Динамическое торможение ДПТ
Динамическое торможение осуществляется при замыкании вращающегося якоря двигателя на тормозное сопротивление после отключения его от сети. Обмотка возбуждения двигателя должна оставаться подключённой к сети. При этом осуществляется генераторное торможение двигателя с отдачей энергии тормозному сопротивлению.
Схема динамического торможения двигателя постоянного тока с параллельным возбуждением и механические характеристики естественная и динамического торможения в относительных единицах показаны на рис. 3.3, а, б.

Рис. 3.3. — Схема динамического торможения двигателя постоянного тока
с параллельным возбуждением (а) и механические характеристики
естественная и динамического торможения (б)
Графический способ расчёта. Графический способ расчёта сопротивления динамического торможения выполняется в следующей последовательности (см. рис. 3.7,б):
1. Задаются (или он должен быть задан) начальным тормозным моментом в пределах допустимого значения по условиям коммутации:
 .
.
2. Строят во втором квадранте механическую характеристику динамического торможения по двум точкам с координатами [ν = νС, μ = μТ.НАЧ.] и [ν = 0, μ = 0].
3. В первом квадранте проводят прямую, параллельную механической характеристике динамического торможения, и находят точку пересечения её с прямой μ = 1, соответствующей номинальному моменту двигателя (точка «с»).
4. Находят численное значение тормозного сопротивления в относительных единицах, которое равно отрезку, отсекаемому при μ = 1 естественной характеристикой и прямой, параллельной механической характеристике динамического торможения (отрезок «в–с»).
5. Определяют динамическое тормозное сопротивление по формуле:
 .
.
Аналитический способ расчёта. При динамическом торможении ток якоря, протекающий в замкнутом контуре торможения:
 .
.
Подставим вместо Е максимально возможную величину ЭДС Емакс. и вместо IТ ток IТ.НАЧ., получим
 .
.
Полагая Емакс. ≈ UH (торможение со скорости идеального холостого хода), что ведёт к некоторому увеличению тормозного сопротивления, будем иметь
 .
.
Двигатели параллельного возбуждения
 Схема двигателя.
Схема двигателя.
Схема двигателя параллельного возбуждения изображена на рис. 1.25. Обмотка якоря и обмотка возбуждения включены параллельно. В этой схеме: I – ток, потребляемый двигателем из сети, Iя – ток якоря, Iв – ток возбуждения. Из первого закона Кирхгофа следует, что I = Iя + Iв.
Естественная механическая характеристика. Естественная механическая характеристика описывается формулой (1.6).
При холостом ходе М = 0 и nх = U/СЕФ.
Если Ф = const, то уравнение механической характеристики принимает вид:
Из (1.8) следует, что механическая характеристика (рис. 1.26, прямая 1) – прямая с углом наклона a и угловым коэффициентом b. Так как у двигателей постоянного тока Rя мало, то с увеличением нагрузки на валу частота вращения n изменяется незначительно – характеристики подобного типа называются «жесткими».
Ток, потребляемый двигателем из сети, практически растет пропорционально моменту нагрузки. Действительно, М » Мэм = См Iя Ф, и так как у двигателя параллельного возбуждения Ф = const, то Iя
Регулирование частоты вращения.
Регулирование частоты вращения возможно из (1.6) тремя способами: изменением магнитного потока главных полюсов Ф, изменением сопротивления цепи якоря Rя и изменением подводимого к цепи якоря напряжения U (изменение n за счет изменения момента нагрузки М в понятие регулирования не входит).
 Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Регулирование n изменением магнитного потока Ф осуществляется с помощью регулировочного реостата Rр. При увеличении сопротивления реостата ток возбуждения Iв и магнитный поток главных полюсов Ф уменьшаются. Это приводит, во-первых, к увеличению частоты вращения холостого хода nх и, во-вторых, к увеличению коэффициента b, т.е. к увеличению угла наклона механической характеристики. Однако b остается небольшим и жесткость механических характеристик сохраняется. На рис. 1.28 помимо естественной характеристики 1, соответствующей максимальному магнитному потоку Ф, приведено семейство механических характеристик 2-4, снятых при уменьшенном магнитном потоке. Из характеристик следует, что изменением магнитного потока можно только увеличивать частоту вращения относительно естественной характеристики. Практически частоту вращения таким методом можно увеличивать не более чем в 2 раза, так как увеличение скорости приводит к ухудшению коммутации и даже механическим повреждениям машины.
Другой способ регулирования скорости связан с включением последовательно с якорем регулировочного реостата Rя.р (пусковой реостат Rп для этой цели непригоден, так как он рассчитан на кратковременный режим работы). Формула (1.6) при этом принимает вид:
n =  ,
,
откуда следует, что скорость при холостом ходе при любом сопротивлении Rя.р одинакова, а коэффициент b и, следовательно, наклон механических характеристик 5-7 увеличивается (рис. 1.26). Регулирование частоты вращения этим способом приводит к уменьшению частоты вращения относительно естественной характеристики. Кроме того, оно неэкономично, так как связано с большой мощностью потерь (Rя.р I ) в регулировочном реостате, по которому протекает весь ток якоря.
) в регулировочном реостате, по которому протекает весь ток якоря.
 Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Третий способ регулирования частоты вращения – безреостатное изменение подводимого к якорю напряжения. Он возможен только в случае, когда якорь двигателя питается от отдельного источника, напряжение которого можно регулировать. В качестве регулируемого источника применяются отдельные, специально предназначенные для данного двигателя генераторы или управляемые вентили (тиратроны, ртутные выпрямители, тиристоры). В первом случае образуется система машин, называемая системой Г-Д (генератор – двигатель), (рис. 1.27). Она применяется для плавного регулирования в широких пределах частоты вращения мощных двигателей постоянного тока и в системах автоматического управления. Система регулирования с управляемыми вентилями УВ (рис. 1.28) находит применение для регулирования частоты вращения двигателей меньшей мощности. Ее преимущество – большая экономичность.
Регулирование частоты вращения изменением U практически возможно только в сторону уменьшения, так как увеличение напряжения выше номинального недопустимо из-за резкого ухудшения коммутации. Из (1.9) следует, что при уменьшении напряжения уменьшается скорость холостого хода nх, а наклон механических характеристик 8-10 не изменяется (см. рис. 1.26), они остаются жесткими даже при низких напряжениях. Диапазон регулирования (nmax/nmin) таким способом 6:1-8:1. Он может быть значительно расширен при применении специальных схем с обратными связями.
Регулировочная характеристика.
Регулировочная характеристика n=f(Iв) двигателя параллельного возбуждения изображена на рис. 1.29.
Ее характер определяется зависимостью (1.5), из которой следует, что частота вращения обратно пропорциональна магнитному потоку и, следовательно, току возбуждения Iв. При токе возбуждения Iв = 0, что может быть при обрыве цепи возбуждения, магнитный поток равен остаточному Фост и частота вращения становится настолько большой, что двигатель может механически разрушиться, – подобное явление называется разносом двигателя.
Физически явление разноса объясняется тем, что вращающий момент (1.2) при уменьшении магнитного потока, казалось бы, должен уменьшиться, однако ток якоря Iя = (U – E)/Rя увеличивается значительнее, так как уменьшается Е (1.1) и разность U – E увеличивается в большей степени (обычно Е » 0,9 U).
 Тормозные режимы.
Тормозные режимы.
Тормозные режимы двигателя имеют место тогда, когда электромагнитный момент, развиваемый двигателем, действует против направления вращения якоря. Они могут возникать в процессе работы двигателя при изменении условий работы или создаваться искусственно с целью быстрого уменьшения скорости, остановки или реверсирования двигателя.
У двигателя параллельного возбуждения возможны три тормозных режима: генераторное торможение с возвратом энергии в сеть, торможение противовключением и динамическое торможение.
Генераторное торможение возникает в тех случаях, когда частота вращения якоря n становится больше частоты вращения при идеальном (т.е. при Мпр = 0) холостом ходе nx (n>nx). Переход в этот режим из режима двигателя возможен, например, при спуске груза, когда момент, создаваемый грузом, приложен к якорю в том же направлении, что и электромагнитный момент двигателя, т.е. тогда, когда момент нагрузки действует согласно с электромагнитным моментом двигателя и он набирает скорость, большую чем nx. Если n>nx, то Е>Uc (где Uc – напряжение сети) и ток двигателя изменяет свой знак (1.4) – электромагнитный момент из вращающего становится тормозным, а машина из режима двигателя переходит в режим генератора и отдает энергию в сеть (рекуперация энергии). Переход машины из двигательного режима в генераторный иллюстрируется механической характеристикой (рис. 1.30). Пусть в двигательном режиме a1 – рабочая точка; ей соответствует момент М. Если частота вращения увеличивается, то рабочая точка по характеристике 1 из квадранта I переходит в квадрант II, например, в рабочую точку a2, которой соответствует частота вращения n΄ и тормозной момент – М΄.
Торможение противовключением возникает в работающем двигателе, когда направление тока в якоре или тока возбуждения переключается на противоположное. Электромагнитный момент при этом изменяет знак и становится тормозным.
Работе двигателя с противоположным направлением вращения соответствуют механические характеристики, располагающиеся в квадрантах II и III (например, естественная характеристика 2 на рис. 1.30).
Внезапный переход на эту характеристику практически недопустим, так как сопровождается чрезмерно большим броском тока и тормозного момента. По этой причине одновременно с переключением одной из обмоток в цепь якоря включается добавочное сопротивление Rдоб, ограничивающее ток якоря.
Механическая характеристика режима с Rдоб имеет большой наклон (прямая 3). При переходе в режим противовключения частота вращения n в первый момент измениться не может (из-за инерционности якоря) и рабочая точка из положения a1 перейдет в положение a3 на новой характеристике. Из-за появления Мтор частота вращения n будет быстро падать до тех пор, пока рабочая точка a3 не перейдет в положение a4, соответствующее остановке двигателя. Если в этот момент двигатель не отключить от источника питания, то якорь изменит направление вращения. Машина начнет работать в двигательном режиме с новым направлением вращения, а ее рабочая точка a5 будет находиться на механической характеристике 3 в квадранте III.
 Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
Динамическое торможение возникает в тех случаях, когда якорь двигателя отключается от сети и замыкается на сопротивление динамического торможения Rд.т. Уравнение характеристики (1.6) принимает вид:
n = 
что соответствует семейству прямых 4 (при разных Rд.т), проходящих через начало координат. При переключении в этот режим рабочая точка a1 переходит на одну из характеристик 4, например, в точку a6, а затем перемещается по прямой 4 до нуля. Якорь двигателя тормозится до полной остановки. Изменением сопротивления Rд.т можно регулировать ток якоря и скорость торможения.
Пуск, реверсирование и торможение двигателей постоянного тока
 Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(M н) и n = f2 (I я ) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
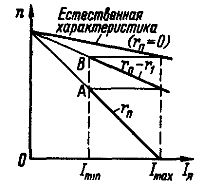
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
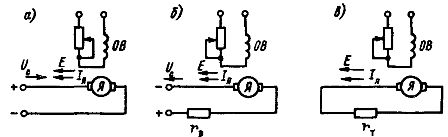
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.

Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.







