Назначение рулевого управления. Способы поворота автомобиля

Поскольку орган управления — рулевое колесо — постоянно находится в руках водителя, оно на современных автомобилях выполняет также информационную функцию — по усилиям, вибрациям на рулевом колесе происходит передача водителю информации о состоянии дорожного покрытия, нагруженности контакта колес с дорогой.
Рулевое управление автомобиля должно обеспечивать ощущаемую водителем связь между углом поворота рулевого колеса и направлением движения автомобиля, обладать высокой надежностью. Усилия, необходимые для управления, не должны приводить к повышенной утомляемости водителя и в тоже время должны информировать его о состоянии контакта управляемых колес с дорогой (обеспечивать «чувство дороги»). От рулевого управления зависит минимальный радиус поворота автомобиля на ограниченных площадях. Конструкция рулевого управления не должна передавать ударные нагрузки от неровностей дороги на руки водителя.
Все перечисленные выше требования учитываются при проектировании рулевого управления.
Изменить направление движения автомобиля можно двумя различными способами: за счет поворота колес или звеньев автомобиля в горизонтальной плоскости (кинематический способ) или за счет создания на колесах правого и левого борта различных по величине или по направлению продольных сил (силовой способ) (г).
Для управления большинством современных автомобилей применяется кинематический способ, который может быть реализован путем: — поворота управляемой оси (а);
— поворота управляемых колес (б);
— поворота сочлененных звеньев (складывания рамы) (в).
Поворот управляемой оси — это наиболее старый из известных способов управления. Он применялся еще на двухосных гужевых повозках. При таком способе ось с колесами поворачивалась относительно шкворня, установленного в центре повозки. Система управления получалась очень простой, но требовала сильного сужения передней части кузова для перекатывания управляемых колес, не обеспечивала демпфирования ударов от неровностей дороги на органы управления и при предельных углах поворота оси возникала опасность бокового опрокидывания из-за уменьшения площади опоры автомобиля.
Для частичного устранения указанных недостатков пытались заменить управляемую ось одним колесом, установленным по центру автомобиля (например, автомобиль К. Бенца). В настоящее время такая схема поворота осталась на двух- и трехколесных транспортных средствах. Поворот управляемой оси сегодня применяется только на прицепах.
Принцип управления за счет поворота сочлененных звеньев применяется в случае, когда колеса транспортного средства имеют большие размеры и поворот каждого из них затруднен. Несущая система транспортного средства состоит из двух частей, к каждой из которой присоединена передняя и задняя оси. Обе части соединены друг с другом подвижно с помощью вертикального шкворня. Относительный поворот частей («складывание» рамы или иной несущей системы) происходит с помощью гидравлических цилиндров рулевого управления. К недостаткам данной схемы относится низкая точность управления при высокой скорости, трудность размещения кузовов или кабин на двух подвижных частях рамы, усложнение трансмиссии. В связи с этим данный способ рулевого управления на современных автомобилях применяется редко, основная сфера использования — тихоходные тракторы, дорожно-строительные машины, специальные вездеходы и т. п.
Наибольшее распространение в конструкции автомобиля получило рулевое управление с поворотными колесами. В этом случае каждое управляемое колесо может поворачиваться в горизонтальной плоскости относительно собственной оси поворота. Для синхронизации поворота правого и левого колеса одной оси они связаны шарнирным механизмом — рулевой трапецией.
Рулевая трапеция обеспечивает поворот правого и левого колес на разные углы, что позволяет им катиться на повороте по разным радиусам без проскальзывания.
Основные преимущества указанной схемы поворота: колеса занимают при поворотах небольшой объем внутри кузова, что позволяет удобно размещать над управляемым мостом другие агрегаты автомобиля (двигатель, трансмиссию и т. д.); для поворота колес требуются незначительные усилия, близкое расположение колеса к оси его поворота уменьшает удары, передающиеся от дороги на рулевое управление.
Двухосный автомобиль имеет, как правило, одну переднюю ось с управляемыми колесами. Иногда для улучшения маневренности такие автомобили снабжают всеми управляемыми колесами, но при этом усложняется конструкция рулевого управления и возникают проблемы с управляемостью на высокой скорости. Поэтому на автотранспортных средствах с передними и задними управляемыми колесами при движении с высокими скоростями принудительное управление задними колесами отключают, а колеса фиксируются в нейтральном положении.
Для современных скоростных легковых автомобилей конструкция подвески задних неуправляемых колес и наличие упругих резинометаллических шарниров крепления рычагов к несущей системе (эластокинематика подвески) обеспечивает при движении на повороте незначительные углы поворота колес из-за крена кузова и действия на колеса боковых сил. Это явление называется «доворотом» неуправляемых колес и при правильно спроектированной подвеске позволяет улучшить управляемость в скоростных поворотах.
Одну ось с управляемыми колесами могут иметь и трехосные автомобили, но при условии, что вторая и третья неуправляемые оси сближены. Если эти оси разнесены или автомобиль имеет более трех осей, то для предотвращения бокового проскальзывания колес применяют несколько осей с управляемыми колесами.
При этом водитель непосредственно поворачивает колеса первой оси, колеса прочих осей связаны с первой осью с помощью механических, гидравлических или электрогидравлических передач, которые управляют их поворотом. Управляемые колеса полуприцепов могут поворачиваться в зависимости от угла складывания между автомобилем-тягачом и полуприцепом или двумя частями сочлененных автобусов.
Самоустанавливающаяся ось полуприцепа
В ряде случаев для упрощения конструкции рулевого управления задние поворотные колеса многоосных автомобилей и прицепов делаются самоустанавливающимися, т. е. колеса на повороте сами поворачиваются на углы, при которых на них не воздействуют боковые силы.
Силовой способ поворота автомобиля аналогичен способу поворотов гусеничных машин. При этом способе функции рулевого управления выполняет специальная трансмиссия. При воздействии водителя наорганы управления трансмиссия подтормаживает колеса одного борта с подачей тяговых сил на колеса другого, что вызывает появление момента сил правого и левого борта, который стремится повернуть машину относительно вертикальной оси. Такая схема управления обеспечивает поворот практически на месте. Но силовой способу правления на современных автомобилях почти не применяется, что связано с низкой точностью управления на большой скоростяи, высоким износом шин, необходимостью устанавливать двигатели повышенной мощности и сложные трансмиссии.
Вместе с тем силовой способ управления поворотом все же применяется в современных автомобилях, но не в качестве основного, а как основа функционирования электронной системы стабилизации траектории ESP.
Почему колеса при повороте руля поворачиваются на разный угол?

Если повернуть руль до упора, выйти из машины и посмотреть на нее спереди, можно заметить, что колеса повернуты под разными углами: одно вывернуто сильнее, чем другое. Но это не неисправность, а наоборот, точный инженерный расчет, который в этом году празднует свой юбилей – ему исполняется ровно 200 лет. Почему рулевое управление так спроектировано, и почему нельзя было бы сделать иначе?
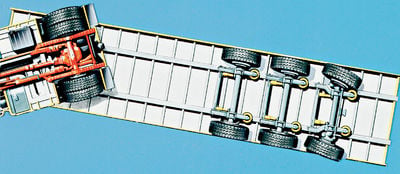
О твет на этот вопрос лежит на поверхности: представьте себе, что автомобиль движется по кругу по часовой стрелке – в этом случае окружность, по которой будет двигаться переднее правое колесо, будет меньше, чем окружность, описываемая левым. Соответственно, при постоянной скорости автомобиля колеса на одной оси будут вращаться с разной скоростью. Если бы колеса были повернуты на одинаковый угол, то внутреннее колесо, стремясь двигаться так же, как наружное, постоянно проскальзывало бы и вызывало проскальзывание наружного – при этом поведение автомобиля в повороте было бы непредсказуемым, а износ шин – катастрофическим. Наглядно это можно видеть на многоосных тележках грузовиков и прицепов: не поворачивающиеся колеса в повороте движутся с проскальзыванием, и шины изнашиваются быстро и неравномерно. Соответственно, для решения этих проблем и обеспечения правильного движения управляемых колес по их траектории они и поворачиваются на разные углы.

Сама проблема проскальзывания внутреннего колеса в повороте была актуальна задолго до массового распространения автомобилей – ведь те же проблемы были и у конных повозок. Собственно, именно на конной повозке рулевое управление, решающее эту проблему, и дебютировало: в 1817 году его изобрел Георг Ланкеншпергер, а в 1918 году запатентовал в Англии его агент Рудольф Аккерман. С тех пор принцип поворота управляющих колес на разные углы в повороте так и называется – принцип Аккермана.
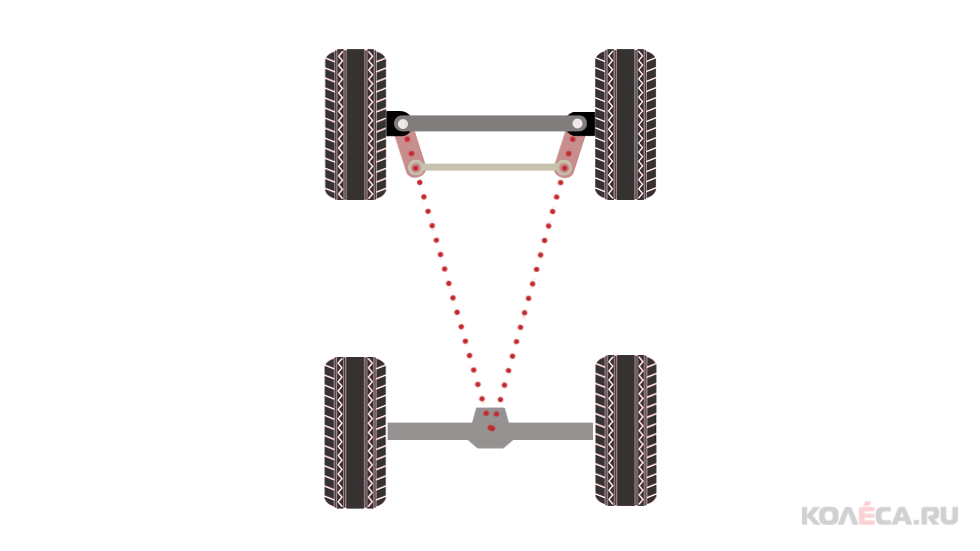
Чтобы обеспечить нужные углы поворота колес, геометрия рулевой трапеции рассчитывается по единой условной схеме. В ней поперечная рулевая тяга короче управляющей оси и смещена за нее, а поворотные рулевые рычаги лежат на линии между осью поворота передних колес и центром задней оси автомобиля. Для того, чтобы проще было понять это сложное на первый взгляд объяснение, достаточно взглянуть на простую схему ниже.
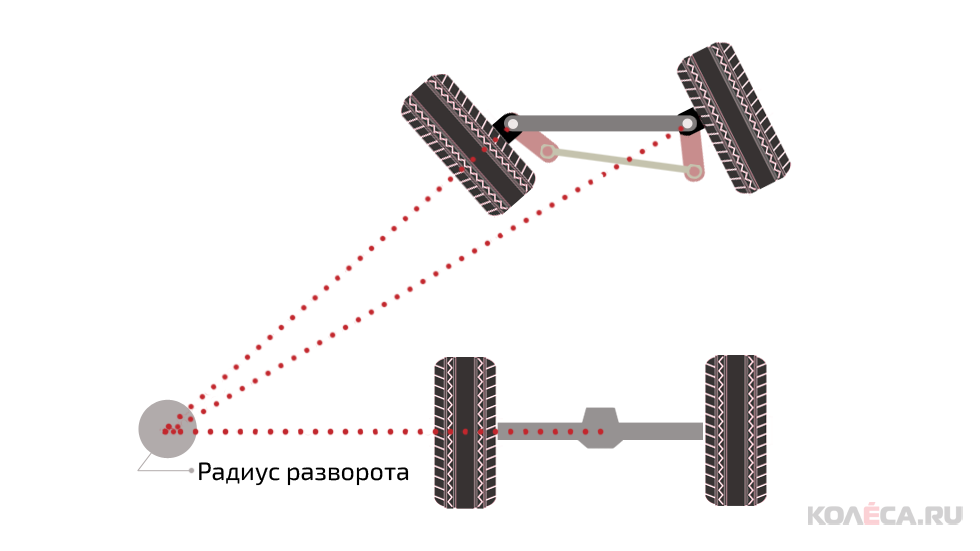
Соответственно, при повороте колес в такой схеме они оказываются повернуты на разные углы – внутреннее поворачивается больше, а наружное меньше. При этом центры окружностей, по которым движутся колеса, совпадают, а радиус окружности для наружного колеса — это фактически радиус разворота автомобиля «от бордюра до бордюра» с поправкой на ширину шины.
Стоит отметить, что изображение выше – схематическое, и рулевое управление автомобиля, разумеется, сложнее, чем то, что изображено на схеме. Однако общая геометрия справедлива для всех «гражданских» автомобилей.
В автоспорте подход может меняться: к примеру, на некоторых гоночных автомобилях ситуация с углами поворота колес может быть даже обратной для компенсации бокового увода колеса в скоростных поворотах, а в дрифте передние колеса стараются сделать параллельными даже в поворотах, чтобы снизить износ передних шин при постоянном движении в управляемом заносе. Но это – крайности, не актуальные для обычных серийных машин.
Кстати, в самом начале мы не зря упомянули не только разные пути, которые проходят в повороте колеса, но и разные скорости их вращения. Для того, чтобы обеспечить возможность вращения колес на одной оси с разными скоростями, как мы уже рассказывали, нужен дифференциал.
При повороте руля колеса поворачиваются на разный угол – почему?
Вы здесь
Сообщение об ошибке

Если руль вывернуть до упора, а затем выйти и посмотреть на машину спереди, то сразу заметно – одно колесо вывернуто сильнее, чем второе. Это не является неисправностью автомобиля, а наоборот, точно выверенный инженерный расчет. Так с какой же целью рулевое управление спроектировано именно таким образом?
Для чего колеса машины поворачиваются под разным углом?
Ответ прост. Представьте ситуацию – машина едет по кругу слева направо (по часовой стрелке), то ее правое переднее колесо будет двигаться по окружности, которая меньше за ту, которую будет описывать левое. Таким образом, при постоянной скорости машины колеса, которые находятся на одной оси будут крутиться с разной скоростью. В случае, когда бы колеса были повернуты под одним углом, то колесо, расположенное внутри, при стремлении двигаться, как и наружное, всегда проскальзывало бы и причиняло проскальзывание внешнего – в повороте управляемость машиной была бы непредсказуемой, а изнашивание шин – просто катастрофическим. Воочию это можно наблюдать на многоосных тележках прицепов и грузовиков: в повороте колеса движутся не поворачиваясь, с проскальзыванием, и в результате – неравномерный быстрый износ шин. Чтобы разрешить эти проблемы и обеспечить правильное вращение управляемых колес, они и вращаются под разными углами.

Каков расчет геометрии движения колес?
Задолго до массовой популяризации машин, возник вопрос о проскальзывании в повороте внутреннего колеса, поскольку такая же проблема наблюдалась и у конных повозок. Собственно говоря, рулевое управление такой повозкой, решающее эту проблему, в 1817 г. и дебютировало. Его придумал Г. Ланкеншпергер, а его агент Р. Аккерман в 1918 г. в Англии запатентовал. С тех времен принцип поворачивания колес на разные углы получил название «принцип Аккермана».
Чтобы гарантировать нужные углы вращения колес, геометрия рулевой трапеции вычисляется по одинаковой схеме. Согласно которой поперечная тяга руля короче оси управления и за нее смещена, а поворотные рычаги руля расположены на линии, которая находится между поворотной осью передних колес и центром задней оси машины.
Колеса, в соответствии с такой схемой, при повороте оказываются развернутыми под разными углами – наружное меньше, чем внутренне. Центры окружностей, по которым вращаются колеса, при этом совпадают, а вот радиус окружности для колеса, находящегося спереди – это по факту радиус разворота машины «от бордюра до бордюра» с коррективом на ширину автошины.

В автоспорте такой подход может не совпадать: на некоторых гоночных машинах, например, ситуация с поворачиванием колес может даже быть противоположной для компенсирования в скоростных поворотах бокового увода колеса, а в дрифте колеса, находящиеся спереди, даже в поворотах пытаются сделать параллельными. Это необходимо для снижения износа передних автопокрышек, при их постоянном вращении в управляемом заносе. Такое решение – крайность и для обычных серийных авто не актуально.







