Автоматизированное управление электроприводом. Понятие разомкнутых и замкнутых систем электропривода.
http://www.studfiles.ru/preview/4258105/
Автоматизированный эл.привод – это эл.механическая система состоящая из эл. двигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочих машин и целенаправленного управления этими процессами.
Структурная схема приведена на рисунк
ЭМП — электродвигательное устройство.
ЗУ – задающее уст-во.
УУ – управляющее уст-во.
ПУ – передаточное уст-во.
РМ – рабочий мех-м.
Разомкнутые схемы управления электропривода
К разомкнутым относятся схемы в которых для управления ЭП не используются обратные связи по его координатам или технологическим параметрам приводимых в движение рабочей машины или производственного механизма. Эти схемы, отличаясь простотой своей реализации, широко используются там, где не требуется высокое качество управления движением ЭП, в частности для пуска, реверса и торможения двигателей.
Разомкнутые схемы, осуществляя управление ЭП, обеспечивают и защиту ЭП, питающей сети и технологического оборудования при возникновении различных ненормальных режимов —коротких замыканий, перегрузке двигателей исчезновении питающего напряжения или обрыве фазы питающей сети и т.д. Для этого они содержат соответствующие аппараты и устройства, находящиеся во взаимодействии с устройствами управления двигателями. В разомкнутых схемах управления главным образом используется релейно-контакторная аппаратура, в состав которой входят командные маломощные аппараты, силовые коммутационные аппараты с ручным и дистанционным управлением, реле управления и зашиты.
Замкнутые схемы управления ЭП
Замкнутые структуры ЭП применяются в тех случаях, когда требуется обеспечить движение исполнительных органов рабочих машин с высокими показателями — большими диапазоном регулирования скорости и точностью ее поддержания, заданным качеством переходных процессов и точностью остановки, а так высокой экономичностью или оптимальным функционированием технологического оборудования и самого ЭП. Основным признаком замкнутых структур является такое автоматическое управление ЭП, при котором ЭП наилучшим образом выполняет свои функции при всевозможных управляющих и внешних возмущениях, действующих на рабочую машину или ЭП.
Замкнутые структуры ЭП строятся по принципам компенсации возмущения и отклонения, называемому также принципом обратной связи. Рассмотрим принцип компенсации наиболее характерного внешнего возмущения ЭП, момента нагрузки при регулировании скорости w. Основным признаком замкнутой структуры ЭП является наличие цепи, по которой на вход ЭП (рис. 11.1,я) вместе с задающим сигналом скорости подается сигнал пропорциональный моменту нагрузки , В результате этого управление ЭП осуществляется суммарным сигналом , который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою эффективность, ЭП по схеме рис. 11.1, а выполняются редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).
В связи с таким положением подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом, откуда и пошло название замкнутых схем. Применительно к рассматриваемому примеру регулирования скорости признаком этой структуры является цепь, обратной связи (рис. 11,1,б), по которой информация о текущем значении скорости подается на вход ЭП, где он вычитается из сигнала задания скорости . Управление ЭП осуществляется сигналом отклонения . Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления ЭП эти отклонения. Тем самым управление движением осуществляется с учетом его результата.
Способы пуска АД. Реверс АД
Трехфазный асинхронный двигатель (АД) является основной электрической машиной, применяемой на производстве в настоящее время. В первую очередь, это связано с его низкой ценой, надежностью и простотой.
Существует несколько способов запуска АД.
Первый способ – прямой пуск. Пуск двигателя осуществляется напрямую, подачей питания на обмотку статора. Этот способ наиболее экономичный, так как не требует дополнительных устройств для запуска. Но, чаще всего такой способ применяется для маломощных двигателей, так как пусковые моменты и токи при таком способе достигают больших значений и способны повредить не только сам двигатель, но и механические привода соединенные с ним.
Другой способ — это способ пуска с добавочным сопротивлением в цепи статора, так называемый реостатный способ. В начальный момент времени в цепи статора находятся реостаты, при подаче напряжения питания, часть напряжения падает на них. Поэтому двигатель запускается на пониженном напряжении, следовательно, пусковые токи и момент уменьшаются до умеренных значений. Недостатком такого способа является низкий пусковой момент, в связи с чем не рекомендуется использовать этот способ при пуске под нагрузкой.
Способ пуска асинхронного двигателя переключением со звезды на треугольник, применяется в установках, где нагрузка на валу минимальна или вообще отсутствует. Для того чтобы осуществить данный вид пуска, нужно чтобы основной схемой включения двигателя был треугольник. В начальный момент времени обмотка соединяется по схеме звезда, запускается, происходит разгон до некоторого значения, а затем переключают на треугольник. Таким образом, добиваются уменьшения токов в момент пуска. Но, с уменьшением токов, уменьшаются и моменты, именно поэтому не рекомендуется использовать этот способ для двигателя с нагрузкой на валу.
Еще одним способом пуска является плавный пуск асинхронного двигателя. В этом случае к статорной обмотке подключают устройство плавного пуска (УПП), или софт-стартер. С помощью устройства плавного пуска, можно запускать и останавливать двигатель без рывков. Кроме того, в зависимости от комплектации УПП в нем могут присутствовать функции регулировки и защиты. Разумеется, такой способ пуска является наиболее лучшим для самой машины и производственных механизмов, потому что он продлевает срок службы. Но и стоимость такого устройства колеблется в широких пределах и зачастую может превышать стоимость самого двигателя.
Реверсом называют изменение направления вращения электрической машины.
Направление вращения асинхронного двигателя зависит от порядка следования фаз питающего напряжения.
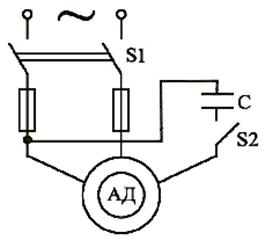
Рис.6.18. Схема пуска трёхфазного асинхронного двигателя от однофазной сети
На рис.6.19 изображены векторные диаграммы прямого и обратного следования фаз статорных обмоток, соединенных звездой, а также указаны направления вращения электрической машины.
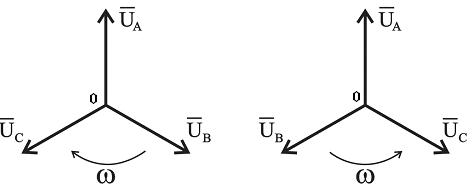
Рис.6.19. Векторные диаграммы прямого и обратного следования фаз
питающего напряжения, поясняющие реверс асинхронного двигателя
Существует несколько способов управления пуском, реверсом и остановкой асинхронных двигателей.
На рис.6.20 изображены схемы управления асинхронным двигателем с помощью переключателя S и магнитного пускателя МП. Реверс и остановка двигателя при управлении магнитным пускателем осуществляется кнопками “Вперед”, ”Назад” и ”Стоп”, управляющими контакторами В и Н, которые имеют силовые контакты и контакты цепи управления, осуществляющих блокировку одновременного включения контакторов.
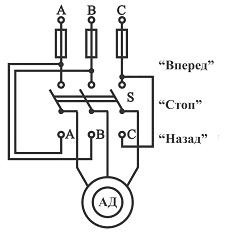
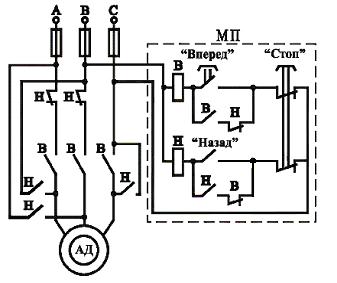
Рис.6.20. Схемы управления асинхронным двигателем с помощью переключателя и магнитного пускателя
Асинхронные двигатели большой мощности останавливают электроторможением методами противовоключения и рекуперации. При торможении противовключением производится переключение двух фаз статора, изменяется направление вращения магнитного поля статора, скольжение становится больше единицы, и ротор двигателя останавливается. Рекуперативное торможение производится при переводе двигателя в генераторный режим. При этом частота вращения ротора становится больше частоты вращающегося поля статора, скольжение становится меньше нуля, происходит торможение и остановка машины.
Дата добавления: 2018-02-15 ; просмотров: 1999 ; Мы поможем в написании вашей работы!
Тема 10. Разомкнутые схемы управления электропривода
Занятие 20(2 часа) Электрические аппараты ручного и дистанционного управления
Общее описание разомкнутых схем управления электроприводом.
К разомкнутым относятся электрические схемы, в которых для управления ЭП не используются обратные связи по его координатам или технологическим параметрам приводимых в движение рабочей машины или производственного механизма. Эти схемы, отличаясь простотой своей реализации, широко применяются там, где не требуется высокое качество управления движением ЭП, например, для пуска, реверса и торможения двигателей.
Разомкнутые схемы, осуществляя управление ЭП, обеспечивают и защиту самого ЭП, питающей сети и технологического оборудования при возникновении различных ненормальных режимов работы — коротких замыканий, перегрузок двигателей, исчезновения питающего напряжения или обрыва фазы питающей сети и др. Для такой защиты применяются соответствующие аппараты и устройства, находящиеся во взаимодействии с устройствами управления двигателями.
В разомкнутых схемах управления главным образом используется релейно-контакторная аппаратура, в состав которой входят командные маломощные аппараты, силовые коммутационные аппараты с ручным и дистанционным управлением, а также реле управления и защиты.
Электрические аппараты ручного управления.
К аппаратам ручного управления относятся:
- командные маломощные устройства — кнопки и ключи управления,
- командоаппараты и силовые коммутационные аппараты (рубильники, пакетные выключатели и силовые контроллеры).
Кнопки управленияпредназначены для подачи оператором управляющего воздействия на ЭП.
- по размерам нормальные и малогабаритные,
- по числу замыкающих и размыкающих контактов,
- по форме толкателя.
Две, три или более кнопок, смонтированных в одном корпусе, образуют кнопочную станцию.
Выпускаются кнопки серий КУ 120 и КЕ, предназначенные для работы в цепях переменного тока с напряжением до 500 В и постоянного тока с напряжением до 220 В и токами до 4 А.

Рис. 20.1.Обозначение контактов кнопок

Рис.20.2. Кнопки управления и кнопочные станции
Ключи управления (универсальные переключатели)предназначены для подачи управляющего воздействия на ЭП и имеют два или более фиксированных положений рукоятки и несколько замыкающих и размыкающих контактов . В среднем положении рукоятки (позиция 0) замкнут контакт SM1, что обозначается точкой на схеме, а контакты SM2 и SM3 разомкнуты. В положении 1 рукоятки замыкается контакт SM2 и размыкается SML Число контактов ключей и диаграмма их работы могут быть самыми различными.
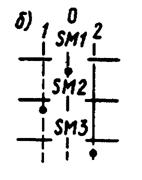
Рис. 20.3. Обозначение контактов ключа управления
Ключи управления серии ПЕ рассчитаны на те же напряжения и токи, что и кнопки управления КЕ. Универсальные переключатели серий УП 5300, УП 5400 и ПКУ 3 используются для коммутации цепей катушек контакторов, масляных выключателей, управления многоскоростными АД и в ряде других случаев. Они могут коммутировать до 32 цепей и иметь до восьми положений (позиций) рукоятки управления.


Рис. 20.4. Ключи и переключатели
Командоконтроллеры (командоаппараты)служат для коммутаций нескольких маломощных (ток нагрузки до 16 А) электрических цепей. Эти аппараты, имеющие ручное управление от рукоятки или педали с несколькими положениями, находят широкое применение в схемах управления ЭП крановых механизмов, металлургического оборудования, на транспорте.
- по числу коммутируемых цепей,
- по виду привода контактной системы,
- по числу рабочих положений рукоятки (педали),
- по диаграммам включения и выключения контактов.
Их электрическая схема изображается аналогично схеме ключей управления и переключателей
Командоаппараты общепромышленного назначения серий серий КА 410 А, КА 420 А, КА 4000, КА 4100, КА 4200, КА 4500, КА 4600, КА 11 предназначены для коммутации цепей постоянного тока напряжением до 440 В и переменного тока напряжением до 500 В. Командоконтроллеры серий ККП 1000 и ККП 423 используются для управления ЭП
крановых механизмов и металлургического оборудования.


Рис. 20.5. Командноконтроллеры
Рубильники— это простейшие силовые коммутационные аппараты, которые в основном предназначены для неавтоматического нечастого замыкания и размыкания силовых электрических цепей двигателей постоянного и переменного тока напряжением до 500 В и током до 5000 А.
- по силе коммутируемого тока,
- по числу полюсов (коммутируемых цепей),
- по виду привода рукоятки
- по числу положений рукоятки (два или три).
Рубильники серий Р и РА рассчитаны на токи 100. 600 А, напряжения 220. 660 В и имеют 1 . 3 полюса.
Пакетные выключатели— это разновидность рубильников. Их контактная система набирается из отдельных пакетов по числу полюсов (коммутируемых цепей). Пакет состоит из изолятора, в пазах которого находятся неподвижный контакт с винтовыми зажимами для подключения проводов и пружинный подвижный контакт с устройством искрогашения.
Выпускаемые пакетные выключатели серий ПВМ, ППМ, ПУ, УП, ОКП, ПВП 11 предназначены для коммутации электрических цепей постоянного тока до 400 А напряжением до 220 В и переменного тока до 250 А напряжением до 380 В.
Контроллеры— это многопозиционные электрические аппараты с ручным или ножным приводом для непосредственной коммутации силовых цепей двигателей постоянного и переменного тока. В ЭП используются контроллеры двух видов — кулачковые и магнитные.
В кулачковых контроллерахразмыкание и замыкание контактов обеспечивается смонтированными на барабане кулачками, поворот которых осуществляется с помощью рукоятки, маховичка или педали. За счет профилирования кулачков обеспечивается необходимая последовательность коммутации контактных элементов.
В крановых ЭП используются кулачковые контроллеры серии ККТ-60А для управления асинхронными двигателями, рассчитанными на напряжение до 380 В, и серии KB 100 для управления двигателями постоянного тока напряжением до 440 В. Такие контроллеры имеют до 12 силовых контактов, рассчитанных на номинальные токи до 63 А, а также маломощные контакты для коммутации цепей управления. Число позиций их рукояток (маховиков) может достигать шести в каждую сторону от среднего (нулевого) положения.
Магнитные контроллерыпредставляют собой коммутационные устройства, в состав которых входят командоконтроллер и силовые электромагнитные аппараты — контакторы. Командоконтроллер с помощью своих контактов управляет катушками контакторов, которые в свою очередь осуществляют коммутацию силовых цепей двигателей. Применение такого контроллера вместо кулачкового позволяет повысить степень автоматизации ЭП, а следовательно, и производительность рабочей машины или механизма, и улучшить условия труда оператора, так как управление ЭП с помощью командоконтроллера или кнопочной станции не потребует от него приложения больших усилий. Магнитные контроллеры нашли основное применение в ЭП крановых механизмов, работа которых характеризуется частым включением двигателей. В ЭП крановых механизмов для металлургического производства применяются магнитные контроллеры серий К, рассчитанные на номинальные токи контакторов до 250 А, и КС, рассчитанные на токи до 400 А, а в кранах общего назначения -контроллеры серий ТА (токи до 160 А) и ТСА (токи до 250 А).
Главная цепь контроллеров рассчитывается на переменный ток напряжением 220 и 380 В, а цепи управления — на постоянный ток напряжением 220 В (серии К и КС) и на переменный ток с напряжением силовой цепи (серии ТА и ТСА).
Дата добавления: 2018-05-12 ; просмотров: 670 ; Мы поможем в написании вашей работы!







