- Шаговый двигатель дисковод схема
- AVR-STM-C++
- суббота, 6 апреля 2019 г.
- Шаговый двигатель из CD/DVD привода
- КАК ПОДКЛЮЧИТЬ МОТОР ОТ DVD ИЛИ HDD
- Схема драйвера мотора
- Видео подключения мотора HDD
- Как работает шаговый электродвигатель?
- Что такое шаговый двигатель?
- Преимущества и недостатки шагового электродвигателя
- Устройство и принцип работы
- Типы шаговых двигателей
- По конструкции ротора
- Реактивный
- С постоянными магнитами
- Гибридные
- По виду обмоток
- Униполярный
- Биполярный
- Подключение шагового двигателя
- Типичные схемы подключения ШД
- Управление шаговым двигателем
- Без контроллера
- С контроллером
- Популярные схемы управления ШД
- Простейший драйвер шагового двигателя своими руками
- Полезное видео
Шаговый двигатель дисковод схема
 Однажды, разбирая коробку с компьютерным хламом, я обнаружил у себя несколько дисководов от от старых 3-х дюймовых гибгих дисков. В свое время я извлек из них шаговые двигатели, а выбросить оставшиеся внутренности не поднялась рука. Сейчас мое внимание привлек двигатель для вращения дисков. Он выполнен самостоятельным блоком на отдельной печатной плате вместе с контроллером привода.
Однажды, разбирая коробку с компьютерным хламом, я обнаружил у себя несколько дисководов от от старых 3-х дюймовых гибгих дисков. В свое время я извлек из них шаговые двигатели, а выбросить оставшиеся внутренности не поднялась рука. Сейчас мое внимание привлек двигатель для вращения дисков. Он выполнен самостоятельным блоком на отдельной печатной плате вместе с контроллером привода.
Задача состояла в том, как его запустить. Поиск решения в сети Internet по запуску такого двигателя не дал какого-либо положительного результата. Было множество статей по использованию шаговых двигателей позиционирующих магнитную головку и практически ничего по запуску «блина» — двигателя вращения диска. Единственная обнаруженная статья была на английском языке, но там описывался очень древний и конкретный дисковод. В общем пришлось искать способ запуска самостоятельно.
С чего я начал. К плате управления подходит шлейф из 4-5 цветных проводов в зависимости от типа дисковода. Два из них подают питание 12V (это было не трудно проследить), и как правило имеют цвета черный(общий) и красный(+). Оставшиеся провода, как я предположил, должны управлять пуском двигателя и скорее всего имеют ТТЛ уровни.
На плате я также обнаружил два фотоэлемента: один на краю платы — он определяет, что диск вставлен в приемник; второй фотоэлемент стоит ближе к центру двигателя — он позиционирует начальное положение диска в котором имеется соответсвующее отверстие. Нас интересует первый (удаленный) фотоэлемент, так как при вставленном диске мотор уже начинает вращаться (в подключенном к компьютеру дисководу).
Фотография контроллера с мотором от дисковода фирмы TEAC приведена на рисунке 1.
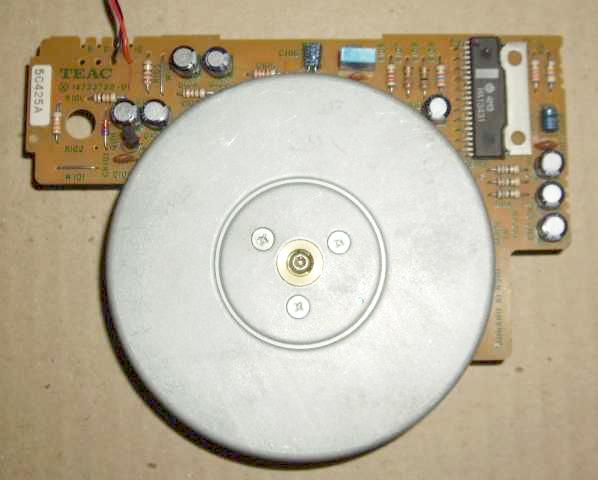
Puc.1
Далее, проследив на плате цепь от фотоэлемента, я установил, что она через транзистор поступает на вход управления микросхемы H13431 — контроллер двигателя (описание этой микросхемы нашел только на японском языке). На тот же транзистор подключен через диод один из проводов входного шлейфа.
Далее — дело техники. Подал на плату питание 12 вольт. Через резистор номиналом 3,3 ком вычисленный контак соединил с плюсом питания. ВСЕ. Двигатель начал вращаться!
Фрагмент платы с установленныи резистором показан на рисунке 2. Крайний левый контакт не задействован (видимо какой-то выходной сигнал). Следы пайки на плате — моя оплошность: подал на входной контакт непосредственно напряжение питания 12В и сжег транзистор, далее действовал осторожнее — через резистор номиналом 3,3 ком.
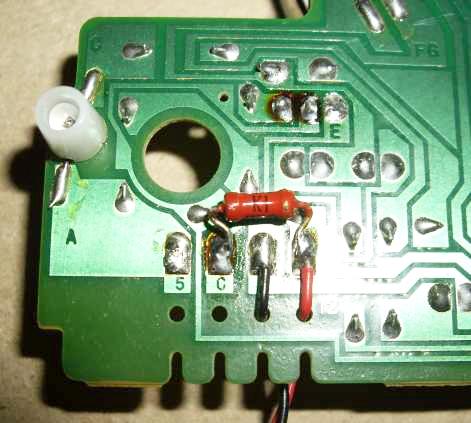
Puc.2
На другом дисководе (рис.3) с названием Sankyo и микросхемой контроллера M51784 пошел таким же путем (описание этой микросхемы есть на сайте www.datasheetcatalog.com). Нашел входной контакт на плате который выходит через резистор на управляющий транзистор и фотоэлемент. Также через резистор подал на него положительный потенциал. И. тишина. Попробовал поочередно позамыкать на «землю» оставшиеся два входных контакта. Заработало. Что это за контакт я не стал выяснять.

Puc.3
Увеличенный фрагмент второй доработанной платы приведен на рисунке 4. «Земляной» контакт и контакт от него слева запаяны вместе. Крайний левый контакт остался свободным.
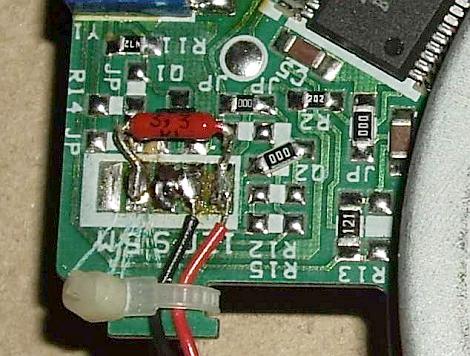
Puc.4
Таким образом порядок подключения неизвестного дисковода достаточно прост:
1. Находим провода питания (обычно красный+ и черный-).
2. Пытаемся найти цепь управляющего транзистора и фотоэлемента (примерная схема на рис.5).
3. Если двигатель не вращается оставшиееся контакты замыкаем на «землю» (или подаем на них положительный потенциал через ограничительный резистор в несколько ком).
Puc.5
Дальнейшие эксперимены с двигателем показали, что он работоспособен в диапазоне питающих напряжений от 7 до 12 вольт. При этом скорость вращения его очень стабильна, так как задается кварцевым или пъезокерамическим резонатором. Кстати можно попытаться поставить резонатор на другую частоту тем самым изменив скорость вращения. На моих платах резонатор выполнен в виде пластмассового прямоугольника синего цвета — его легко найти.
Применение данного двигателя оставляю на вашу фантазию. Желаю удачи!
AVR-STM-C++
суббота, 6 апреля 2019 г.
Шаговый двигатель из CD/DVD привода
Попались в мои руки несколько приводов оптических дисков, которые я разобрал. В итоге помимо плат и прочей механики стал обладателем нескольких шаговых двигателей, которые позиционируют лазерную головку. Захотелось их как-то использовать, но информации по ним фактически никакой. После продолжительного и настойчивого гугления информацию я таки нашел и решил поделится ею с вами.
Итак, шаговый двигатель cd rom

Он имеет маркировку 0550902, чуть ниже 15RF 172KP, хотя можно прочитать и слитно, получится 15RF172KP. Так же маркировка на шлейфе 3 e232171. С обратной стороны выгравировано SM15DD — это тип винта двигателя.

После длительных поисков datasheet я нашел каталог продукции фирмы MOATECH, в котором и упоминается данный двигатель из сд привода. Это двигатель SPS-15RF-172KP, в каталоге есть небольшое упоминание SPS-15RF Type, где присутствует позиция 172FH.
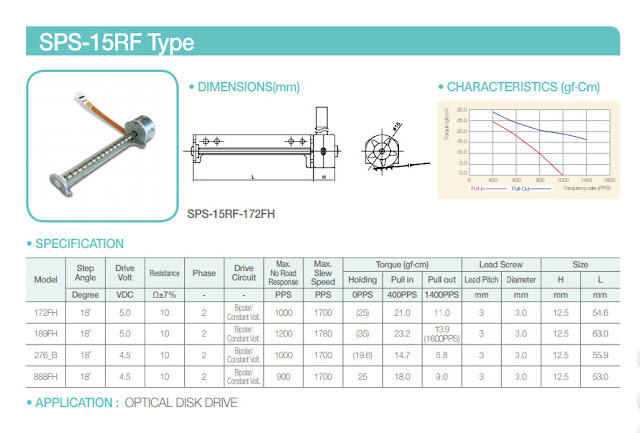
Пусть последние буквы маркировки и не совпадают, но думаю, что это одно и то же. Давайте теперь посмотрим, что же это за шаговик такой.
Характеристики шагового двигателя
В табличке есть данные по сопротивлению обмоток, 10 Ом на обмотку, я проверил — мультиметр показал 10 Ом. Так же можно увидеть угол поворота — 18 градусов на шаг. И, самое важное, напряжение питания двигателя — 5 вольт. Идеально для использования с AVR микроконтроллерами или Arduino.
Этот двигатель dvd привода имеет две фазы, видим, что он биполярный (это должно быть и так ясно, исходя из количества выводов). Для таких двигателей необходимы специальные драйвера управления, в следующей статье будем собирать свой драйвер на полевых транзисторах. Это обусловлено их принципом работы. Давайте посмотрим, как управлять биполярным шаговым двигателем.
Распиновка шагового двигателя
Тут все предельно просто, имеем четыре вывода и две обмотки — по два вывода на обмотку.

Я промаркировал выводы обмоток приписав плюс и минус дабы не путаться где первая обмотка, а где вторая, хотя было бы более правильно написать первый вывод и второй.
Управление биполярным шаговым двигателем
Вот и добрались до вопроса как управлять шаговым двигателем. Это довольно сложный процесс в плане реализации, так как из-за наличия двух фаз нужно подавать напряжение на обмотку в разные стороны. Тоесть в какой-то момент мы подаем плюс на первый вывод первой обмотки, на второй вывод этой же обмотки минус, а в какой-то момент нужно подать наоборот — плюс на второй вывод первой обмотки и минус на первый вывод первой обмотки. Для того, чтоб двигатель вращался, ток на обмотки нужно подавать вот в такой последовательности

Я привел схему подачи тока на биполярный шаговый двигатель в виде четырех полных шагов двигателя. Чтоб двигатель вращался, достаточно после четвертого шага выполнить первый шаг и продолжить дальше. Чтоб двигатель вращался в обратную сторону, то шаги нужно выполнять с обратной последовательности, например 4-3-2-1-4-3. и так далее.
Эта схема управления не такая уж сложная, но в плане подачи тока могут возникнуть затруднения. Но об этом мы поговорим в следующей статье, а сейчас давайте вернемся к нашим двигателям. Я описал только один, а у меня их два.
Второй двигатель выглядит точно так же, как и первый, но имеет другую маркировку — 172F p10816H1. Тем не менее это тот же самый SPS-15RF, который с этой же буквой F после 172 есть в первой позиции таблички из каталога. Так что идентификация обоих двигателей успешно произведена, технические характеристики определены и можно приступать к повторному использованию этих шаговиков.
КАК ПОДКЛЮЧИТЬ МОТОР ОТ DVD ИЛИ HDD
Как-то давно попалась мне на обозрение схема драйвера шагового двигателя на микросхеме LB11880, но поскольку такой микросхемы у меня не было, а двигателей валялось несколько штук, отложил интересный проект с запуском моторчика в долгий ящик. Прошло время, и вот сейчас с освоением Китая с деталями проблем нет, так что заказал МС, и решил собрать и протестировать подключение скоростных моторов от HDD. Схема драйвера взята стандартная:
Схема драйвера мотора

Далее идёт сокращённое описание статьи, полное читайте здесь. Двигатель, вращающий шпиндель жесткого диска (или CD/DVD-ROM) — это обычный синхронный трёхфазный мотор постоянного тока. Промышленность выпускает готовые однокристальные драйверы управления, которым к тому же не требуются датчики положения ротора, ведь в роли таких датчиков выступают обмотки двигателя. Микросхемы управления трёхфазными двигателями постоянного тока, которым не требуются дополнительные датчики, являются TDA5140; TDA5141; TDA5142; TDA5144; TDA5145 и конечно же LB11880.
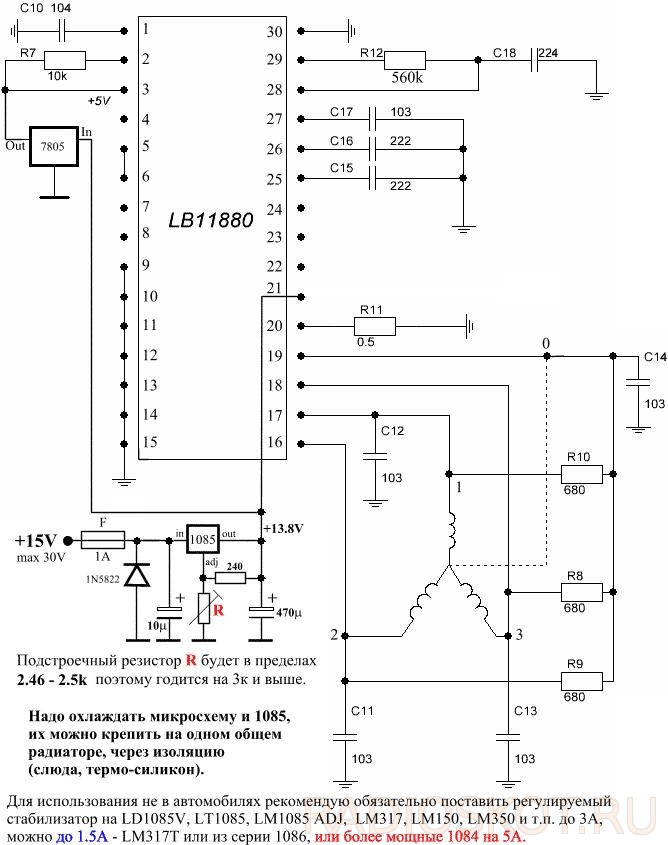
Двигатель, подключенный по указанным схемам, будет разгоняться до тех пор, пока либо не наступит предел по частоте генерации VCO микросхемы, которая определяется номиналами конденсатора подключенного к выводу 27 (чем его ёмкость меньше, тем выше частота), либо двигатель не будет разрушен механически. Не следует слишком уменьшать ёмкость конденсатора подключенного к выводу 27, так как это может затруднить пуск двигателя. Регулировка скорости вращения производится изменением напряжения на выводе 2 микросхемы, соответственно: Vпит — максимальная скорость; 0 — двигатель остановлен. От автора имеется и печатка, но я развёл свой вариант, как более компактный.

Позже пришли заказанные мной микросхемы LB11880, запаял в две готовые платки и провёл тест одной из них. Всё прекрасно работает: скорость регулируется переменником, обороты определить трудно но думаю до 10000 есть точно, так как двигатель гудит прилично.

В общем, начало положено, буду думать куда применить. Есть мысль сделать из него такой же точильный диск как у автора. А сейчас тестировал на куске пластика, сделал типа вентилятора, дует просто зверски хоть на фото даже не видно как он крутится.

Поднять обороты выше 20000 можно переключением ёмкостей конденсатора С10 и подачей питания МС до 18 В (18,5 В предел). На этом напряжении у меня мотор свистел капитально! Вот видео с питанием в 12 вольт:
Видео подключения мотора HDD
Подключил ещё двигатель от CD, погонял при питании 18 В, поскольку в моём внутри шарики, разгоняется так, что прыгает всё вокруг! Жаль не отследить обороты, но если судить по звуку то она очень большая, до тонкого свиста. Куда применять такие скорости, вот вопрос? Приходит на ум мини болгарка, настольная дрель, точильный станок. Применений много — думайте сами. Собирайте, тестируйте, делитесь впечатлениями. В интернете есть множество обзоров с применением данных двигателей в интересных самодельных конструкциях. В интернете видео видел, там кулибины с этими моторами помпы мастерят, супер вентиляторы, точилки, покумекать можно куда такие скоростя применить, мотор тут разгоняется свыше 27000 оборотов. С вами был Igoran.
Форум по обсуждению материала КАК ПОДКЛЮЧИТЬ МОТОР ОТ DVD ИЛИ HDD
Как работает шаговый электродвигатель?
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
На рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
 С переменным магнитным сопротивлением
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
 С постоянным магнитом
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
 Устройство гибридного шагового двигателя
Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
 Расположение пазов гибридника
Расположение пазов гибридника
Из-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
 Рис. 6. Принцип работы гибридного ШД
Рис. 6. Принцип работы гибридного ШД
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
 Униполярный ШД
Униполярный ШД
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
 Схема а) с различными, б) с одним выводом
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
 Биполярный шаговый двигатель
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
 Схемы подключения различных типов шаговых двигателей
Схемы подключения различных типов шаговых двигателей
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
 Волновое управление
Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
 Полношаговое управление
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
 Полушаговое управление
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
 Схема Н-моста
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
 Подключение через контроллер однополярного шагового двигателя
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
 Схема управления от контроллера с выходом типа «открытый коллектор»
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
 Схема простейшего драйвера
Схема простейшего драйвера
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.







