- 2 Схемы
- Регулятор оборотов электродвигателя 220В
- Технические параметры регулятора
- Принципиальная электросхема
- Увеличение мощности регулятора
- Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока
- Регулятор оборотов электродвигателя: назначение, принцип работы
- Назначение
- Принцип работы
- Как выбрать?
- Подключение
2 Схемы
Принципиальные электросхемы, подключение устройств и распиновка разъёмов

Регулятор оборотов электродвигателя 220В

Качественный и надёжный контроллер скорости вращения для однофазных коллекторных электродвигателей можно сделать на распространённых деталях буквально за 1 вечер. Эта схема имеет встроенный модуль обнаружения перегрузки, обеспечивает мягкий пуск управляемого двигателя и стабилизатор скорости вращения мотора. Работает такой блок с напряжением как 220, так и 110 вольт.
Технические параметры регулятора
- напряжение питания: 230 вольт переменного тока
- диапазон регулирования: 5…99%
- напряжение нагрузки: 230 В / 12 А (2,5 кВт с радиатором)
- максимальная мощность без радиатора 300 Вт
- низкий уровень шума
- стабилизация оборотов
- мягкий старт
- размеры платы: 50×60 мм
Принципиальная электросхема
Схема модуля системы регулирования основана на генераторе ШИМ импульсов и симисторе управления мотором — классическая схемотехника для подобных устройств. Элементы D1 и R1 обеспечивают ограничение величины напряжения питания до значения безопасной для питания микросхемы генератора. Конденсатор C1 отвечает за фильтрацию напряжения питания. Элементы R3, R5 и P1 являются делителем напряжения с возможностью его регулирования, который используется для задания величины мощности, подаваемой в нагрузку. Благодаря применению резистора R2, непосредственно входящего в цепь поступления на м/с фазы, внутренние блоки синхронизированы с симистором ВТ139.
На следующем рисунке показано расположение элементов на печатной плате. Во время монтажа и запуска следует обратить внимание на обеспечение условий безопасной работы — регулятор имеет питание от сети 220В и его элементы непосредственно подключены к фазе.
Увеличение мощности регулятора
В испытательном варианте был применен симистор BT138/800 с максимальным током 12 А, что дает возможность управления нагрузкой более 2 кВт. Если необходимо управление ещё большими токами нагрузки — советуем тиристор установить за пределами платы на большом радиаторе. Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.

Кроме управления оборотами электромоторов, можно без каких-либо переделок использовать схему для регулировки яркости ламп.
Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока
Большинство мировых производителей профессиональных угловых шлифовальных машинок (болгарок) таких как Bosch, Metabo, Makita, DeWalt и других используют два типа регуляторов оборотов с обратной связью.
С помощью таходатчика
На конце якоря мотора установлен кольцевой магнит с прорезью или срезом, а на плате регулятора установлена катушка индуктивности или датчик Холла. Такой регулятор обеспечивает максимально точную стабилизацию оборотов двигателя при изменении нагрузки.
На основе измерения падения напряжения на электродвигателе
В этом случае измеряется падение напряжения на двигателе, и схема управления изменяет длительность открытия силового ключа. Такой регулятор, если он правильно настроен, обеспечивает также хорошую стабилизацию оборотов двигателя при изменении нагрузки.
Все промышленные регуляторы, собранные на микроконтроллерах, полностью залитые эпоксидной смолой и в итоге они не пригодны для ремонта, а цена за новый регулятор достаточно большая, и составляет примерно 20-30% от стоимости самого электроинструмента.
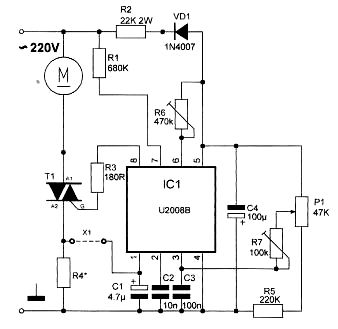
В поиске специализированных микросхем для решения данной задачи мне приглянулись регуляторы Phase Control фирмы Atmel. Например, простой вариант регулятора на микросхеме U2008B. Рассмотрим схему регулятора на ИМС U2008B приведенную на рис.1. В данном регуляторе можно использовать обратную связь по току или режим плавного пуска, однако в нём нет защиты от перегрузки. Если использовать плавный пуск тогда нужны только элементы С1, R4 и перемычку Х1 не ставим, а если нужна обратную связь — тогда все наоборот.
Так как ИMC U2008B не может одновременно работать в режиме плавного пуска и обратной связи, она не подходит для нашей задачи. На рис.2 показана схема регулятора на микросхеме U2010B, у которой есть обратная связь по току, защита от перегрузки и плавный старт одновременно. Светодиод D2 индицирует перегрузку электродвигателя. Переключатель SA1 «Mode» обеспечивает возможность выбора действий при перегрузке на двигателе в трех режимах: Положение А — индикация перегрузки и последующий сброс на минимальные обороты. Для восстановления рабочих оборотов, необходимо выключить инструмент.
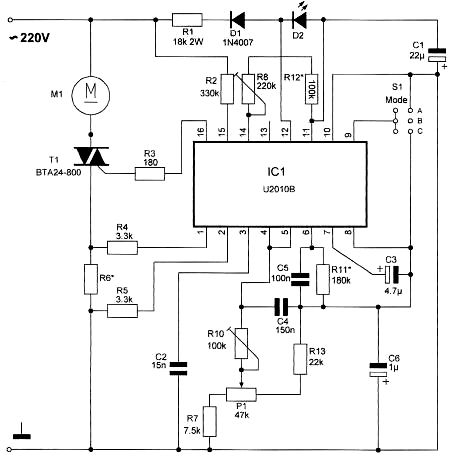
Положение В — индикация перегрузки, последующий сброс на минимальные обороты, после снятие нагрузки с инструмента, восстанавливаются установленные обороты, т.е. происходит авто старт.
Положение С — только индикация перегрузки, без остановки двигателя и защиты.
Подбором ёмкости конденсатора СЗ от 1 до 10 мкФ можно изменять длительность и плавность пуска двигателя.
Настройка регулятора.
В техническом описании к ИМС U2010B в схеме подключения обозначено только падение напряжение на R6 в 250 мВ и не указано, каким именно должен быть этот резистор.
Рассчитать сопротивление R6 можно исходя из мощности двигателя по формуле:
где:
UR6 — напряжение на R6 (250 мВ),
Рдвиг — мощность двигателя,
UПИТ — напряжение питания сети.
Например, для двигателя мощностью 750 Вт рассчитываем: R6= 0,25/(750/220) = 0,07 Ом.
Номиналы резисторов R6 и R11, в зависимости от мощности электродвигателя, приведены в таблице.
| R11 Мощность, Вт | R6*, Ом | Нихром, D 1 мм | Нихром, D 0,8 мм | R11*, кОм |
| 250 | 0,22 | 30 | 19 | 180-270 |
| 300 | 0,18 | 27 | 17 | 180-220 |
| 550 | 0,1 | 25 | 16 | 180 |
| 700 | 0,08 | 20 | 14 | 160 |
| 850 | 0,07 | 17 | 11 | 150 |
| 1000 | 0,055 | 15 | 10 | 100-120 |
| 1200 | 0,047 | 13 | 9 | 90-110 |
| 1500 | 0,04 | 12 | 8 | 80-100 |
| 1800 | 0,03 | 10 | 7 | 70-100 |
| 2000 | 0,028 | 8 | 6 | 65-90 |
| 2200 | 0,025 | 7 | 5 | 65-90 |
Главное правильно подбирать резистор R6 под мощность двигателя. Выше представленная формула правильная, но на практике может потребоваться некоторая коррекция по поведению двигателя под нагрузкой. Если резистор великоват, то двигатель довольно резко стартует (т.е. происходит большая компенсация нагрузки, чем надо), а потом отключается, а если резистор будет мал, то не будет обеспечиваться компенсация нагрузки.
В Datasheet к ИМС U2010B ёмкость конденсатора С2 указана 0,01 мкФ, но она рассчитана на 60-герцовую сеть, и при использования ИМС в сети 50 Гц за период выдавалось несколько импульсов управления. В итоге, обороты электродвигателя практически не регулировались и двигатель работал на полную мощность. Для сети с частотой 50 Гц нужно ёмкость конденсатора С2 увеличить до 0,015 мкФ.
Первый пуск
Переменный резистор Р1 (регулятор оборотов) нужно установить на минимальные обороты двигателя, по схеме движок потенциометра должен быть повернут в сторону резистора R13. Затем подстроенный резистор R10 (компенсация нагрузки) установить в среднее положение, а на место R11 (перегрузка) временно подпаять постоянный резистор сопротивлением 62 кОм. Потом включить регулятор в сеть 220 В / 50 Гц и подстроенным резистором R8 выставить самые минимальные обороты двигателя.
Нужно сделать так, чтобы при включении двигатель начинал вращаться на минимальных оборотах. Если настроить устройство так, чтобы совсем не было напряжения на электродвигателе, то тогда становится слишком нелинейная зависимость управления резистором Р1 — при его повороте сначала двигатель не крутится, а потом резко стартует без плавного пуска.
Далее нужно подключить вольтметр с диапазоном измерения 300 В к выводам двигателя, включить двигатель и на средних оборотах, зажимая вал или привод двигателя через тряпку рукой, выставить такое положение резистора R10, чтобы обороты электродвигателя не менялись при изменении нагрузки на его валу. Одновременно с этим нужно смотреть на вольтметр, подключенный к двигателю. При увеличении нагрузки на валу электродвигателя регулятор прибавляет напряжение, и двигатель крутится с одинаковыми оборотами, независимо от нагрузки.
И вот в последнюю очередь настраивается резистор R11 (перегрузка). Постоянный резистор номиналом 62 кОм выпаиваем и вместо него ставим подстроенный или переменный резистор номиналом 220 кОм. На оборотах двигателя чуть больше минимальных, сильно зажимая вал или привод двигателя, стараемся почти заклинить вал двигателя, и по степенно изменяем величину резистора R11, пока не начнет срабатывать защита, и не станет светиться VD2. Затем измерьте сопротивление переменного резистора тестером и запаяйте в устройство соответствующий резистор. В таблице указано приблизительные значения сопротивления R11,
Детали регулятора
Купить микросхемы U2008B, U2010B можно через сайт AliExpress (www.ru.aliexpress.com) в Китае с бесплатной доставкой на Украину, а далее посылка бесплатно отправляется через «Укрпочту» в любое почтовое отделение на территории Украины. Доставка на Украину производится на протяжении 25-40 дней. Например, цена 1 шт. микросхемы U2010B зависит от корпуса исполнения, примерно 0,9 USD в корпусе S016 и 1,2 USD в корпусе DIP16, а симистора ВТА24-800 — 0,4 USD.
Печатная плата устройства изготовлена из одностороннего фольгированного стеклотекстолита толщиной 1 мм.
Симистор VS1 лучше использовать с изолированной площадкой под радиатор серии ВТА, например BTA12-800, BTA16-800, BTA24-800, или применить другие. При мощности двигателя до 400 Вт, VS1 можно не устанавливать на радиатор. Все SMD детали типоразмера 1206, их можно запаять обычным паяльником с тонким жалом.
Подстроенные резисторы — типа СП3-19а или другой малогабаритный. Переменный резистор Р1 любой на 47-50 кОм, можно малогабаритные СП4-1, СП3-9. Резистор R1 мощностью не менее 2 Вт, например, типа MЛT-2 или др. Резистор R6 изготовлен из нихромовой проволоки диаметром 0,7 — 1 мм. Автор использовал нихромовый провод из старого блока сопротивлений для зажигания автомобилей ГАЗ с маркировкой 1402.3729. Все электролитические конденсаторы на напряжение не менее 50 В. Диод D1 — типа 1N4007 или КД208, также можно использовать диод в SMD исполнении. Светодиод D2 любой малогабаритний диаметром 3-5 мм красного света. Переключатель SA1 любой малогабаритный 3-х позиционный. Если нужен только один режим перегрузки, тогда вместо него можно установить перемычку.
Литература:
- Бирюков С. Автомат плавного пуска коллекторных электродвигателей. // Радио. — 1997. — №7. — С.40-42.
Печатная плата для схемы показанной на рисунке 2:
Автор: Валентин Шипляк, г. Ужгород
Регулятор оборотов электродвигателя: назначение, принцип работы
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
 Рис. 1. Схема тиристорного регулятора
Рис. 1. Схема тиристорного регулятора
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
 Регулировка оборотов на транзисторах
Регулировка оборотов на транзисторах
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
 Пример частотного регулирования
Пример частотного регулирования
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
 Регулировка оборотов переключением пар полюсов
Регулировка оборотов переключением пар полюсов
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
 Схема подключения регулятора
Схема подключения регулятора
Далее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
 Распиновка регулятора
Распиновка регулятора
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
 Проверьте цветовую маркировку
Проверьте цветовую маркировку
Если все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.







