Устройство и принцип работы простейшего электродвигателя
Электродвигатель – это просто устройство для эффективного преобразования электрической энергии в механическую.
В основе этого преобразования лежит магнетизм. В электродвигателях используются постоянные магниты и электромагниты, кроме того, используются магнитные свойства различных материалов, чтобы создавать эти удивительные устройства.
Существует несколько типов электродвигателей. Отметим два главных класса: AC и DC.
Электродвигатели класса AC (Alternating Current) требуют для работы источник переменного тока или напряжения (такой источник Вы можете найти в любой электрической розетке в доме).
Электродвигатели класса DC (Direct Current) требуют для работы источник постоянного тока или напряжения (такой источник Вы можете найти в любой батарейке).
Универсальные двигатели могут работать от источника любого типа.
Не только конструкция двигателей различна, различны способы контроля скорости и вращающего момента, хотя принцип преобразования энергии одинаков для всех типов.
Электродвигатели используются повсюду. Даже дома вы можете обнаружить огромное количество электродвигателей. Электродвигатели используются в часах, в вентиляторе микроволновой печи, в стиральной машине, в компьютерных вентиляторах, в кондиционере, в соковыжималке и т. д. и т. п. Ну а электродвигатели, применяемые в промышленности, можно перечислять бесконечно. Диапазон физических размеров – от размера со спичечную головку до размера локомотивного двигателя.
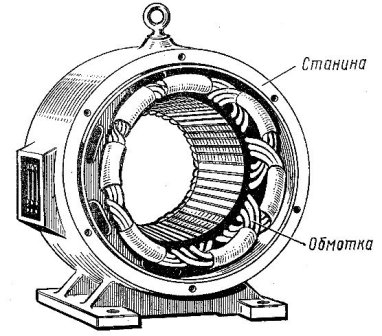
Показанный ниже промышленный электродвигатель работает и на постоянном, и на переменном токе. Его статор – это электромагнит, создающий магнитное поле. Обмотки двигателя поочередно подключаются через щетки к источнику питания. Одна за другой они поворачивают ротор на небольшой угол, и ротор непрерывно вращается.
Принципы работы электрического двигателя для начинающих
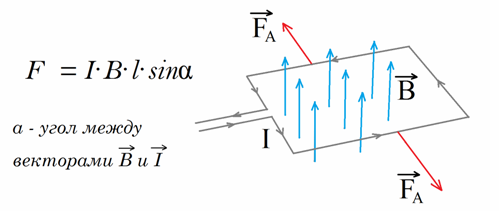
Основа работы электрического двигателя, как постоянного тока, так и переменного тока зиждется в силе Ампера. Ежели не впетрить как она получается, то ничего и непонятно будет никогда.
П.С. На самом-то деле там векторное произведение и дифференциалы, но это детали, а у нас упрощённый, частный случай.
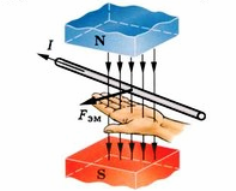
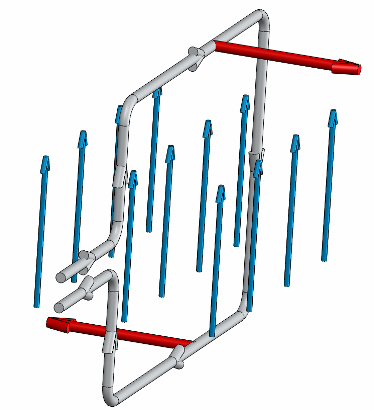
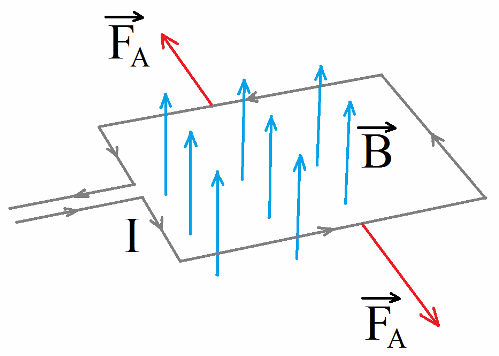
Направление силы ампера определяется правилом левой руки.
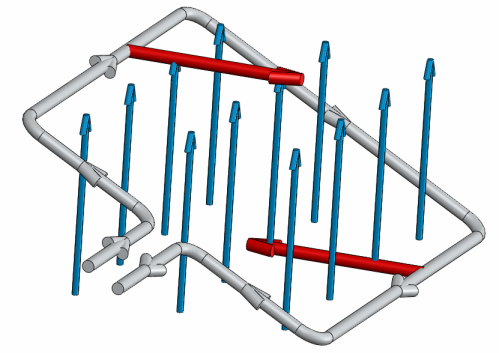
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
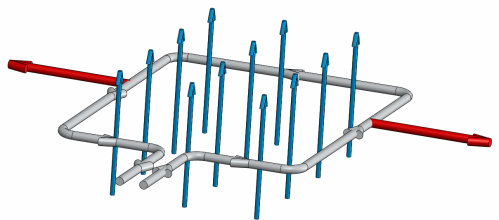
А если рамка с током повернута по-другому, то вот что будет:
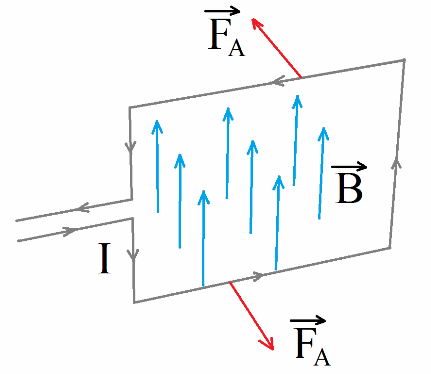
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
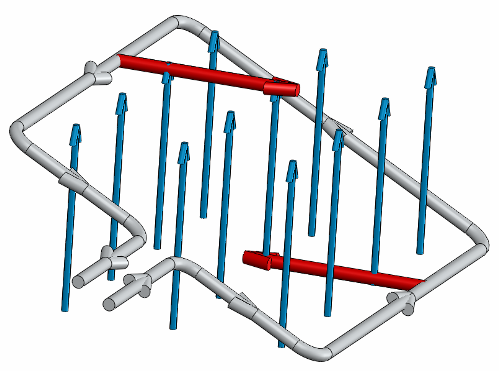
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и электрического тока.
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
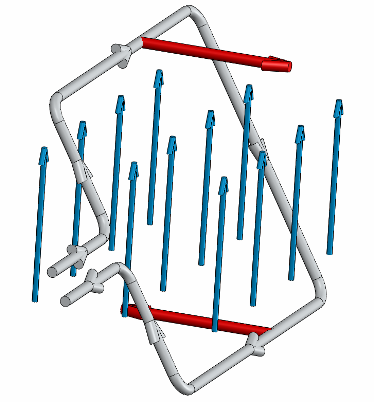
Рис.4.1 Случайно расположенная рамка
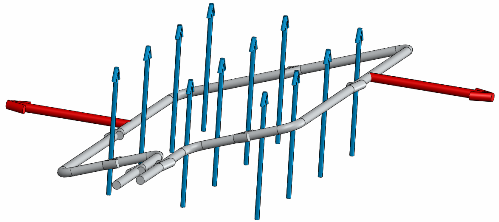
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, на сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
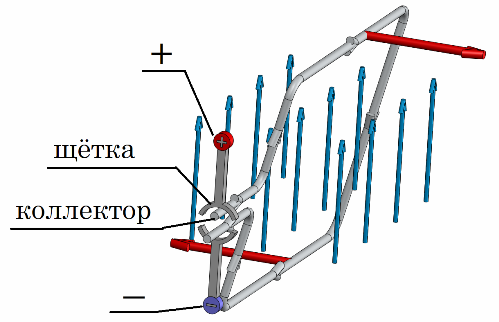
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
ПостСкриптум. Кроме стандартного двигателя постоянного тока (стандартного это значит с щёточно-коллекторным узлом) есть ещё его развитие: бесколлекторный двигатель постоянного тока (БДПТ) и вентильный двигатель.
БДПТ отличается тем, что ток там меняется электронным способом (закрываются и открываются транзисторы), а вентильный ещё круче, он ещё и ток меняет, управляя моментом. И вообще БПДТ с вентильным по сложности сравнимы с электроприводом, ибо имеют всякие датчики положения ротора (датчики Холла например) и сложный электронный контроллер.
Отличие БДПТ от вентильного двигателя в форме противо-ЭДС. У БДПТ там трапеция (грубое изменение), а у вентильного двигателя – синусоида, более плавное значит.
По-английски БДПТ это BLDC, а вентильный двигатель это PMSM.
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
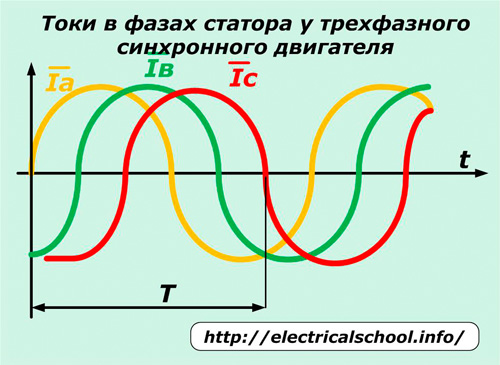
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
А есть значит 3 фазы переменного тока.
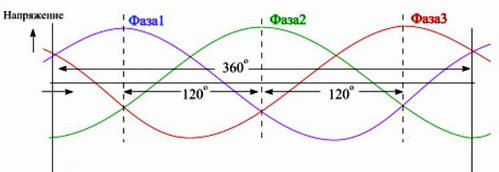
Между ними как видно 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
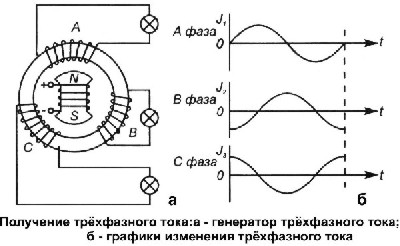
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
Далее вращающееся магнитное поле «давит» силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Принцип действия и устройство электродвигателя
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.

Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
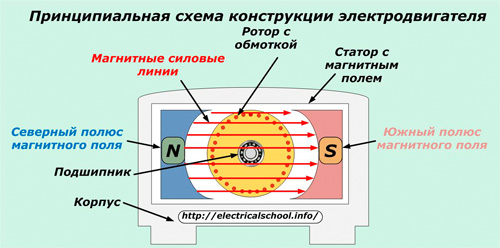
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.
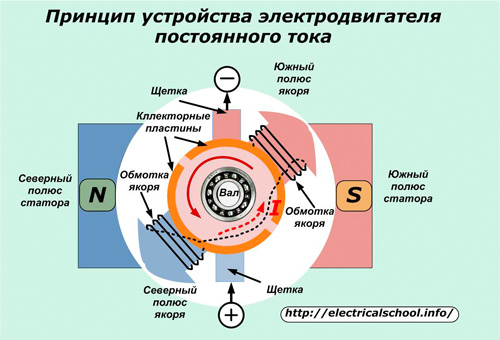
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
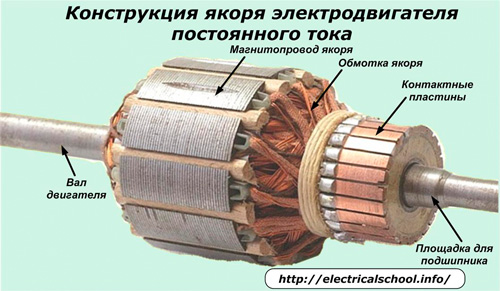
обмотка секционирована не на две, а на большее количество частей;
каждая секция обмотки смонтирована на своем полюсе;
коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.
У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону, периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).

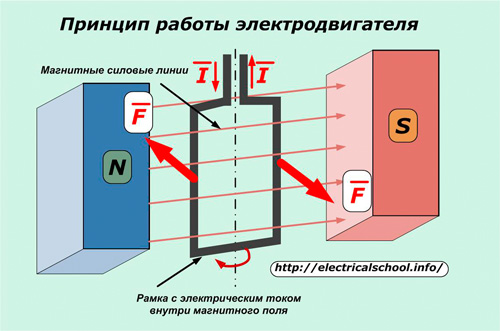
На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.
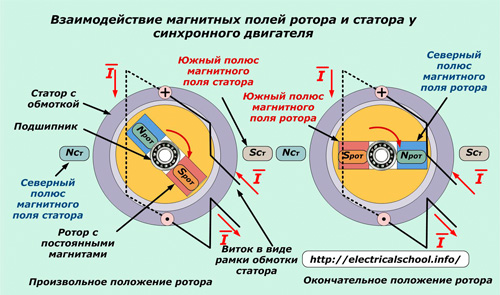
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
В обоймах подшипника свободно вращается ротор с вмонтированным постоянным магнитом, у которого ярко выражены северный «N рот» и южный «S рот» полюса. При протекании положительной полуволны тока по обмотке статора в ней создается магнитное поле с полюсами «S ст» и «N ст».
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
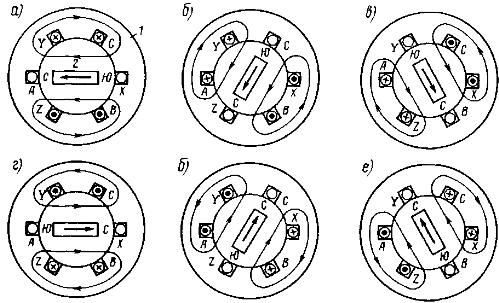
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.
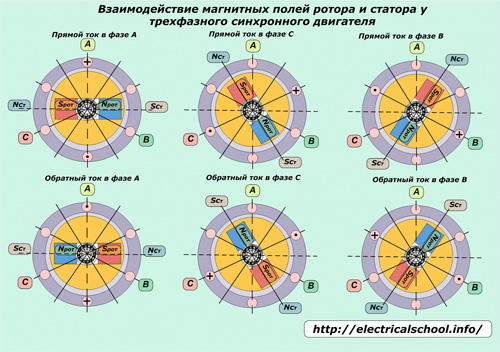
В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
На картинке для каждого случая ток проходит только по одной обмотке в прямом или обратном направлении, которое показано значками «+» и «-».
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе . Только в каждую обмотку с помощью управления специальным контроллером (драйвером шагового двигателя) подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.
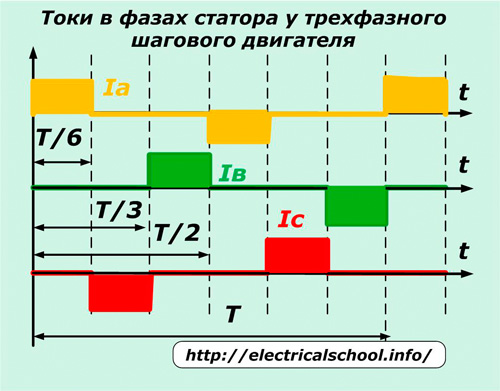
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
В обеих описанных трехфазных системах возможно изменение направления вращения якоря. Для этого надо просто поменять чередование фаз «А»-«В»-«С» на другое, например, «А»-«С»-«В».
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
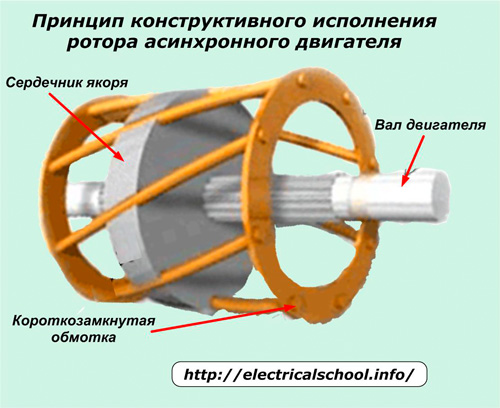
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.

Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.
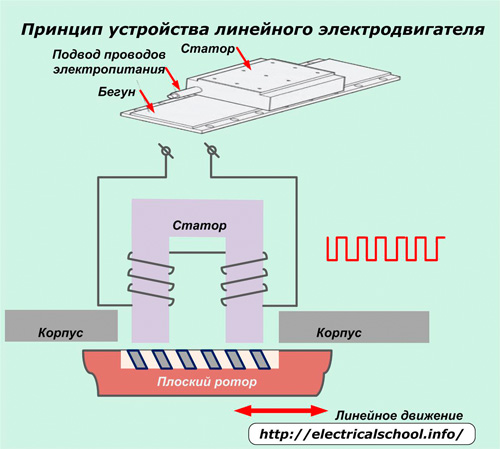
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.







