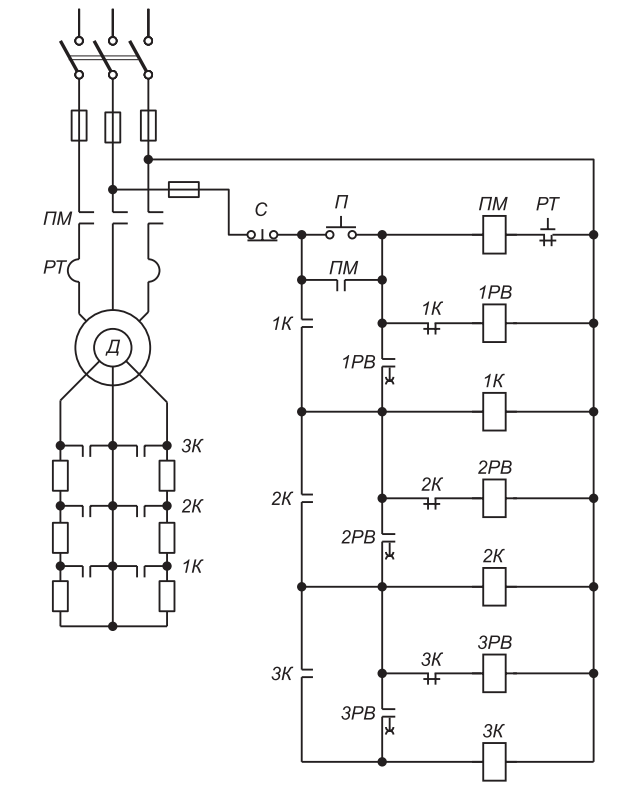
Рис. 12. Схема управления асинхронным электродвигателем с фазным ротором в функции силы тока
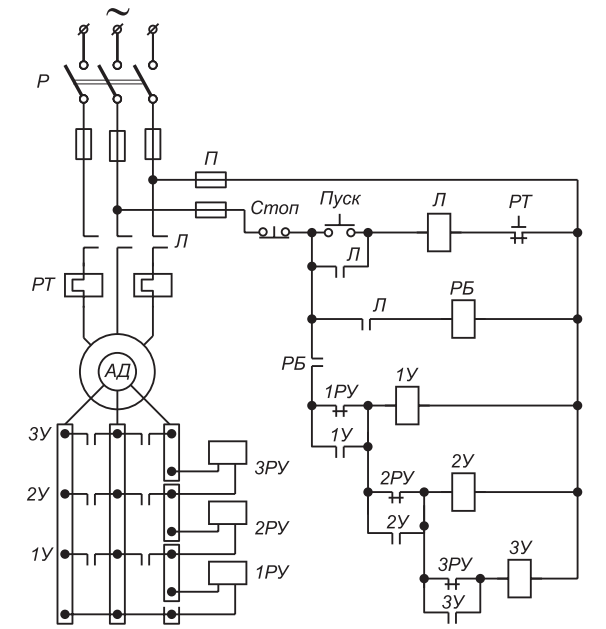
Рис. 13. Схема управления асинхронным электродвигателем с фазным ротором в функции частоты







