- Лекция 5 Кинематические схемы
- Разработка кинематической схемы машины.
- Кинематическая схема. Кинематическая схема привода. Кинематические схемы механизмов
- Что такое схема кинематическая? Основные понятия
- Области применения кинематических схем
- Правила выполнения схем
- Кто регулирует правильность составления схем?
- Определение строения механизмов
- Виды механизмов
- Что такое привод? Его предназначение
- Кинематическая схема привода
- Кинетическая схема других механизмов
Лекция 5 Кинематические схемы




Кинематическая схема – это схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины и из взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения без соблюдения размеров и пропорций.
Все элементы на схеме обозначают условными графическими обозначениями согласно ГОСТ 2.770-68 ЕСКД Обозначения условные графические в схемах.
Кинематические схемы выполняют в соответствии с требованиями
ГОСТ 2.703-2011 ЕСКД Правила выполнения кинематических схем.
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. На схеме он обозначается, как правило, окружностью с буквой М в середине.
Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
Основные условные обозначения
| Наименование | Обозначение |
| Вал, валик, ось, стержень, шатун и т.п. |  |
| Подшипники скольжения и качения на валу (без уточнения типа) |  |
| Муфта. Общее обозначение без уточнения типа |  |
| Передачи фрикционные: а) с цилиндрическими роликами |  |
| Передача ремнем без уточнения типа ремня |  |
| Передача плоским ремнем |  |
| Передача клиновым ремнем |  |
| Наименование | Обозначение |
| Передача круглым ремнем |  |
| Передача зубчатым ремнем |  |
| Передача цепью, общее обозначение без уточ- нения типа цепи |  |
| Передачи зубчатые (цилиндрические): а) внешнее зацепление (общее обозначение без уточнения тина зубьев) |  |
| б) то же, с прямыми, косыми и шевронными зубьями |  |
| Передачи зубчатые с пересекающимися валами, конические |  |
| Наименование | Обозначение |
| Передачи зубчатые со скрещивающимися валами: а) червячные с цилиндрическим червя ком | 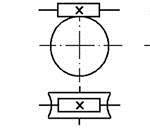 |
| б) червячные глобоидные |  |
| Передача винт-гайка |  |
| Электродвигатель |  |
Пример описания кинематической схемы:

Вращательное движение от электродвигателя 1 через муфту(упругую) 2 передается на вал Ӏ с зубчатым колесом 3 ( обычно это шестерня), которое зацепляется с зубчатым колесом 4 второго вала ӀӀ. Зубчатая передача является цилиндрической косозубой и расположена в корпусе 5. На вал ӀӀ насажен звездочка 6 цепной передачи. С помощью цепи движение передается на выходной вал ӀӀӀ через вторую звездочку. Опорами валов являются подшипники.
Разработка кинематической схемы машины.
Кинематическая, гидравлическая, пневматическая схемы машины отражают соответствующие принципы взаимодействия и работы элементов машины. Эти схемы дают представление о том, как механическая энергия и движение передаются от источника до пункта её потребления и преобразования. Схемы являются принципиальными и позволяют установить, какие элементы и сколько их входят в устройство и в каких сочетаниях (кинематических парах) они объединяются.
Кинематические схемы вычерчивают в виде плоскостного (вид спереди и вид сбоку) и пространственного изображений. На кинематической схеме указывают наименование каждой кинематической группы элементов и основные характеристики и параметры кинематических элементов. Если кинематическая схема служит для динамического анализа, то на ней указывают необходимые размеры и характеристики элементов. Каждому кинематическому элементу на схеме присваивают порядковый номер, валы нумеруют римскими цифрами, а остальные элементы – арабскими.
На кинематических схемах указывают тип, мощность и частоту вращения электродвигателей, размер, исполнение и передаточное отношение редукторов, диаметр и ширину шкивов, типы и количество клиновых ремней, число зубьев и модули зубчатых передач, число заходов, шаг и направление нагрузки червяков и так далее.
В качестве примера на рис. 4.1 приведена кинематическая схема двухступенчатого редуктора [2].
 Рис.4.1. Кинематическая схема двухступенчатого редуктора.
Рис.4.1. Кинематическая схема двухступенчатого редуктора.
I (Т) — тихоходный вал; II — промежуточный вал;
III (Б) – быстроходный вал.
Конечной целью проектирования кинематической схемы машины является воспроизведение заданных движений рабочих органов. При проектировании необходимо учитывать динамические свойства механизмов, так как они определяют динамические нагрузки и характер движения звеньев кинематических цепей.
В основе расчёта кинематических цепей механизмов лежат две задачи динамики: по известному закону движения ведущего звена определить силы, приложенные к звеньям механизма и по известным силам определить закон движения по уравнениям Лагранжа.
Первая задача решается методом кинетостатики по уравнению Даламбера [1]. Так, например, для кинематической цепи, трансформирующей кратные круговые движения
 (4.1)
(4.1)
где МКР = МДВ — крутящий и движущий моменты; МС – момент сопротивления; J — момент инерции.
Вторая задача заключается в определении закона движения в соответствии с уравнением Лагранжа. Так, для кинематической цепи, реализующей линейно-круговые движения, уравнение Лагранжа имеет вид:
 (4.2)
(4.2)
где РДВ и Р С — сила движущая и сила сопротивления; Jпр и mпр— приведённые моменты инерции и масса; Z — количество элементов кинематической цепи.
Гидравлические и пневматические механизмы являются завершающими элементами в гидро – и пневмосистемах, в которых, помимо этих механизмов, имеются двигатели – насосы, регуляторы давления и расхода рабочего тела (масла, воздух); распределители и переключатели потоков рабочих тел, контрольно-измерительные приборы и так далее.
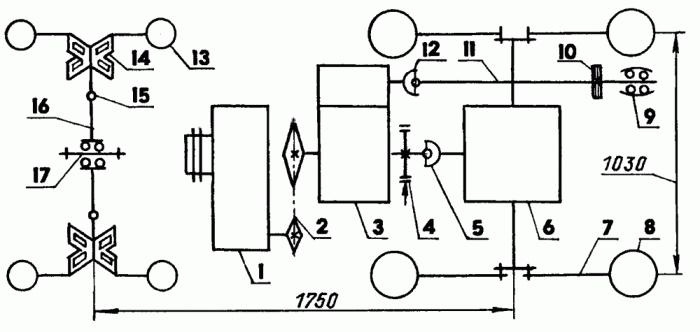
Перечень элементов кинематических, гидравлических и пневматических схем оформляют в виде таблицы. На полях схем допускается указывать данные, необходимые для монтажа, испытания и проверки системы: маркировка трубопроводов, рабочие среды, рабочие давления, температуру и др. На рис. 4.2 показана гидравлическая схема механизма для приведения в движение силового поршня, шток которого связан с рабочим органом машины.

Рис.4.2 Гидравлическая схема механизма.
1 – распределитель; 2,6 – электромагниты; 3 – гидроцилиндр; 4 – поршень; 5 – тормозное устройство; 7 – масляный бак; 8 – фильтр; 9 – клапан переливной; 10 – гидронасос.
Схема пневматического механизма имеет аналогичный вид, только насос заменяется источником сжатого воздуха (компрессором), а выброс отработавшего воздуха производится в атмосферу.
Совокупность кинематических, гидравлических и пневматических элементов и устройств на схемах изображают в виде условных графических символов (рис.4.1; 4.2)
4.2 Методы расчёта механизмов при проектировании БМП
Кинематический расчёт выполняют с целью выбора типа механизма и определения таких размеров его звеньев, при которых механизм обеспечивает перемещение исполнительного органа по заданному закону в соответствии с требованиями технологического процесса.
Кинематические параметры механизмов определяют динамичность технологических нагрузок, давлений в кинематических парах и напряжений в звеньях механизмов.
Методы определения размеров звеньев и расчёта элементов кинематических пар для механизмов различных типов различны.
Основными задачами силового расчёта механизмов являются задачи определения при заданных условиях давления в кинематических парах; определение величины и закона движущих сил, размеров звеньев, обеспечивающих оптимальные динамические условия работы механизма.
Для удовлетворения требований работоспособности механизма его звенья и кинематические пары должны быть правильно рассчитаны.
К тихоходным механизмам применят статический метод силового расчета, при котором учитываются все действующие на механизм нагрузки, кроме инерционных.
К быстроходным машинам применяют кинетостатический метод расчета с учётом всех действующих сил, включая силы инерции.
В результате кинетостатического расчета можно определить давление в кинематических парах, силы, воздействующие на звенья; а также определить движущую силу, обеспечивающую движение механизма, нагруженного внешними силами:
РДВ = РС + РИ (  m) (4.3)
m) (4.3)
где РС и РИ (  ,m) – силы сопротивления и инерции, приведённые к главному звену; и m — ускорение и масса звена приведения.
,m) – силы сопротивления и инерции, приведённые к главному звену; и m — ускорение и масса звена приведения.
При динамическом проектировании новых механизмов сначала задаются приближённым законом движения ведущих звеньев механизма и внешними силами, а затем после определения конструктивных размеров звеньев решают вопрос об истинном движении спроектированного механизма с учётом различных действующих на него сил. После этого в ранее выполненный расчёт вносят необходимые коррективы.
Дата добавления: 2015-09-25 ; просмотров: 3376 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Кинематическая схема. Кинематическая схема привода. Кинематические схемы механизмов
Без кинематической схемы невозможно представить ни один вид оборудования. Речь идет как об автомобилях, тракторах, станках, так и о более простых типах механизмов. В целом кинематика представляет собой специальный отдел в механике, который направлен на изучение свойств звеньев механизмов. Наука позволяет провести кинематический анализ посредством изучения траекторий движения звеньев, определения точек, положений и скоростей элементов. Достижение конечного результата невозможно без обоснования понятия «кинематическая схема», о чем и пойдет речь в данной статье.
Что такое схема кинематическая? Основные понятия
Если коротко ответить на этот вопрос, то кинематическая схема — это некий рисунок или документ, если так можно выразиться, на котором изображены все механические звенья с указанием размеров. Очень часто звенья схемы называют кинематическими парами. Если дать определение научным языком, то это сопряженные твердые элементы в количестве 2 штук, которые благодаря условиям связи ограничивают движение друг друга.
Наличие размеров необходимо для проведения кинематического анализа, который изучает основы движения механизмов, их траектории и скорости. Решить задачи кинематики можно как графически, так и экспериментально.
В общем, о кинематической схеме мы говорим тогда, когда анализируем тип механизма. Им называют некую систему тел, которая преобразует движение одних для требуемого движения других. В состав любого механического элемента входят звенья — несколько твердых частиц, жестко соединенных между собой. Звено, которое считают неподвижным, называют стойкой.
Элементом кинематической пары или звена называют систему поверхностей и линий, по которой одно звено соприкасается с другим. Эту точку еще именуют узлом сопряжения.

Области применения кинематических схем
Кинематическая схема применяется абсолютно во всех областях промышленности — машиностроении, станкостроении и т. д. Все правила выполнения регулируются специальным документом — так называемым ГОСТом.
Правила выполнения схем
Существует несколько основных законов составления кинематических чертежей:
- Документ может быть выполнен как на бумаге, так и на электронном носителе. Рекомендуется составлять конструкторские схемы на одном листе с возможностью деления его на необходимые форматы при печати.
- В случае использования сложных схем допускается применение мультимедийных средств, то есть можно показать движение в динамике наглядным образом.
Кинематические чертежи подразделяют на три вида: принципиальные, структурные и функциональные. Правила их составления также отличаются друг от друга.
Что касается принципиальных схем, то на рисунке обязательно должны быть нанесены все виды связей между элементами. Документ предоставляют в виде развертки. Принципиальная кинематическая схема, обозначения которой разработчик указывает на полях, должна изображаться в контуре изделия в аксонометрической проекции. Более подробные правила по их составлению можно узнать по ГОСТ 2.303 и 2.701.
Главное отличие структурных схем от принципиальных заключается в том, что на первых изображаются функциональные части изделия и отношения между ними. Как правило, их представляют в виде графических изображений или аналитической записи.
Функциональные схемы иллюстрируют взаимосвязи между частями элементов, которые изображаются простыми геометрическими фигурами.
Кто регулирует правильность составления схем?
Правила составления прописаны в межгосударственных документах по стандартизации. За вступление в силу этого документа проголосовало большинство стран мира много лет назад. Периодически в ГОСТ вносятся изменения, это и понятно — научный прогресс не стоит на месте, наука развивается, а вместе с ней претерпевают изменения и регулирующие документы. Помимо основного стандарта, правила выполнения кинематических схем прописаны в в Единой системе конструкторской документации.
Определение строения механизмов
Как уже было сказано выше, все механизмы состоят из определенного количества кинематических пар. Они подразделяются на несколько основных:
- по виду места связи — на низшие и высшие;
- по способу замыкания;
- по относительному движению в паре — на поступательные, вращательные, цилиндрические и т. д.
Кинематические схемы механизмов определяют их структуру. Если дать этому понятию определение, то это — совокупность всех элементов устройства и отношений между ними. Кроме того, чтобы определить строение механизма, нужно установить состав входящих звеньев.
На основе приведенных классификаций выделяют основные виды элементов машины, которые определяют ее строение:
Виды механизмов
Существует большое количество различных конструкций. Чаще всего механизмы подразделяют на:
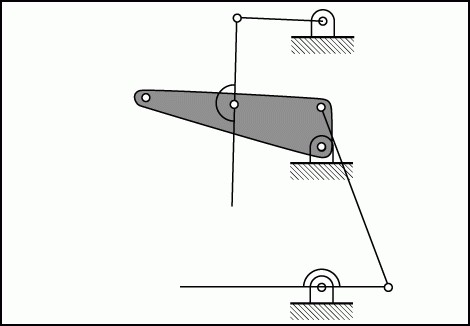
- рычажные или стержневые;
- фрикционные;
- кулачковые;
- механизмы с гибкими звеньями;
- зубчатые и др.
Среди основных классификаций механизмов выделяют такую, которая подразделяет их на три группы:
- функциональные (по принципу выполнения технологического процесса);
- структурные (по строению);
- структурно-конструктивные (по конструктивным принципам).
Более подробно о кинематических схемах будет рассказано на примере электропривода.
Что такое привод? Его предназначение
Прежде чем говорить о кинематической схеме привода, нужно знать, что это такое. Привод — специальное устройство, которое приводит в действие машины при помощи двигателя. Иными словами, механизм начинает движение от потока энергии, которая идет либо от двигателя, либо от дополнительных элементов. Кинематическая схема редуктора незаменима при изучении понятия «привод». Это устройство представляет собой механизм из червячных или зубчатых колес, который передает вращение от двигателя непосредственно к валу машины. Его корпус состоит из подшипников, валов и зубчатых колес.

Кинематическая схема привода
В любом приводе все элементы, связанные между собой, оказывают определенное влияние друг на друга. То есть изучения движения только одного звена будет недостаточно, важно учитывать и их взаимное влияние. Для этого все силы в конструкции приводят к единой точке, как правило, это вал двигателя. Кинематическую схему привода называют эквивалентной, а параметры — приведенными.
Схемы этого оборудования состоят из таких основных элементов, как:
- электродвигатель;
- открытая передача;
- редуктор;
- приводной вал машины;
- муфта.
Это классический состав кинематической схемы, некоторые элементы могут отсутствовать.

Кинетическая схема других механизмов
Кинематика — наука, изучающая различные конструкции, поэтому для любого типа оборудования схема своя. Рассмотрим чертеж наиболее часто встречаемого агрегата — станка. Конечно, существует целый ряд других механизмов, и на изучение их схем может уйти масса времени. Изображения сложных конструкций более детально рассматриваются учеными, механиками и любителями кинематики.
Станок — простой пример механизма, который приводится в действие благодаря определенным силам. Исполнительными органами конструкции являются: стол, суппорт, шпиндель и другие детали. Цепи кинематики станка состоят из различных передач, которые размещены в определенной последовательности. Кинематические схемы передач могут иметь в своем составе ременные, зубчатые или червячные механизмы. На чертеже все элементы обозначаются специальными знаками, которые прописаны в ГОСТе 3462-61. Кинематическая схема станка обязательно включает в себя шаги ходовых винтов, модули захода червяков, число оборотов двигателей, мощность и т. д.
Современное оборудование имеет не только механические передачи, зачастую применяют гидравлические или пневматические устройства, и, соответственно, в паспортах станков можно встретить не кинематические схемы, а комбинированные пневмогидравлические или электрические.
Современный мир машин и деталей огромен, существуют тысячи разнообразных механизмов и элементов. Однако каждый механический агрегат имеет свою кинематическую схему, будь то кран, подвеска автомобиля, металлорежущий станок или буровая вышка. Кинематические чертежи и конструкторские описания помогают разобраться со структурой и составом механизмов, облегчают процесс изучения движения элементов и звеньев в цепи. Благодаря таким схемам и науке кинематике в целом научно-технический прогресс не стоит на месте, появляются все более совершенные механизмы, станки и агрегаты, которые активно входят в нашу с вами жизнь.







