Частотный преобразователь — виды, принцип действия, схемы подключения
 Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.
Виды частотных преобразователей
По конструкции частотные преобразователи бывают:
1. индукционного типа;
Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью. Поэтому они не нашли широкого применения в производстве и используются крайне редко.
Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин. При этом может быть реализован один из двух принципов управления:
1. по заранее заданной характеристике зависимости скорости вращения от частоты (V/f);
2. метод векторного управления.
Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования.
Особенности векторного управления частотным преобразованием
Отличием этого способа является взаимодействие, влияние устройства управления преобразователя на «пространственный вектор» магнитного потока, вращающийся с частотой поля ротора.
Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:
1. бессенсорного управления;
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции (ШИМ) инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.
Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом.
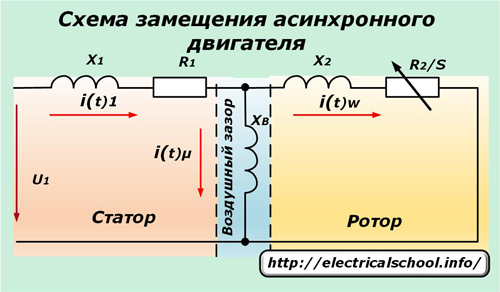
На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1. Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление.
Векторная диаграмма схемы замещения
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя.
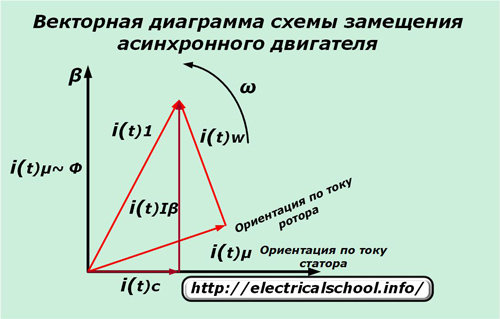
Энергия тока статора разделяется на две части:
iµ — потокообразующую долю;
iw — моментообразующую составляющую.
При этом ротор обладает активным сопротивлением R2/s, зависящим от скольжения.
Для бессенсорного управления измеряются:
По их значениям рассчитывают:
iµ — потокообразующую составляющую тока;
iw — моментообразующую величину.
В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали.
Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя.
Принцип работы частотного преобразователя
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети.
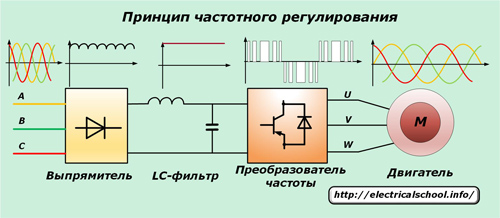
Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью (LC-фильтр), обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами.
Для включения режима «торможения» двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим энергию. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
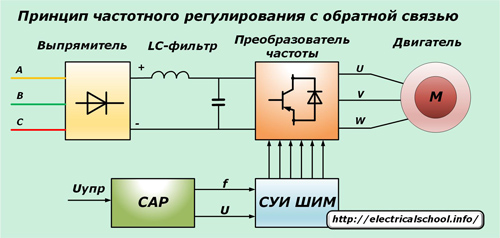
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:
2. ШИМ (широтного импульсного моделирования).
Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя.
Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида.
![]()
Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
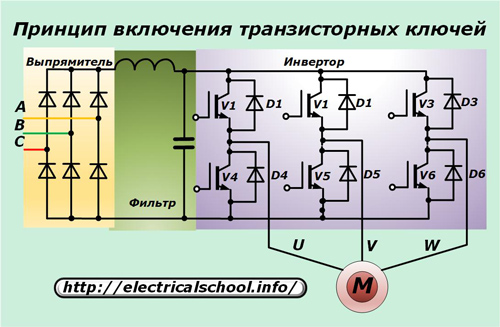
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды.
Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр, ликвидирующий:
наводимые работающим оборудованием электрические разряды.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора.
С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:
ввода связи с расширенными возможностями интерфейса;
информационный Led-дисплей, отображающий основные выходные параметры;
тормозной прерыватель и встроенный ЭМС фильтр;
систему охлаждения схемы, основанную на обдуве вентиляторами повышенного ресурса;
функцию прогрева двигателя посредством постоянного тока и некоторые другие возможности.
Эксплуатационные схемы подключения
Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением 220 вольт, то от них тоже можно запитывать инверторы.

Трехфазные модели рассчитываются на напряжение сети 380 вольт и выдают его на электродвигатель. Однофазные же инверторы питаются от 220 вольт и на выходе выдают три разнесенных по времени фазы.
Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:
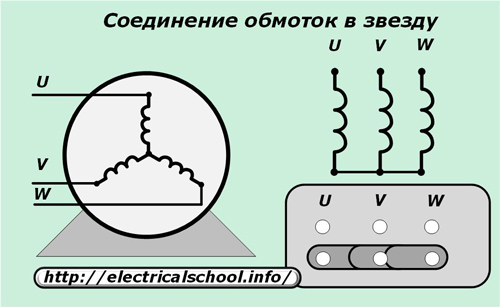
Обмотки двигателя собираются в «звезду» для преобразователя, запитанного от трехфазной сети 380 вольт.
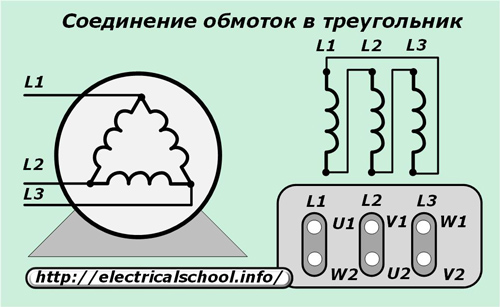
По схеме «треугольник» собирают обмотки двигателя, когда питающий его преобразователь подключен к однофазной сети 220 вольт.
Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу.
Схемы любительских частотных преобразователей
 Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
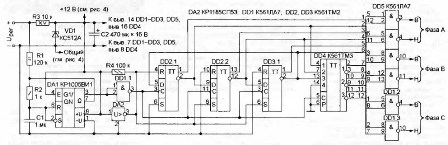
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя 400Гц, а напряжение питания 27В. Кроме того, средняя точка двигателя (при соединении обмоток «звездой») выведена наружу, что позволило предельно упростить схему: понадобилось всего три выходных сигнала, а на каждую фазу потребовался всего один выходной ключ. Схема генератора показана на рисунке 1.
Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электродвигателя M1.
На рисунке 2 показаны временные диаграммы импульсов, сформированных генератором-формирователем. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно установить требуемую частоту вращения двигателя, а также изменять ее в некоторых пределах. Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
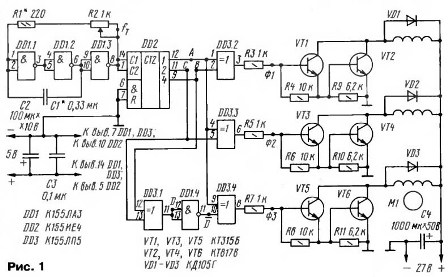
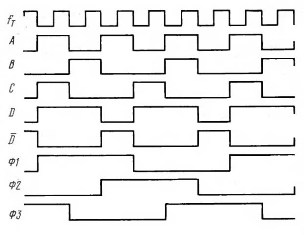
Рисунок 2. Временные диаграммы импульсов генератора.
На базе рассмотренного контроллера А. Дубровским из г. Новополоцка Витебской обл. была разработана конструкция частотно-регулируемого привода для двигателя с питанием от сети переменного тока напряжением 220В. Схема устройства была опубликована в журнале «Радио» 2001г. №4.
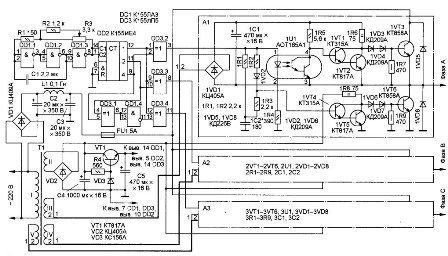
В этой схеме, практически без изменений, используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами A1, A2, и A3, к которым подключается электродвигатель. На схеме полностью показан ключ A1, остальные идентичны. Полностью схема устройства показана на рисунке 3.
Подключение двигателя к выходу трехфазного инвертора
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, приведенную на рисунке 4.
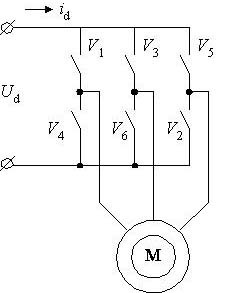
На рисунке показан электродвигатель M, управляемый ключами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Питание электродвигателя осуществляется постоянным напряжением Ud получаемым от выпрямителя (на рисунке не показан). При этом, ключи V1, V3, V5 называются верхними, а ключи V2, V4, V6 нижними.
Совершенно очевидно, что открытие одновременно верхних и нижних ключей, а именно парами V1&V6, V3&V6, V5&V2 совершенно недопустимо: произойдет короткое замыкание. Поэтому, для нормальной работы такой ключевой схемы, обязательно, чтобы к моменту открытия нижнего ключа верхний ключ уже был закрыт. С этой целью контроллеры управления формируют паузу, часто называемую «мертвой зоной».
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. Если эта пауза будет недостаточна, то возможно кратковременное открытие верхнего и нижнего ключа одновременно. Это вызывает нагрев выходных транзисторов, часто приводящий к выходу их из строя. Такую ситуацию называют сквозными токами.
Вернемся к схеме, показанной на рисунке 3. В данном случае верхними ключами являются транзисторы 1VT3, а нижними 1VT6. Нетрудно заметить, что нижние ключи гальванически связаны с управляющим устройством и межу собой. Поэтому управляющий сигнал с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подаются непосредственно на базу составного транзистора 1VT4…1VT5. Этот составной транзистор есть не что иное, как драйвер нижнего ключа. В точности также от элементов DD3, DD4 управляются составные транзисторы драйверов нижнего ключа каналов A2 и A3. Питание всех трех каналов осуществляется от одного и того же выпрямителя на диодном мосте VD2.
Верхние же ключи гальванической связи с общим проводом и управляющим устройством не имеют, поэтому для управления ими кроме драйвера на составном транзисторе 1VT1…1VT2 пришлось в каждый канал установить дополнительный оптрон 1U1. Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного инвертора: когда на выходе 3 элемента DD3.2 высокий уровень открыт транзистор верхнего ключа 1VT3.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно рассматривать как недостаток схемы.
Конденсатор 1C2 обеспечивает задержку переключения ключей около 100 микросекунд, столько же дает оптрон 1U1, тем самым формируется вышеупомянутая «мертвая зона».
Достаточно ли только регулирования частоты?
С понижением частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (достаточно вспомнить формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Одним из способов решения проблемы в любительских частотниках предлагалось это самое эффективное значение регулировать при помощи ЛАТРа, подвижный контакт которого имел механическую связь с переменным резистором регулятора частоты. Такой способ был рекомендован в статье С. Калугина «Доработка регулятора частоты вращения трехфазных асинхронных двигателей». Журнал «Радио» 2002, №3, стр.31.
В любительских условиях механический узел получался в изготовлении сложным, а главное ненадежным. Более простой и надежный способ использования автотрансформатора был предложен Э. Мурадханяном из Еревана в журнале «Радио» №12 2004. Схема этого устройства показана на рисунках 5 и 6.
Напряжение сети 220В подается на автотрансформатор T1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром C1, L1, C2. На выходе фильтра получается изменяемое постоянное напряжение Uрег, используемое собственно для питания двигателя.
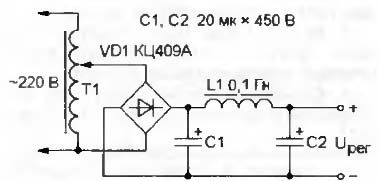
Напряжение Uрег через резистор R1 также подается на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортный вариант NE555). В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН (генератор, управляемый напряжением). Поэтому, при увеличении напряжения Uрег увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.
В той же журнальной статье автор предлагает вариант задающего генератора, который позволяет избавиться от использования автотрансформатора. Схема генератора показана на рисунке 7.
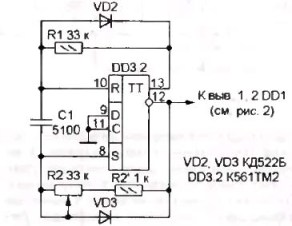
Генератор выполнен на втором триггере микросхемы DD3, на схеме обозначен как DD3.2. Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора: при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Такой принцип управления называется широтно импульсной модуляцией (ШИМ).
В рассматриваемой любительской схеме мощность двигателя невелика, питание двигателя производится прямоугольными импульсами, поэтому ШИМ достаточно примитивна. В реальных промышленных частотных преобразователях большой мощности ШИМ предназначена для формирования на выходе напряжений практически синусоидальной формы, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном моменте, при постоянной мощности и при вентиляторной нагрузке.
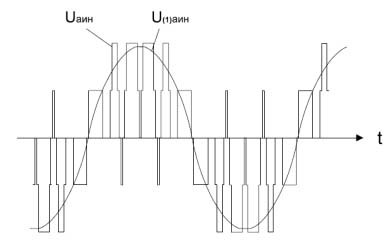
Рисунок 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе мощные транзисторы структуры MOSFET или IGBT, специально предназначенные для работы в преобразователях частоты. В ряде случаев эти транзисторы объединены в модули, что в целом улучшает показатели всей конструкции. Управление этими транзисторами производится с помощью специализированных микросхем-драйверов. В некоторых моделях драйверы выпускаются встроенными в транзисторные модули.
Наиболее распространены в настоящее время микросхемы и транзисторы фирмы International Rectifier. В описываемой схеме вполне возможно применить драйверы IR2130 или IR2132. В одном корпусе такой микросхемы содержится сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Кроме основной функции эти драйверы содержат также несколько дополнительных, например защита от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
При всех достоинствах единственный недостаток этих микросхем их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым, и в то же время работоспособным путем: специализированные микросхемы-драйверы заменены микросхемами интегрального таймера КР1006ВИ1 (NE555).
Выходные ключи на интегральных таймерах
Если вернуться к рисунку 6, то можно заметить, что схема имеет для каждой из трех фаз выходные сигналы, обозначенные как «Н» и «В». Наличие этих сигналов позволяет раздельно управлять верхними и нижними ключами. Такое разделение позволяет формировать паузу между переключением верхних и нижних ключей при помощи блока управления, а не самими ключами, как было показано в схеме на рисунке 3.
Схема выходных ключей с применением микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, что для трехфазного преобразователя понадобится три экземпляра таких ключей.
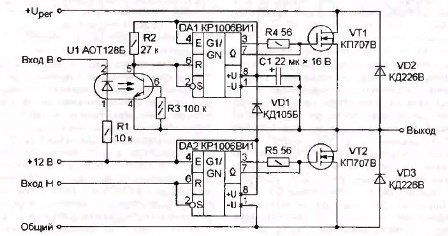
В качестве драйверов верхних (VT1) и нижних (VT2) ключей используются микросхемы КР1006ВИ1, включенные по схеме триггеров Шмидта. С их помощью возможно получить импульсный ток затвора не менее 200мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
Микросхемы нижних ключей DA2 имеют гальваническую связь с источником питания +12В и, соответственно, с блоком управления, поэтому их питание осуществляется от этого источника. Микросхемы верхних ключей можно запитать так же, как было показано на рисунке 3 с использованием дополнительных выпрямителей и отдельных обмоток на трансформаторе. Но в данной схеме применяется иной, так называемый, «бустрепный» метод питания, смысл которого в следующем. Микросхема DA1 получает питание от электролитического конденсатора C1, заряд которого происходит по цепи: +12В, VD1, C1, открытый транзистор VT2 (через электроды сток – исток), «общий».
Другими словами заряд конденсатора C1 происходит в то время, когда открыт транзистор нижнего ключа. В этот момент минусовой вывод конденсатора С1 оказывается практически накоротко соединен с общим проводом (сопротивление открытого участка «сток – исток» у мощных полевых транзисторов составляет тысячные доли Ома!), что и обеспечивает возможность его заряда.
При закрытом транзисторе VT2 также закроется и диод VD1, заряд конденсатора C1 прекратится до следующего открытия транзистора VT2. Но заряд конденсатора C1 достаточен для питания микросхемы DA1 на время, пока закрыт транзистор VT2. Естественно, что в этот момент транзистор верхнего ключа находится в закрытом состоянии. Данная схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
В данной статье рассмотрены лишь самые простые схемы любительских трехфазных инверторов на микросхемах малой и средней степени интеграции, с которых все начиналось, и где можно даже по схеме рассмотреть все «изнутри». Более современные конструкции выполнены с применением микроконтроллеров, чаще всего серии PIC, схемы которых также неоднократно публиковались в журналах «Радио».
Микроконтроллерные блоки управления по схеме более просты, чем на микросхемах средней степени интеграции, имеют такие нужные функции, как плавный пуск двигателя, защита от перегрузок и коротких замыканий и некоторые другие. В этих блоках все реализовано за счет управляющих программ или как их принято называть «прошивок». Именно от этих программ и зависит насколько хорошо или плохо будет работать блок управления трехфазного инвертора.
Достаточно простые схемы контроллеров трехфазного инвертора опубликованы в журнале «Радио» 2008 №12. Статья называется «Задающий генератор для трехфазного инвертора». Автор статьи А. Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. В статье приведены две простых схемы на микроконтроллерах PIC12F629 и PIC16F628.
Частота вращения в обеих схемах изменяется ступенчато с помощью однополюсных переключателей, что вполне достаточно во многих практических случаях. Там же дается ссылка где можно скачать готовые «прошивки», и, более того, специальную программу, с помощью которой можно изменять параметры «прошивок» по своему усмотрению. Возможна также работа генераторов режиме «демо». В этом режиме частота генератора уменьшена в 32 раза, что позволяет визуально с помощью светодиодов наблюдать работу генераторов. Также даются рекомендации по подключению силовой части.
Но, если не хочется заниматься программированием микроконтроллера фирма Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его базе возможно создание недорогих систем регулируемого трехфазного привода, содержащего все необходимые функции для управления и защиты. Подобные микроконтроллеры находят все более широкое применение в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
В комплекте с контроллером MC3PHAC возможно использование готовых силовых модулей, например IRAMS10UP60A разработанных фирмой International Rectifier. Модули содержат шесть силовых ключей и схему управления. Более подробно с этими элементами можно в их документации Data Sheet, которую достаточно просто найти в интернете.







