- Испытаний топливной экономичности автомобиля
- Проходимость и маневренность автомобиля
- Управляемость автомобиля. Оценочные показатели управляемости. Параметры самовозврата управляемых колес и рулевого колеса в нейтральное положение и предельные величины усилий на рулевом колесе АТС , страница 3
- Рулевое управление
Испытаний топливной экономичности автомобиля
Цель работы: освоить методику определения показателей топливной экономичности автомобиля.
Теоретическая часть
Основные положения. Топливной экономичностью называется эксплуатационное свойство, характеризующее расход топлива АТС при движении в различных дорожных условиях.
Используемые в настоящее время оценочные показатели топливной экономичности (ГОСТ 20306-85) не имеют нормированных значений, их используют при сравнительной оценке уровня топливной экономичности с зарубежными аналогами и косвенной оценке технического состояния автомобилей.
Показателями топливной экономичности являются:
1. Контрольный расход топлива (КРТ).
2. Расход топлива в магистральном ездовом цикле на дороге (РТМЦ).
3. Расход топлива в городском ездовом цикле на дороге (РТГЦд).
4. Расход топлива в городском цикле на стенде (РГГЦ).
5. Топливная характеристика установившегося движения (ТХ).
6. Топливно-скоростная характеристика на магистрально-холмистой дороге (ТСХ).

Рисунок 3.1 – Топливно-экономические характеристики автомобиля:
а) при различном дорожном сопротивлении
б) характеристика установившегося движения
Лабораторная работа №4
Испытания маневренности автомобиля
Цель работы: изучить показатели маневренности автомобиля и методы их определения.
Теоретическая часть
Маневренностью АТС называется совокупность свойств, обеспечивающих возможность беспрепятственного поступательного криволинейного движения по опорной поверхности, ограниченной в размерах своей свободной (проезжей) площади и её форме.
Маневренность АТС характеризуется следующими показателями:
1. Минимальный радиус поворота – расстояние от центра поворота до оси следа переднего внешнего колеса при максимальных углах поворота управляемых колес.
2. Минимальный габаритный радиус поворота – расстояние от мгновенного центра поворота до точки автомобиля наиболее приближенной к центру поворота.
3. Поворотная ширина по следу колес – разность радиусов наиболее удаленного и наиболее приближенного к центру поворота следов соответствующих колес.
4. Габаритная полоса движения (ГПД) – разность радиусов поворота точек, наиболее удаленной и наиболее приближенной к центру поворота. Поворотная ширина и ГПД характеризуют ширину коридора, необходимого при совершении крутых поворотов, а также возможность движения в проездах заданной формы и размеров.
5. Удельная сила тяги, потребная при повороте – отношение тяговой силы на ведущих колесах к силе тяжести автомобиля при повороте его с минимальным или близкими к нему радиусом, а также с минимальной устойчивой скоростью Vmin ≈ 5 км/час. Чем меньше удельная тяговая сила, тем меньше нагружается двигатель при переходе автопоезда от прямолинейного к криволинейному движению с крутыми поворотами.
6. Коэффициент использования сцепной силы колес при повороте – отношение суммарной силы, действующей в контакте этих колес, к потенциально возможной силе по сцеплению. Чем меньше это отношение, тем выше возможность автопоезда к совершению крутых поворотов, тем меньше вероятность потери маневренности.
Регламентированными показателями маневренности являются:
— минимальный радиус поворота Rmin ≤12,5 м;
— внутренний габаритный радиус поворота Rгаб ≥5,3 м;
— габаритная полоса движения (ГПД) АТС при повороте не более 7,2 м.
В ФРГ регламентируется также поворотная ширина по следу колес, которая разрешается не более 5,5 м.
Значения этих показателей формируются, в основном, прицепными звеньями автопоезда (рисунок 6).

Рисунок 6 – Показатели маневренности:
а) одиночный автомобиль; б) автопоезд.
Лабораторная работа №5
Дата добавления: 2018-05-12 ; просмотров: 556 ; Мы поможем в написании вашей работы!
Проходимость и маневренность автомобиля

Проходимость автомобиля — это его способность двигаться по плохим дорогам и в условиях бездорожья, а также преодолевать различные препятствия, встречающиеся на пути. Проходимость определяется способностью преодолевать сопротивление качению (используя тяговые силы на колесах), габаритными размерами транспортного средства, способностью автомобиля преодолевать препятствия, встречающиеся на дороге.
Основным фактором, характеризующим проходимость, является соотношение между наибольшей тяговой силой, и силой сопротивления движению. В большинстве случаев проходимость автомобиля ограничивается недостаточной силой сцепления колес с дорогой и в связи с этим невозможностью использовать максимальную тяговую силу. Для оценки проходимости автомобиля по грунту пользуются коэффициентом сцепной массы, определяемым делением массы, приходящейся на ведущие колеса на общую массу автомобиля.
Коэффициент сцепной массы для различных автомобилей отличается и наибольшую проходимость имеют автомобили, у которых все колеса являются ведущими.
В случае применения прицепов, увеличивающих общую массу автопоезда, но не изменяющих сцепную массу, проходимость резко снижается.
На величину сцепления ведущих колес с дорогой значительное влияние оказывает удельное давление шин на дорогу и рисунок протектора. Удельное давление определяется делением массы, приходящейся на колесо, на площадь отпечатка шин. На рыхлых грунтах проходимость автомобиля будет лучше, если удельное давление будет меньше. На твердых и скользких дорогах проходимость улучшается при большом удельном давлении.
Шины с крупным рисунком протектора на мягких грунтах будут иметь отпечаток большей площади и меньшее удельное давление; на твердых грунтах отпечаток этой шины будет меньшей площади и удельное давление увеличивается.
При движении по мягкому или заболоченному грунту применяют арочные шины, дающие большой отпечаток и меньшее удельное давление, а также применяют автомобили, где давление воздуха в шинах может регулироваться.
На проходимость автомобиля влияет также разная ширина колеи передних и задних колес. При совпадении колеи передних и задних колес задние колеса катятся по уже прорезанной колее, поэтому сопротивление их качению уменьшается, а проходимость автомобиля повышается, за исключением болотистой местности, где задние колеса могут проваливаться.
Проходимость автомобиля определяется и по габаритным размерам.
Габаритные параметры проходимости — показатели, характеризующие проходимость подвижного состава по неровностям дороги и его способность вписываться в дорожные габариты. Основными габаритными параметрами проходимости являются: дорожный просвет h, углы переднего α1 и заднего α2 свеса, продольный ρ1 и поперечный ρ2 радиусы проходимости, наружный Rн и внутренний Rв радиусы поворота, поворотная ширина bк коридора, углы гибкости βв в вертикальной и αг в горизонтальной плоскостях.
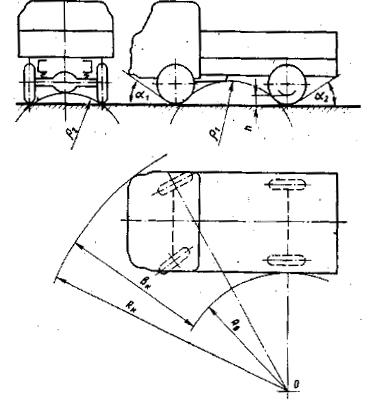
Рис. Габаритные параметры проходимости автомобиля
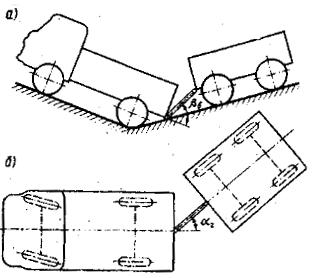
Рис. Углы гибкости в вертикальной (а) и горизонтальной (б) плоскостях
Дорожный просвет — это расстояние между низшей точкой подвижного состава и дорогой. Он характеризует возможность движения без задевания сосредоточенных препятствий (камней, пней, кочек и т.д.). Обычно дорожный просвет находится под картером главной передачи. Величина его зависит от типа подвижного состава и условий его эксплуатации. Так, для грузовых автомобилей дорожной проходимости дорожный просвет составляет 245 …290 мм, а для повышенной проходимости — 315 … 400 мм. Увеличение дорожного просвета приводит к повышению проходимости, что может быть достигнуто увеличением диаметра колес и уменьшением габаритов главной передачи (например, разнесенная главная передача). Однако увеличение дорожного просвета приводит к повышению центра тяжести подвижного состава, в результате чего может ухудшиться его устойчивость.
Углы переднего и заднего свеса — это углы, образованные плоскостью дороги и плоскостями, касательными к передним и задним колесам и к выступающим низшим точкам передней и задней частей подвижного состава. Они характеризуют проходимость по неровным дорогам во время въезда или съезда с препятствия (наезд на бугор, переезд через канаву, яму, кювет и т.д.).
Чем больше величина углов аь и аг, тем большей крутизны дорожные неровности может преодолеть подвижной состав. Для грузовых автомобилей дорожной проходимости углы свеса составляют: а1=25……42° и а2 — 18 …38°, а для повышенной проходимости — соответственно 35 … 55° и 32 … 42°.
Продольные и поперечные радиусы проходимости — это радиусы окружностей, касательных к колесам и низшим точкам подвижного состава соответственно в продольной и поперечной, плоскостях. Эти радиусы определяют контуры препятствий, преодолеваемых подвижным составом без их задевания. Чем меньше указанные радиусы, тем выше проходимость; подвижного состава. Так, например, продольный радиус проходимости для обычных грузовых автомобилей составляет 2,7 … 5,5 м, а для; повышенной проходимости — 2,0 …3,5 м.
Углы гибкости в вертикальной и горизонтальной плоскостях — это углы возможного отклонения оси сцепной петли прицепа от оси тягового крюка. Угол вертикальной гибкости автопоезда характеризует его проходимость по неровностям дороги, а угол горизонтальной гибкости — способность к поворотам, т. е. его маневренность. Для автопоездов с двухосными прицепами углы гибкости составляют: βв не менее ±62° α г не менее ±55°, а для седельных автопоездов βв не менее ±8° и α ± 90°.)
Управляемость автомобиля. Оценочные показатели управляемости. Параметры самовозврата управляемых колес и рулевого колеса в нейтральное положение и предельные величины усилий на рулевом колесе АТС , страница 3
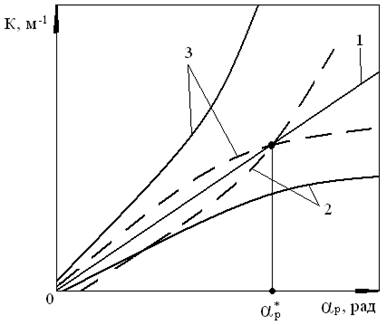
Рисунок 9.1 – Характеристика траекторной управляемости автомобиля: 1 – нейтральная поворачиваемость; 2 – недостаточная поворачиваемость; 3 – избыточная поворачиваемость
При езде с большими скоростями желательно иметь малую чувствительность к повороту, чтобы незначительный неосторожный поворот рулевого колеса не мог вызвать поворот автомобиля с большой кривизной траектории и этим создать опасную ситуацию. Вместе с тем для маневрирования, которое обычно совершается на малой скорости, целесообразно иметь большую чувствительность, чтобы сократить энергозатраты водителя и обеспечить достаточно большие углы поворота управляемых колес при сравнительно небольших углах поворотах рулевого колеса. Желательно иметь характеристику К=f(αp), представленную на рисунке 9.2 (кривая 2). При  получаем недостаточную поворачиваемость, а при
получаем недостаточную поворачиваемость, а при  — избыточную. Такую характеристику может обеспечить рулевой механизм с переменным передаточным числом.
— избыточную. Такую характеристику может обеспечить рулевой механизм с переменным передаточным числом.
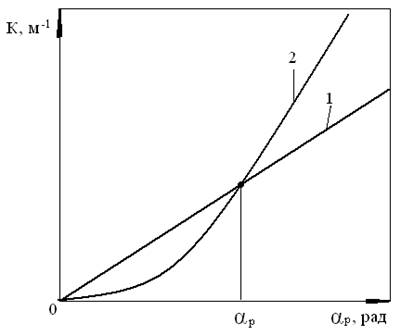
Рисунок 9.2 – Характеристика тракторной управляемости: 1 – нейтральная поворачиваемость; 2 – оптимальная поворачиваемость
Угловую скорость движения автомобиля на повороте определяют как
 . (9.4)
. (9.4)
Характеристика заброса угловой скорости, представляет зависимость  . Заброс угловой скорости не должен превышать величин, приведенных в таблице 9.3.
. Заброс угловой скорости не должен превышать величин, приведенных в таблице 9.3.
Таблица 9.3 – Предельные величины заброса угловой скорости автомобилей
Заброс  при j, м/с 2
при j, м/с 2
Рулевое управление
Рулевое управление портального автомобиля состоит из рулевого механизма и рулевого привода.
Основные требования, предъявляемые к рулевому управлению, заключаются в получении минимального радиуса поворота, значительно меньшего, чем у обычных автомобилей, и обеспечивающего вписываемость автомобиля в полосу движения на перекрестках улиц и проездов складов, и малого усилия на рулевом колесе. Первое требование привело к созданию портальных автомобилей со всеми управляемыми колесами; второе — к использованию усилителей.
Для лучшей маневренности автомобиля, а главным образом для удобства наезда на груз необходимо, чтобы при повороте след задних колес совпадал со следом передних колес-
Уменьшение угла поворота управляемых колес до значений угла поворота ведущих управляемых колес значительно увеличивает радиус поворота. Поэтому выбор оптимального значения углов поворота колес представляет определенные трудности.
Степень совпадения колеи передних и задних колес автомобиля может быть выражена в виде отношения угла поворота управляемого ведущего аув колеса к углу поворота управляемого неведущего колеса аун (внутренних по отношению к мгновенному центру поворота):
Чем ближе это отношение к единице, тем лучше маневренность автомобиля, а следовательно, легче им управлять, особенно при наезде на груз. У большинства современных портальных автомобилей значение ас близко или равно единице (ас
0,8-М,0). У автомобилей с двумя задними управляемыми колесами след задних управляемых колес при повороте не совпадает со следом передних неуправляемых ведущих колес, что является недостатком этих автомобилей.
Рулевое управление относится к числу механизмов, от которых зависит безопасность движения. Поэтому к нему предъявляются такие требования, как надежность, легкость поворота, сохранение правильной кинематики привода при всех положениях управляемых колес, а также минимальное количество шарниров и точек смазки. Особое внимание должно обращаться на жесткость тяг, так как при работе они, как правило, испытывают продольный изгиб.
Принципиальные схемы рулевого управления
На рис. 113 показано несколько принципиальных схем рулевого управления, получивших наибольшее распространение на портальных автомобилях. Принципиальное различие приведенных схем заключается в количестве управляемых колес и наличии усилителей.
По схеме с четырьмя управляемыми колесами выполнено большинство портальных автомобилей. Эта схема, как было показано выше, обладает рядом преимуществ по сравнению со схемой с двумя управляемыми колесами. Недостатком схемы является большое усилие, необходимое для поворота четырех колес и трудность подвода крутящего момента к управляемым подрессоренным ведущим колесам, в связи с ограниченными углами поворота жестких карданов полуосевых передач. Конструктивные мероприятия, проведенные на портальных автомобилях последних моделей, позволили почти полностью ликвидировать эти недостатки. Если на портальных автомобилях, изготовлявшихся до середины 50-х годов, максимальный угол поворота ведущих управляемых колес ограничивался углом поворота стандартных жестких карданов с крестовиной полуосевых карданных передач и не превышал обычно 15°, то в настоящее время этот угол у большинства автомобилей увеличен до 25°, а в некоторых моделях даже до 35—40°.
Для снижения усилия на рулевом колесе на многих автомобилях с четырьмя управляемыми колесами применены различные усилители. Так, например, на всех отечественных автомобилях последних выпусков установлены гидроусилители.
В последние годы появились автомобили, у которых ведущие колеса могут в процессе эксплуатации отключаться водителем от рулевого привода. В этом случае изменение направления движения автомобиля осуществляется поворотом только двух управляемых (неведущих), как правило, передних колес. Отключение ведущих колес снижает не только усилие поворота,

Рис. 113. Принципиальные схемы рулевого управления автомобилей
но и износ шин и положительно сказывается на устойчивости автомобиля в связи с отсутствием тягового усилия на управляемых колесах, вызывающего дополнительный увод и усиливающего тенденцию к заносам.
Стремление уменьшить радиус поворота и сделать его независимым от привода полуосевой карданной передачи, увеличить проходимость и повысить устойчивость привело к созданию портальных автомобилей с задними управляемыми и передними ведущими колесами больших размеров. Для поворота автомобиля, выполненного по этой схеме, требуется гораздо меньшее усилие, чем при схеме с четырьмя управляемыми колесами. Поэтому на этих автомобилях гидро- и пневмоусилители не устанавливают. Схемы с шестью и более поворотными колесами у дорожных автомобилей встречаются довольно редко и применяются в основном у внедорожных портальных автомобилей большой грузоподъемности, предназначенных для перевозки крупногабаритных контейнеров.
Устройство рулевого привода
Каю видно из приведенных на рис. 113 схем, рулевой привод состоит из системы продольных и поперечных тяг, промежуточных маятниковых рычагов, а также рычагов поворота, закрепленных непосредственно на штоках подвески. В отличие от обычных автомобилей рулевой привод портальных автомобилей находится в лучших условиях, так как не может быть поврежден посторонними предметами, лежащими на дороге, и не так подвержен воздействию грязи и влаги, вымывающих смазку.
Поперечные рулевые тяги, попарно соединяющие рычаги поворота штоков, образуют рулевые трапеции, причем в отличие от обычных автомобилей роль балки управляемого моста у портального автомобиля выполняет рама шасси. В зависимости от расположения поперечных рулевых тяг относительно прямой, соединяющей оси штоков подвесок колес на портальных автомобилях различают задние или передние рулевые трапеции. Расположение рулевой трапеции выбирается из условий удобства компоновки. Рулевая трапеция может быть цельной (рис. 114) или расчлененной (рис. 115). Поперечная тяга расчлененной трапеции состоит из двух, реже трех частей, шарнирно связанных между собой. Чтобы не вызывать самопроизвольного поворота колес вследствие неодинаковой деформации упругих элементов подвески правых и левых колес, длину поперечной тяги целесообразно делать как можно большей. Поэтому при расчлененной трапеции маятниковый рычаг и кинематику рулевой трапеции выбирают с таким условием, чтобы за счет перекрытия тяг несколько удлинить длину каждой части тяги.
Применение той или иной схемы рулевого привода зависит от многих эксплуатационных и конструктивных параметров автомобиля. Так, например, при ширине портала более 2000 мм целесообразно применять расчлененную трапецию, так как при большей длине поперечной тяги невозможно обеспечить необходимые углы поворота наружных и внутренних колес. Кроме
того, поперечная тяга начинает терять устойчивость и пружинит, вызывая влияние управля-

Рис. 114. Рулевое управление автомобиля Т-60 с цельной рулевой трапецией и гидроусилителем:
1 и 3 — поворотные рычаги передних колес; 2 и 11 — поперечные рулевые тяги: 4 и 8 — продольные тяги; 5 — регулировочная муфта; 6 — гидроусилитель; 7 — кронштейн промежуточного рычага; 9 — верхняя полуосевая головка; 10 и 13 — поворотные рычаги задних колес;* 12 — промежуточный рычаг; 14 — тяга управления гидроусилителем; 15 — рулевой механизм; 16 — регулировочная головка поперечной рулевой тяги
емых колес. Это снижает устойчивость движения автомобиля и затрудняет управление им. Увеличение диаметра тяг повышает их вес, а следовательно, и вес неподрессоренных масс автомобиля.
Расчлененная рулевая трапеция применяется также на автомобилях, у которых рулевой механизм установлен близко к продольной оси автомобиля. В этом случае усилие от продольных тяг передается на трехплечий горизонтальный рычаг, соединяющий внутренние шарниры (концы) поперечных рулевых тяг. В зависимости от принятой общей схемы рулевого привода усилие на маятниковый рычаг или двуплечий рычаг поворота в схеме с цельной трапецией может передаваться от продольных тяг, соединенных с рулевым механизмом непосредственно (рис. 116), через промежуточные рычаги (горизонтальные или вертикальные) или через усилитель (рис. 117). В последнем случае рулевой механизм соединен с усилителем при помощи рулевой тяги, управляющей его распределительным устройством. Размеры и прочность тяги управления, кинематика рулевого привода и конструкция усилителя должны позво-

Рис. 115. Передняя расчлененная рулевая трапеция автомобиля Р. С. L.: 1 и 6 — поворотные ручагн; 2 и 5 — поперечные тяги; 3 — промежуточный рычаг; 4 — продольная тяга; 7 —гильза подвески; 8 — шток подвески; 9 — кронштейн промежуточного рычага; 10 — головка поперечной тяги
лять управлять автомобилем при выходе усилителя или его привода из строя (аварийный режим). Вполне естественно, что усилие, затрачиваемое на управление автомобилем, в этом случае будет больше допустимого.
Как правило, каждая пара управляемых колес соединяется поперечной рулевой тягой, образуя трапецию. Однако встречаются портальные автомобили (Кларк-Росс моделей S-93, S-95 и S-100), у которых при четырех управляемых колесах имеется только одна поперечная рулевая тяга, расположенная посредине автомобиля. В этом случае усилие от рулевого механизма через продольную тягу передается на левый горизонтальный рычаг, который соединен поперечной рулевой тягой с правым рычагом, образуя трапецию. От этих рычагов усилие через четыре продольные тяги, попарно размещенные по сторонам вдоль автомобиля, передается непосредственно на поворотные рычаги штоков подвески. При такой схеме рулевого привода усилие, приходящееся на поперечную рулевую тягу, возрастает вдвое по сравнению с усилием в обычной схеме с двумя попе-

Рис. 116. Рулевое управление автомобиля Валмет III—IV:
1 и 8 — поворотные рычаги; 2, 5 и 7 — продольные тяги; 3 — рулевой механизм; 4 — ограничительный винт; 6 — промежуточный рычаг; 9 — поперечная тяга
речными рулевыми тягами, но зато из-за того, что длина тяг, соединяющих горизонтальные рычаги с поворотными рычагами штоков, велика, уменьшается виляние управляемых колес.
Проектирование рулевого привода и выбор его элементов ^обычно производят с помощью графических построений, исходя из требований, предъявляемых к рулевым трапециям, и в предположении, что управляемые колеса абсолютно жесткие.
Кинематика и динамика автомобиля на повороте в значительной степени зависит от соотношения углов поворота управляемых колес, которое обеспечивается рулевой трапецией. Если не учитывать увода колес, то для того, чтобы колеса автомобиля на повороте катились без скольжения, рулевые трапеции должны обеспечивать следующие соотношения между углами поворота внешних (3 и внутренних а (по отношению к центру поворота) колес (рис. 118).

Продольные и поперечные тяги рулевых управлений портальных автомобилей снабжают шаровыми шарнирами, заимствованными у обычных автомобилей, вследствие чего зазоры в соединениях продольных тяг устраняются, а поперечные тяги допускают регулировку схождения колес изменением длины тяги.
Размещение и количество продольных рулевых тяг определяются принятым расположением рулевого механизма (левое

Рис. 118. Схемы поворота портальных автомобилей:
а — с четырьмя управляемыми колесами; б — с двумя управляемыми колесами
или правое), условиями компоновки автомобиля и кинематикой рулевого привода.
Для компенсации монтажных отклонений продольные тяги желательно снабжать регулировочными муфтами. Такие муфты с резьбой разного направления, соединяющие две половины одной тяги, использованы в рулевых приводах всех отечественных портальных автомобилей (см. рис. 114). Иногда регулировку длины продольной рулевой тяги производят одной из головок шарнира, для чего на ее хвостовике нарезают резьбу. Такая система более проста в изготовлении, но менее удобна в эксплуатации.
Передаточные числа рулевого управления
Важным параметром рулевого привода является угловое передаточное число гп, которое зависит от соотношения плеч рычагов привода. В процессе поворота колес величина плеч рычагов изменяется, вследствие чего передаточное число рулевого привода, как правило, является непостоянным. В существующих конструкциях оно изменяется в пределах 0,80—1,2.
Угловое передаточное число рулевого управления (отношение угла поворота рулевого колеса к углу поворота
Основные данные рулевых управлений автомобилей t четырьмя управляемыми колесами







