- Подключение шагового двигателя к Ардуино
- Принцип работы шагового двигателя
- Драйвер шагового двигателя Ардуино
- Как подключить шаговый двигатель к Ардуино
- Реверсивные шаговые двигатели
- Шаговый Двигатель Схема Подключения
- Сморите видео
- Виды шаговых двигателей по типу ротора:
- Технические характеристики A4988
- Общие сведения:
Подключение шагового двигателя к Ардуино

Шаговый двигатель 28byj-48 Arduino ► предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим управление шаговым двигателем от Ардуино
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый двигатель 28BYJ-48;
- провода «папа-мама».
Реверсивные шаговые двигатели




![]()
![]()
Для осуществления реверса зубцы статора и ротора ШД должны быть симметричными (без клювообразных выступов). Рассмотрим работу двухфазного двухполюсного ШД с активным ротором в виде постоянного магнита. Будем считать, что намагничивающие силы фаз (НС) распределены по синусоидальному закону.
При включении фазы под постоянное напряжение (условно положительной полярности) вектор НС статора совпадет с осью фазы А. В результате взаимодействия НС статора с полем постоянного магнита ротора возникнет синхронизирующий момент Мс = Mmaxsinq, где q — угол между осью ротора и вектором НС.
При отсутствии тормозного момента ротор займет положение, при котором его ось совпадет с осью фазы А (рис. 3.2, первый такт). Если теперь отключить фазу А и включить фазу В, вектор НС и ротор повернуться на 90 о (второй такт на рис. 3.2). При включении фазы А на напряжение обратной полярности (третий такт на рис. 3.2) НС и ротор повернутся еще на 90 о и т.д.
Если к ротору ШД приложен момент нагрузки, то при переключении фаз ротор будет отставать от вектора НС на некоторый угол qн= arcsin(Mн/Mmax).
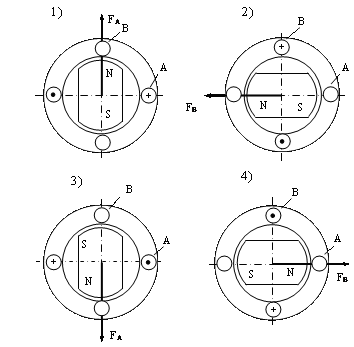
Рис. 3.2. Устойчивые положения ротора при включении фаз
Рассмотренный способ переключения обмоток можно представить в виде табл.1
| Полярность импульсов | Такты коммутации |
| +UA | |
| +UB | |
| -UA | |
| -UB |
Такой же шаг двигателя, но в  раз большое значение намагничивающей силы (и соответственно синхронизирующего момента) можно получить при одновременном переключении двух обмоток по алгоритму, показанному в табл.2
раз большое значение намагничивающей силы (и соответственно синхронизирующего момента) можно получить при одновременном переключении двух обмоток по алгоритму, показанному в табл.2
| Полярность импульсов | Такты коммутации | |
| +UA | X | X |
| +UB | X | X |
| -UA | X | X |
| -UB | X | X |
Шаг двигателя можно уменьшить в 2 раза, если обмотки переключать в соответствии с табл.3
| Полярность импульсов | Такты коммутации | ||
| +UA | X | X | X |
| +UB | X | X | X |
| -UA | X | X | X |
| -UB | X | X | X |
В зависимости от типа электронного коммутатора управление ШД может быть:
·одноплярным или разнополярным;
·симметричным или несимметричным;
·потенциальным или импульсным.
При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U.
Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное. Способы переключения обмоток, соответствующие тал. 1 и 2 будут симметричными, а по табл.3 – несимметричным.
При потенциальном управлении напряжение на обмотках изменяется только в моменты поступления управляющих импульсов. При отсутствии управляющего сигнала обмотка или группа обмоток находятся под напряжением, а положение ротора фиксируется полем обмоток. При импульсном управлении напряжение на обмотки подается только на время отработки шаг, после чего оно снимается и ротор удерживается в заданном положении либо реактивным моментом, либо внешним фиксирующим устройством.
В двухполюсной машине число устойчивых положений в пределах одного оборота ротора n следующее (m — число фаз):
1.при однополярной коммутации и симметричном управлении n = m;
2.при разнополярной коммутации с симметричным управлением n = 2m;
3.при несимметричной разнополярной коммутации n = 4m.
Очевидно, что несимметричная коммутация возможно только при m ³ 2.
В многополюсных ШД число устойчивых положений возрастает пропорционально числу пар полюсов р.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному управляющему импульсу (угол между двумя соседними устойчивыми состояниями)


Для рассмотренных двигателей р = 1, m = 2 (в первом двигателе одному такту соответствует действие возбужденных полюсов, а другому, при отключении обмотки, – действие полюсов с постоянными магнитами). Следовательно, при разнополярной симметричной коммутации шаг двигателейa = 90 o . При несимметричной разнополярной коммутации a = 45 o .
Если в двухфазном двигателе выполнить выводы средних точек, он фактически превращается в четырехфазный ШД (рис.3.3). В отличие от двигателей с обычной двухфазной обмоткой, питаемой разнополярными импульсами, данный двигатель можно питать однополярными импульсами, что значительно упрощает коммутатор, хотя и приводит к несколько худшему использованию материалов.
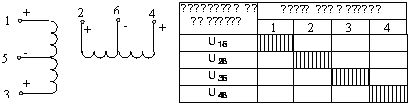
Рис.3.3. Схема обмоток и порядок коммутации 4-х фазного ШД
Магнитоэлектрические ШД удается выполнить с шагом до 15 о . Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов больше шести.
Гораздо более мелкий шаг (до долей градуса) можно получить в редукторных (индукторных) ШД. Индукторные ШД выполняются с числом фаз m = 2¸4. Они имеют зубчатый ротор с равномерно расположенными zp зубцами и гребенчатые зоны статора, смещенные относительно друг друга на угол 2p/(mzp) (например, рис.3.4). Число пазов статора и ротора, их геометрические размеры выбираются такими, чтобы обеспечить необходимую величину шага и синхронизирующего момента при заданном виде коммутации токов.
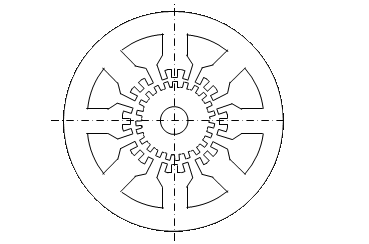
Рис. 3.4. Геометрия магнитной системы индукторного ШД
Основной особенностью индукторных двигателей является то, что магнитное поле в зазоре содержит постоянную и переменную составляющие. Постоянная составляющая поля возбуждается либо постоянной составляющей тока обмоток управления – у двигателей с самовозбуждением, либо специальной обмоткой возбуждения – у двигателей с независимым возбуждением, либо постоянными магнитами – у магнитоэлектрических двигателей. Переменная составляющая магнитного поля создается импульсами тока обмоток управления, поступающими от электронного коммутатора.
Шаговый Двигатель Схема Подключения
Формирование импульсов отводится микроконтроллерам например Arduino.

В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. 
Путь для повышения магнитного поля — это увеличение тока или числа витков обмоток.
Управление биполярным шаговым двигателем
Двигатели с 4 обмотками имеют преимущество в том, что вы можете подключить обмотки любым удобным для вас образом и получить как биполярный, так и униполярный двигатель. 
Например, двигатели с дисковым намагниченным ротором. Полушаговое управление интересно тем, что становится возможным более точное позиционирование вала двигателя, благодаря к тому, что к целым шагам добавляются еще и половинки это достигается совмещение предыдущих двух режимов работы, а обмотки чередуются, то включаясь попарно, то по одной. 
У его намагниченного центрального вала имеется два набора зубов для двух магнитных полюсов, которые затем выстраиваются в линию с зубами вдоль электромагнитов. Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки на Рисунке 10 они не показаны. 
Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. 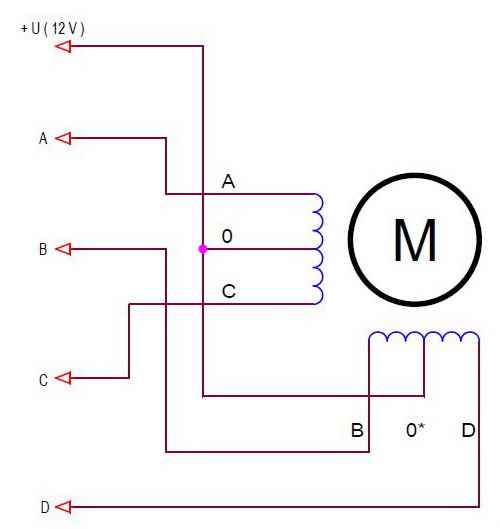
Зависимость момента от скорости, влияние нагрузки Момент, создаваемый шаговым двигателем, зависит от нескольких факторов: скорости. Причиной этого является фильтрующее действие инерции ротора и нагрузки. 
Управление шаговым двигателем
Сморите видео
Несмотря на то, что драйвер, обеспечивающий микрошаговый режим, намного сложнее обычного драйвера, всё равно система может оказаться более простой и дешевой, чем шаговый двигатель, плюс редуктор. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полная схема, приведенная в [ 10 ] и многократно повторенная на интернет-сайтах, пригодна для использования в качестве тестовой платы. С помощью подстроечного резистора видно на правом фото можно задавать выходной ток. 
Схема содержит описанный ранее двунаправленный двухфазовый формирователь на D-триггерах Рисунок 
Современные микроконтроллеры иногда имеют встроенные ЦАПы, которые можно использовать для реализации микрошагового режима взамен специальных контроллеров. 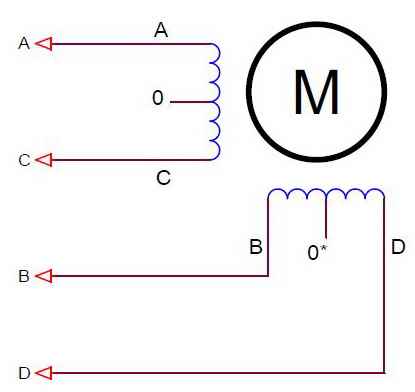
Увеличение или уменьшение питающего напряжения ни к чему не приведет, так как обороты задаются частотой сети. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал. 
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А. При этом используется номинальное число шагов. 
Синусоидальный ток фаз может быть обеспечен применением специальных драйверов. 
Это означает, что в таком режиме не может быть получен полный момент. Внутри находятся полюсные наконечники в виде ламелей.
Шаговый двигатель БЕЗ ДРАЙВЕРА!

Виды шаговых двигателей по типу ротора:
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Для устранения колебаний момента при работе двигателя в полушаговом режиме можно снижать ток в те моменты, когда включены две фазы. 
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А. 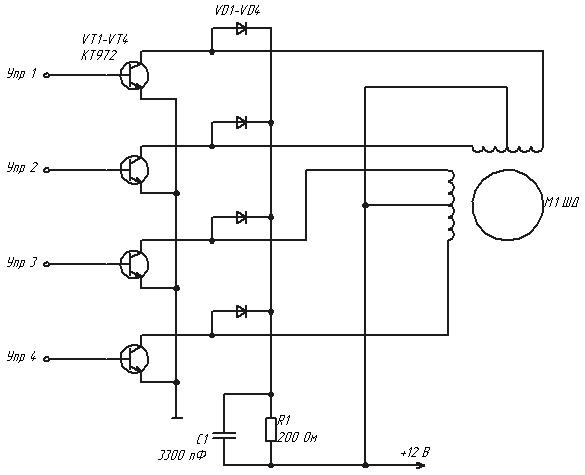
Упрощенная схема коммутатора шагового двигателя без реверса. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания. Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения особенно на очень низких скоростях , для устранения шума и явления резонанса. 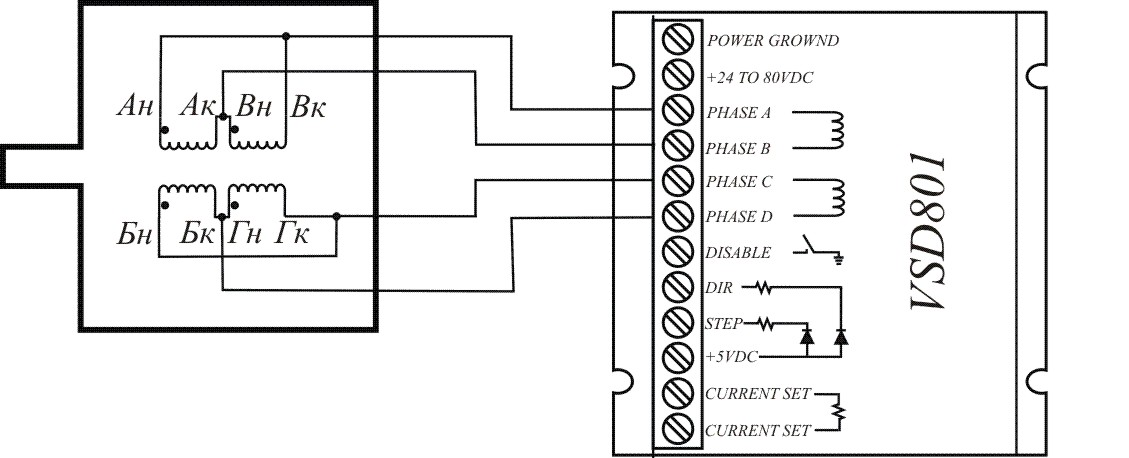
Зависимость момента от угла поворота ротора для двух запитанных обмоток. Обычно у них четыре вывода, две обмотки. 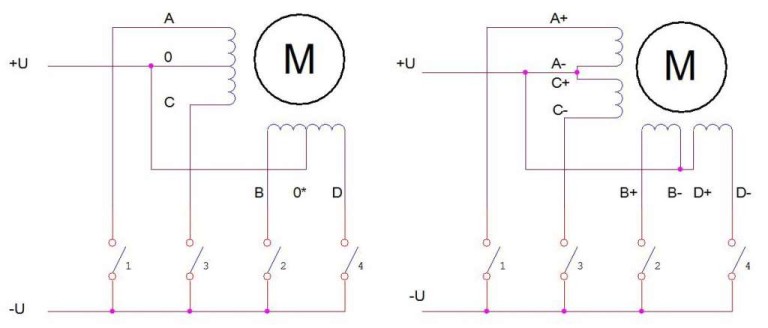
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов рис.

Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно.
Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы.
Обеспечивает паспортное значение электрических характеристик. Драйверы делятся на две категории: Повторяющие форму сигналов. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC ON MOSFET, но с учетом рекомендаций, описанных выше.
Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Технические характеристики A4988
Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Можно увеличить количество шагов в 16, 32, 64 раза и т.
Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП. Таким образом, выполняется один шаг.
Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки. Режим управления двигателем задается коммутатором. Шаговые двигатели.
Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток. Этот метод использует в два раза больше шагов, чем полный шаг, но он также имеет меньший крутящий момент.
А принцип работы этого всего очень прост: конденсатор формирует сдвиг фаз на одной из обмоток, в результате обмотки работают почти попеременно и шаговый двигатель крутится. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление — соответственно вдвое меньше. Так, пожалуй, можно дать строгое определение. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки.
Общие сведения:
Микрошаговый режим. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Диаграммы, диаграммы
В пределе, шаговый двигатель может работать как синхронный электродвигатель в режиме непрерывного вращения. Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах. Описание библиотеки для работы с шаговым двигателем В среде разработки Ардуино IDE существует стандартная библиотека Strepper. Гибридный двигатель.
Обзор копеечной платы управления шаговым двигателем.







