- Подводная часть для лодочного мотора
- Гидродинамика подводной части подвесного мотора
- Баланс мощностей
- Показатель гидродинамической эффективности
- Виды гидродинамических потерь
- Потери из-за подводной части
- Баланс мощностей «на языке КПД»
- «Механизм» влияния «ноги» ПМ на работу его ГВ
- Гидродинамические характеристики ПМ
- Пути снижения гидродинамических потерь
- Подведем итоги
Подводная часть для лодочного мотора
Пособие для водителей катеров, яхт, лодок, судов, водного транспорта
29.05.2015 21:47
дата обновления страницы
1 6 / 04 /20 07
История изменения сайта
Читать стати: Триста практических советов по катерам, яхтам, лодкам, водным судам. Найдете все советы, самоделки, доработки, рекомендации.
Подвеска лодочного мотора, подводная часть
Подвесные моторы укрепляются на транце судов посредством кронштейнов, воспринимающих вес мотора и передающих судну силу тяги гребного винта (см. рис- 50 и 77). На транце лодки кронштейн (см. рис. 77) закрепляете» двумя винтами 11\ винты снабжены качающимися подпятниками, которые упираются в доску транца.
Кронштейны подвесных лодочных моторов должны обладать высокой прочностью при небольшом весе; обычно они делаются литыми из алюминиевых сплавов-
Подводная часть. У подавляющего большинства подвесных лодочных моторов, за исключением бортовых и так называемых рулевых моторов, передача вращения коленчатого вала гребному винту осуществляется посредством конической зубчатой передачи.
Пара конических шестерен с валиками и подшипниками находится в отлитой из легкого алюминиевого сплава подводной части. У более мощных подвесных моторов в подводной части помещаются водяная помпа, механизм свободного хода или реверсивное устройство.
Для уменьшения сопротивления, оказываемого водой при движении, подводной части мотора придается обтекаемая форма. Чтобы облегчить изготовление подводной части мотора» ее делают разборной, состоящей из двух частей, скрепленных между собой шпильками и гайками.
Для предохранения лопастей гребного винта от поломок при наезде на препятствие на подводной части имеется шпора,, отлитая за одно целое с коробкой подводной части.
Гребной винт фиксируется на валике латунной шпилькой, которая срезается при встрече винта с препятствием, чем предохраняются от поломки винт и зубья конических шестерен.
Гребной винт укрепляется на валу гайкой-обтекателем, навертываемой на резьбовую часть выступающего из ступицы носка валика. Гайка входит в торец валика до упора. Между гайкой и ступицей гребного винта должен быть небольшой зазор, для того чтобы усилие затяжки гайки не передавалось на латунную шпильку; в противном случае гайка во время работы мотора может отвернуться и винт будет потерян.
При быстром движении позади корпуса подводной части мотора образуется разрежённое пространство, через которое к лопастям гребного винта может просасываться воздух, отчего тяга мотора падает: винт как бы пробуксовывает, вращаясь с большим числом оборотов в эмульсии воздуха с водой.
Для того чтобы устранить возможность проникновения воздуха к гребному винту, на корпусе подводной части делается антикавитационная пластина, расположенная горизонтально, несколько выше кромки лопасти гребного винта при вертикальном ее положении.
Конструкция подводной части моторов ЗИФ-5 и «Стрела» показана на рис. 70. Подводная часть состоит из. двух основных частей; проставки 3 и корпуса шестерен 11.
Ведущая шестерня 5 конической зубчатой передачи выполнена за одно целое с вертикальным валиком, который на двух подшипниках 2 монтируется в проставке 3.
Ведомая шестерня 9 фиксируется на валу гребного винта 15 сегментной шпонкой, вал установлен в корпусе коробки шестерен 11 на двух шарикоподшипниках. Один шарикоподшипник 6 — радиальноупорный — запрессовывается в гнездо в коробке шестерен, другой 10 — радиальный — находится в крышке 18 коробки шестерен 11.
Рис. 70. Подводная часть подвесных моторов ЗИФ-5 и «Стрела»: 1 — гайка крепления ведущей шестерни; 2-шарикоподшипник; 3-проставка; 4-прокладка; 5-шестерня ведущая; 6-радиально-упорный подшипник; 7-шайба регулировочная; 8 — пробка сливная; 9-шестерня ведомая; 10-шарикоподшипник; 11-корпус шестерен; 12-сальник; 13-гребной винт; 14-гайка сальника; 15-вал гребного винта; 16- гайка гребного винта; 17-штифт; 18-крышка; 19-шпонка
В крышке коробки шестерен, имеющей левую резьбу, расположен резиновый сальник 12, предотвращающий попадание воды в коробку шестерен. Затяжка сальника производится при помощи гайки сальника 14, имеющей левую резьбу.
Регулировка зазора между зубьями конических шестерен производится подбором толщины паронитовой прокладки 4, находящейся между фланцами корпуса шестерен и проставкой, и подбором толщины регулировочной шайбы 7.
Подбор долевого расстояния между шарикоподшипниками вала гребного винта производится путем постановки шайб под крышу коробки шестерен. Гребной винт 13- двухлопастный отлит из алюминиевого сплава. На валу винт закрепляется штифтом 17, который срезается, если винт заденет подводное препятствие. Такое приспособление предотвращает возможность поломки лопастей винта.
Рис. 71. Подводная часть подвесного лодочного мотора «Москва» с реверсивным устройством
Гайку винта 16 затягивают настолько, чтобы между ступицей винта и торцом гайки был зазор, равный 0,1-0,15 мм. Для смены смазки в коробке шестерен имеется резьбовая сливная пробка 8.
Более мощные подвесные моторы (10 л. с. и более) обычно снабжаются механизмом свободного хода, позволяющим отключать гребной винт от его привода и реверса, дающим возможность получить задний ход судна. Наличие свободного хода и реверса значительно улучшает маневренные качества судна с подвесным мотором и повышает безопасность плавания.
Рис. 72. Управление реверсом подвесного мотора «Москва»: 1-ручка реверса; 2-штуцер для подсоединения шланга водоотлива (откачка воды из лодки); 3-выброс воды, откачиваемой из лодки; 4- крышка штуцера
Реверсивным приводом гребного винта, обеспечивающим передний и задний ход судна, а также работу двигателя вхолостую, оборудован подвесной лодочный мотор «Москва» мощностью 10 л. с. Устройство подводной части этого мотора показано на рис. 71.
Коробка шестерен 1 соединяется с корпусом подводной части 2 при помощи двух болтов и шпильки. Вращение от вала двигателя передается длинным вертикальным валиком 3, на нижнем конце которого сидят малые конические шестерни 4 и 5, сцепляющиеся торцовыми зубьями с храповиком 6, скользящим по шлицам вала. При этом они через большую коническую шестерню 7 приводят во вращение вал винта и гребной винт 8.
Направление вращения винта зависит от того, с какой из шестерен-4 или 5 — сцеплен храповик 6. Храповик имеет нейтральное (среднее) положение, при котором вращение на винт не передается; это положение соответствует «Холостому ходу»- Управление храповиком через тягу 9 выведено к ручке левой стороны мотора. Ручка реверса (см. рис. 72) имеет три положения: «Передний ход», «Холостой ход» и «Задний ход».
Коробка шестерен заполняется смазкой (нигролом) и должна быть герметична. Отъемная часть коробки 10 ставится на паронитовой прокладке. Толщина этой прокладки должна быть строго определенной, так как от нее зависит величина зазора между зубьями шестерен реверс-редуктора. Герметичность коробки шестерен достигается постановкой резиновых сальников на вертикальном валике, вале гребного винта и переключающей тяге.
Для заливки в коробку шестерен смазки, а также для слива ее имеются резьбовые отверстия, закрывающиеся пробками с уплотнительными прокладками.
В ступице гребного винта находится промежуточная резиновая втулка 11, являющаяся амортизатором, благодаря чему соединение винта с валом является упругим. Для того чтобы резиновая втулка не проворачивалась в ступице винта, она имеет пазы, в которые входят торцовые приливы. Кроме того, с другой стороны резиновой втулки заформовано кольцо с пазом, в который входит срезающийся штифт 12 гребного вала.
Гидродинамика подводной части подвесного мотора
Предлагаемая вниманию читателей статья совсем не о моторах «Нептун» и «Вихрь», как может показаться на первый взгляд. Это, скорее, наглядная иллюстрация того, к чему приводит пренебрежение гидродинамикой подводной части подвесного мотора. Но поскольку эти моторы есть и еще, видимо, долго будут у огромного числа водномоторников на всем пространстве бывшего Союза, для них, по моему мнению, будет интересна идея автора об «эквивалентной» внешней характеристике ПМ при измененной гидродинамике его подводной части. По сути, при этом к стандартной паспортной внешней характеристике двигателя ПМ добавляется «гидродинамический выигрыш» от новой подводной части. Такой подход наверняка заинтересует всех разработчиков и испытателей ПМ.
Справедливости ради нужно отметить, что идея использования подводной части «Нептуна» с более мощным двигателем впервые была успешно испробована много лет назад еще первыми нашими спортсменами-гонщиками. Однако точные оценки полученных при этом выигрышей в мощности и экономичности сделаны только теперь — в статье канд. техн. наук В. К. Елисеева. Сама же техника реализации гибрида «Вихря» и «Нептуна», увы, не сводится только к промежуточной проставке между двигателем и дейдвудом. Однако при некоторых слесарных навыках и, главное, горячем желании получить недорогой более мощный и экономичный ПМ все эти трудности преодолимы, конечно, для тех, кто творчески подходит к решению возникающих проблем, а не для «ездюков», как говорят у нас в Киеве.
Автор статьи предлагает свежую идею — оценивать эффективность ПМ величиной гидродинамического качества (по аналогии с таким коэффициентом для отдельно взятого гребного винта). Этот показатель для ПМ более общий, чем общепринятый пропульсивный коэффициент.
Весьма нагляден и познавателен также анализ видов гидродинамических потерь ПМ и их взаимосвязи. Особенно интересен «сюжет» о влиянии ноги ПМ на работу его винта. Проделав скрупулезную вычислительную работу, автор, в частности, убедительно выявил одну из главных причин ухудшения гидродинамики любого ПМ — сильную неоднородность набегающего на ГВ потока воды. Этот фактор совершенно не учитывается в известной литературе. Собственно, такого влияния и следовало ожидать в связи с крайней несимметричностью корпуса редуктора любого ПМ.
Достаточно неожиданные результаты получены автором и для коэффициентов попутного потока и засасывания, позволившие уточнить известные справочные данные. Между прочим, такое расхождение данных связано, на мой взгляд, с бытующим до сих пор нечетким представлением о гидродинамических факторах, влияющих на работу винта ПМ: часто говорят о взаимном влиянии ГВ и корпуса моторной лодки, а не ГВ и корпуса редуктора ПМ — поскольку корпус МЛ гидродинамически независим от ПМ.
Водномоторникам, особенно с опытом конструктивных доработок серийных ПМ, будет интересна та часть статьи, где автор анализирует возможные выигрыши в мощности и экономичности при различных конструктивных усовершенствованиях подводной части ПМ.
Увидев заголовок статьи, саркастически настроенный читатель наверняка подумает: «Ну, вот, опять высокая материя, а тут денег даже на бензин не хватает. » — и будет глубоко не прав!
Эта «высокая материя» имеет непосредственное отношение к топливной экономичности подвесного мотора, показатель которой — «тяговая» работа на 1 кг топлива («КиЯ» №173) — пропорционален пропульсивному коэффициенту ПМ — главной гидродинамической характеристике любого движительного комплекса с гребным винтом. Кроме того, именно «гидродинамические нюансы» создают, например, заметное преимущество 23-сильного «Нептуна-23» перед 25-сильным «Вихрем-М» и в скорости хода, и в топливной экономичности.
Наконец, анализ этих нюансов позволяет выяснить долю и причины потерь мощности ПМ из-за гидродинамических факторов, чтобы затем попытаться уменьшить их влияние не только за счет рационального выбора типа ПМ, но и возможных конструктивных усовершенствований имеющегося ПМ.
Баланс мощностей
Известно (№173), что с гидродинамической точки зрения ПМ можно рассматривать в качестве независимого «толкача на транце» глиссирующей МЛ и, следовательно, построить для него баланс мощностей — как это принято в тяговых расчетах судов-буксировщиков (см., например, «Справочник судоводителя речного флота» под ред. Г. И. Ваганова, Л., Транспорт, 1983).
Для ПМ составляющими этого баланса являются мощности: на коленчатом валу Ne, на гребном валу N0 (т. е. подводимая к ГВ), полезная мощность Nп, «вложенная» в упор ГВ, и тяговая мощность Nт, расходуемая на преодоление сопротивления воды (т. е. приложенная к транцу МЛ). Графики баланса мощностей строят в зависимости от скорости хода v.
На рис. 1 и 2 приведены такие графики для отечественных ПМ «Вихрь-30», «Вихрь-М» и «Нептун-23», полированные ГВ которых имеют один и тот же диаметр (d=0.24 м) и шаг (l=0.3 м), но несколько отличающиеся по дисковому отношению (у «Вихрей» θ=0.527, у «Нептуна-23» θ=0.490). При этом использованы опубликованные в «КиЯ» данные гидродинамических испытаний в опытовом бассейне, а коэффициенты потерь в помпе и шестернях редуктора приняты равными 0.935 — на основе консультаций автора непосредственно с разработчиками «Вихрей» и «Нептунов».
Если бы ГВ работал «в свободной воде», т. е. без влияния «ноги» ПМ, то он развивал бы мощность Nр, вложенную в упор изолированного ГВ. Эта мощность рассчитана непосредственно по диаграммам кривых действия ГВ «В.3.50» серии Трооста из книги-первоисточника (Ван-Ламмерен, Троост и Конинг, «Сопротивление, пропульсивные качества и управляемость судов», Л., Судпромгиз, 1957) с поправками на несовпадение дисковых отношений согласно «КиЯ» №16.
Показатель гидродинамической эффективности
Графики мощности Nа движителя (см. рис. 1 и 2) соответствуют упору «идеального гидравлического движителя» — образно говоря, той наивысшей, но, увы, практически недостижимой планке минимальных потерь для любого судового движительного комплекса. При данной величине упора эта мощность зависит только от диаметра ГВ.
В теории судовых движителей гидродинамическую эффективность изолированного ГВ (т. е. «в свободной воде») оценивают величиной коэффициента качества ГВ ζ=Nр/Nа. По аналогии, гидродинамическую эффективность всего ПМ можно оценивать величиной коэффициента качества ПМ εмот=Nт/Nа=ζ·εподв, где коэффициент εподв=Nт/Nр характеризует гидродинамическую эффективность подводной части данного ПМ. Подчеркнем, что коэффициент εподв учитывает как взаимодействие ГВ с корпусом редуктора, так и гидродинамическое сопротивление самого редуктора (подводной части) ПМ.
На рис. 3 приведены графики зависимостей коэффициентов качества εмот и εподв для наших ПМ. Как и следовало ожидать, в диапазоне скоростей хода 18-40 км/ч гидродинамическая эффективность «Нептуна-23» примерно на 10-15% выше, чем «Вихрей», причем это обусловлено конструкцией его подводной части (а не режимом работы и параметрами практически одинаковых ГВ).
Виды гидродинамических потерь
График баланса позволяет «разложить по полочкам» разновидности гидродинамических потерь, определив их доли в общих потерях мощности ПМ. Согласно рис. 1, суммарные гидродинамические потери ΔNгидр, равные разности мощностей N0 и Nт, состоят из двух главных слагаемых: потерь ΔNсвоб, присущих ГВ «в свободной воде», и потерь ΔNконстр, которые определяются конструкцией подводной части ПМ, т. е. наличием «ноги» ПМ.
В свою очередь, потери ΔNсвоб изолированного ГВ, равные разности между мощностями N0 и Np, складываются из потерь ΔNсвоб=N0−Nа, характеризующих эквивалентный «идеальный движитель», потерь ΔNзакр на закрутку потока воды за ГВ и профильных потерь ΔNпроф. Последние обусловлены в основном вязкостью жидкости и зависят от конфигурации лопастей и ступицы ГВ.
Наконец, при недостаточно глубоком погружении ГВ возникают дополнительные потери, связанные с волнообразованием. Их устраняет антикавитационная плита ПМ, играющая роль «днища корпуса» у нашего «толкача на транце».
Вторая компонента общих потерь — потери ΔNконстp, равные разности мощностей Nр и Nт. Эти потери, в свою очередь, состоят из двух основных слагаемых (см. рис. 1 и 2): потерь на сопротивление редуктора (подводной части) ПМ ΔNред=Nп−Nт и потерь ΔNвл=Nр−Nп из-за влияния «ноги» ПМ на работу его ГВ.
Зависимость сопротивления редуктора от скорости хода может быть либо рассчитана, либо найдена экспериментально. В данной статье использованы результаты упомянутых выше экспериментов.
Потери из-за подводной части
Характер этих потерь рассмотрим на примере двух ПМ — «Нептуна-23» и «Вихря-М», близких по мощности, но разных по конструкции «ноги». На рис. 4 для каждого из них приведены зависимости от скорости хода общих относительных (т. е. отнесенных к мощности) гидродинамических потерь ΔNгидр; потерь ΔNконстр, связанных с конструкцией «ноги»; потерь ΔNвл из-за влияния редуктора ПМ на работу его ГВ и потерь ΔNред на сопротивлении этого редуктора. Как видим, и общие ΔNгидр, и «конструктивные» ΔNконстр потери у «Нептуна-23» ниже, чем у «Вихря-М».
Но самое удивительное то, что у «Нептуна-23» сопротивление редуктора не ниже, а выше! «Нептун-23» обходит «Вихрь-М» за счет более совершенной конструкции «ноги», у которой значительно меньше потери мощности ΔNвл из-за взаимодействия ГВ с редуктором. В очередной раз хочется «снять шляпу» перед разработчиками «Нептунов»!
Подчеркнем, что здесь и далее гидродинамические потери соотносятся с мощностью N0 на гребном валу, а не с мощностью Ne на коленчатом валу ПМ, хотя бы потому, что паспортная мощность зарубежных ПМ измеряется именно на гребном валу (у отечественных ПМ она измеряется фактически так же, но затем пересчитывается с учетом «механических» потерь ΔNмех) 1 .
Если полагать, что ГВ конкретного ПМ по конфигурации и качеству поверхности (полировке) в точности соответствует прототипу ГВ (в нашем случае — упомянутому выше винту «В.3.50» серии Трооста), то потери ΔNвл могут быть обусловлены физическими эффектами засасывания (коэффициент засасывания t), попутного потока (коэффициент попутного потока w) и неоднородности потока, набегающего на ГВ (коэффициент неоднородности потока i).
Баланс мощностей «на языке КПД»
В теории судовых движителей их потери характеризуют величинами КПД. У ГВ «в свободной воде» это ηр=Nр/N0, у реального ГВ за корпусом (в нашем случае — редуктора) это η0=Nп/N0, который принято называть пропульсивным коэффициентом. Тогда влияние «ноги» ПМ выражается через коэффициент влияния ηвл, так что η0=ηвл·ηр. В свою очередь, коэффициент влияния «расшифровывается» через коэффициенты t, w и i:
С учетом сказанного график баланса мощностей «на языке КПД» сводится к формуле эффективного КПД:

где ηбукс=Nт/N0 — буксировочный КПД мотора (с учетом «буксировки самого себя»); ηмех=N0/Nе, — КПД «трансмиссии» ПМ (в наших расчетах он равен 0.935); ηред=Nт/Nп — коэффициент влияния сопротивления редуктора (подводной части) ПМ.
Заметим, что в некоторых публикациях, посвященных экспериментам с ПМ, иногда пропульсивным коэффициентом не совсем корректно называют эффективный КПД ηе, хотя, как видно, это даже не буксировочный КПД, который, между прочим, достаточно просто выражается через показатели гидродинамической эффективности изолированного ГВ ηр и подводной части ПМ εподв:ηбукс=ηр·εподв.
«Механизм» влияния «ноги» ПМ на работу его ГВ
Для наших ПМ этот механизм объясняют графики рис. 5,а-5,г зависимостей от скорости хода коэффициентов влияния ηвл, засасывания t, попутного потока w и неоднородности потока i. Графики построены на основе известной в теории судовых движителей графоаналитической методики обработки кривых действия ГВ «в свободной воде» и за корпусом судна (у нас — редуктора ПМ).
Как и следовало ожидать, значения коэффициентов влияния ηвл «Вихрей» и «Нептуна-23» существенно различны: у «Вихрей» усредненное значение этого коэффициента равно 0.77, у «Нептуна-23» — 0.93. Иначе говоря, взаимодействие подводной части «Вихрей» с их ГВ «съедает» в среднем на 20% больше мощности, чем у «Нептуна-23».
Остальные графики рис. 5 преподносят сплошные «гидродинамические сюрпризы»! Во-первых, характер зависимости t и w от скорости хода существенно зависит от особенностей конструкции подводной части ПМ. И, скорее всего, по мнению автора, для ПМ с его асимметричной «гондолой», антикавитационной плитой и небольшой глубиной погружения ГВ понятия «засасывания» и «попутного потока» носят достаточно условный характер.
Во-вторых, к известным рекомендациям по учету взаимодействия редуктора ПМ и его ГВ нужно относиться, по меньшей мере, осторожно. Например, в диапазоне скоростей 18-40 км/ч коэффициент неоднородности потока i у «Вихрей» в среднем равен 0.79, а у «Нептуна-23» — 0.94. Поэтому одно только предложение принять этот коэффициент равным единице завышает пропульсивный коэффициент, например, у «Вихря-30» на 20-25%. Несколько меньше эта погрешность для «Нептуна-23» — 5-10%.
В стандарте ОСТ 5.0155-74 «Суда малые быстроходные для народного потребления. Методика расчета ходкости» предписано принимать для ПМ следующие значения коэффициентов взаимодействия: w=0.025, t=0.045, i=1.0. Тогда ηвл=0.98, в то время как по данным эксперимента, например, для «Вихря-М» ηвл=0.73. Погрешность в оценке степени влияния редуктора на ГВ, как видим, составляет порядка 20%! Для «Нептуна-23» эта погрешность меньше — около 5%. Видимо, упомянутый ОСТ относится к ПМ с «хорошей» конструкцией подводной части.
Несколько более корректны рекомендации «Справочника по малотоннажному судостроению» (Л., Судпромгиз, 1987): w=0.02-0.03 и t=0.04-0.06. Увы, и здесь коэффициент неоднородности потока принят равным единице.
Согласно рис. 5,б и 5,в в диапазоне скоростей 18-40 км/ч в качестве ориентировочных оценок для наших ПМ можно принять усредненные значения w=0.02-0.04 и t=0.04-0.05.
Гидродинамические характеристики ПМ
Для водномоторника более наглядны конкретные цифры гидродинамических характеристик ПМ при определенной скорости хода. В качестве примера в табл. 1-4 приведены такие характеристики для ПМ, «навешенных» на виртуальную тестовую МЛ (№181) водоизмещением D0 при частоте вращения коленвала n0, «тяговой» топливной экономичности e0, фактической мощности Ne и коэффициенте использования максимальной (паспортной) мощности m, которая движется полным ходом с экономичной скоростью 28 км/ч, что обеспечивает максимальную величину Е0 транспортной работы, выполненной на одном литре топлива. Как видно, «Нептун-23» существенно выигрывает у обоих «Вихрей» по всем показателям гидродинамической эффективности (см. табл. 2).
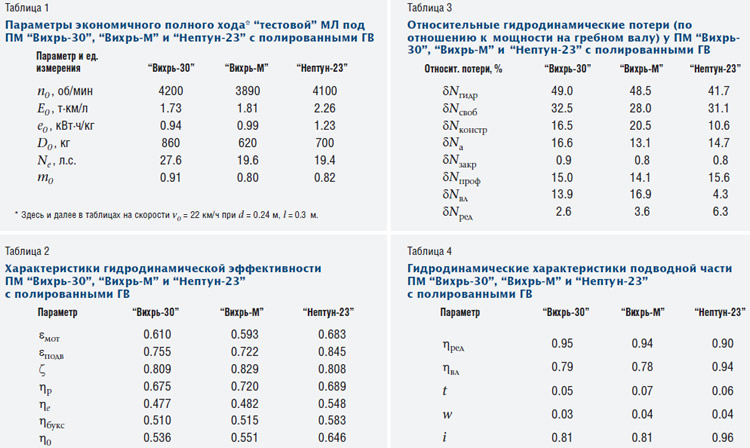
Сравнение различных видов гидродинамических потерь (см. табл. 3) показывает, что конструкция «ноги» у «Нептуна-23» вызывает вдвое меньшую долю потерь по сравнению с «Вихрем-М», за счет чего у первого ПМ значительно — более чем на 15% — снижены общие гидродинамические потери. Еще более любопытна «расшифровка» общих потерь у «Нептуна-23»: его потери ΔNвл из-за взаимодействия ГВ с «ногой» меньше, чем у «Вихря-М» почти в 4 раза! И это при том, что потери на сопротивление редуктора «Нептуна-23» почти вдвое больше! Таким образом, мы сделали еще один шаг к разгадке «гидродинамического секрета» ПМ «Нептун-23».
Отметим также примерно одинаковую для всех наших ПМ долю потерь «в свободной воде» при весьма незначительном — менее 1% — «вкладе» потерь на закрутку потока.
Табл. 4 позволяет еще глубже «проникнуть в тайну» высокой гидродинамической эффективности «Нептуна-23», коэффициент влияния у которого более чем на 20% выше, чем у «Вихря-М». И главная причина этого — намного более высокий уровень неоднородности потока, в котором работает ГВ у «Вихрей»!
Пути снижения гидродинамических потерь
Перейдем к возможным путям снижения гидродинамических потерь мощности у ПМ, что преследует двоякую цель: с одной стороны, повышение доли полезной мощности и, соответственно, упора ГВ, а значит скорости МЛ, а с другой — уменьшение потерь мощности, т. е. повышение буксировочного КПД и, соответственно, топливной экономичности ПМ.
Наиболее очевидный путь уменьшения потерь — снижение гидродинамического сопротивления «ноги» ПМ. Оценим возможную эффективность таких мер на примере наших ПМ (см. рис. 1-2). Как видно, это сопротивление наиболее ощутимо «съедает» мощность на гребном валу у «Нептуна-23»: на скорости 40 км/ч — до 16%. У «Вихрей» эта цифра меньше — 7-9%. Отсюда — несколько парадоксальный вывод: меры по уменьшению сопротивления «ноги» более эффективны не для «Вихрей», а для более «благополучного» «Нептуна-23»! Тем не менее все публикации в «КиЯ» по доработке подводной части посвящены только «Вихрям».
Полировка подводной части уменьшает сопротивление на 10% (№72), что, например, на скорости 40 км/ч эквивалентно приращению мощности на гребном валу «Нептуна-23» на 0.3 л.с., а «Вихря-30» — на 0.2 л.с. Около 15-20% сопротивления «ноги» приходится на козырек газовыхлопа. Поэтому переделка под газовыхлоп через торец антикавитационной плиты (№ 103) позволяет получить дополнительный выигрыш: вместе с полировкой у «Вихря-30» на скорости 40 км/ч — более 0.5 л.с., у «Нептуна-23» — почти 1.0 л.с.
Опиливание корпуса редуктора уменьшает площадь поперечного сечения и, соответственно, сопротивление, например, у «Вихрей» примерно на 10%. Это дает почти такой же эффект, что и полировка подводной части.
Таким образом, все эти меры позволяют снизить сопротивление редуктора в лучшем случае на 40%. За счет этого у «Вихря-30», например, на скорости 40 км/ч можно выиграть до 0.8 л.с. мощности на гребном валу. Много это или мало — судить самому водномоторнику, но надо иметь в виду, что «механические» потери мощности в помпе и редукторе составляют почти 2.0 л.с.
Второй путь снижения потерь — устранение, насколько возможно, взаимодействия ГВ с корпусом редуктора, что особенно актуально для «Вихрей». Для уменьшения этого явления в «КиЯ» №103 предложено увеличить расстояние между ГВ и стойкой редуктора и между концами лопастей ГВ и антикавитационной плитой. Потенциальный выигрыш от этих мер можно оценить, взяв для сравнения «ногу» «Нептуна-23». Тогда на скорости 40 км/ч эквивалентное приращение мощности на гребном валу «Вихря-30» доходит до 3.7 л.с.! Эффект в несколько раз больший, чем от снижения сопротивления редуктора!
Если предположить, что в современных зарубежных ПМ воплощены, как минимум, лучшие черты доработанных подводных частей наших ПМ, то величину их потерь ΔNконстр можно считать равной примерно 12%, что практически вдвое ниже, чем у лучшего в этом плане отечественного «Нептуна-23».
Еще одно направление уменьшения потерь — снижение их уровня «в свободной воде». Для этого можно пытаться воздействовать на потери «идеального движителя» ΔNа, потери от закручивания потока ΔNзакр и профильные потери ΔNпроф.
Известно, что потери ΔNа можно снижать, во-первых, увеличивая диаметр ГВ, во-вторых, с помощью кольцевой насадки, своего рода неподвижного кольцевого крыла вокруг ГВ. Однако у ПМ предельный диаметр ГВ ограничен конструктивными соображениями, а кольцевая насадка для наших ПМ при скорости хода выше 18 км/ч практически неэффективна.
Для снижения потерь ΔNзакр существует целый ряд мер. Это контрвинты (контрпропеллеры) — своего рода неподвижные ГВ, установленные перед основным вращающимся ГВ или после него; соосные ГВ, вращающиеся в противоположных направлениях; руль с аэродинамическим профилем после ГВ; специальные неподвижные направляющие наделки-спойлеры перед ГВ. (Между прочим, такие спойлеры могут устранять неоднородность потока, набегающего на ГВ.) Для наших ПМ в диапазоне скоростей 18-40 км/ч эти меры неактуальны, поскольку потери мощности от закрутки невелики.
Доля профильных потерь ΔNпроф в диапазоне скоростей 18-40 км/ч у отечественных ПМ составляет 15-20% при условии, что реальный ГВ — точная полированная копия его прототипа. Если это не так, то профильные потери могут существенно возрасти, что объясняет достаточно высокую эффективность мер по доработке ступицы и полировке штатных ГВ, которые, по сути, убирают «технологическую» часть профильных потерь, доводя их до уровня ГВ-прототипа.
Профильные же потери самого прототипа можно уменьшить, применив новый, более совершенный вид ГВ вместо штатного или усовершенствовав штатный ГВ, например, за счет пластинок-контрацепторов на концах лопастей либо сплошной профилированной кольцевой ленты по окружности ГВ. Целесообразность последнего вызывает, однако, определенные сомнения.
Не исключено, что высокая эффективность доработки и полировки штатного ГВ обеспечивается и за счет улучшения конфигурации ГВ-прототипа, когда, например, несколько изменяется профиль лопасти.
Замена подводной части — наиболее радикальный путь снижения потерь, известный еще первым водномоторникам-спортсменам. А любительский «Вихре-Нептун» — двигатель «Вихря-30» плюс «нога» «Нептуна-23» — был изготовлен и успешно испытан еще полтора десятка лет назад (№139).
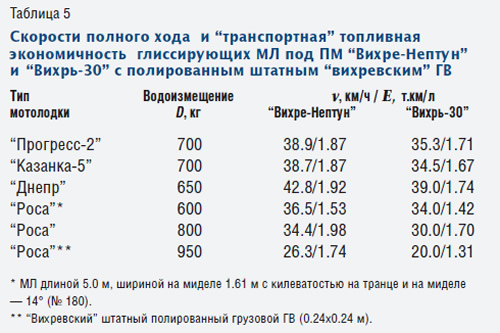
С помощью стандартной компьютерной программы, разработанной в свое время для расчета характеристик «Вихря-30» (№180), для «Вихре-Нептуна» получены зависимости эффективного упора Р и частоты вращения коленвала n от скорости хода v с различными ГВ (рис. 6). Как видно, в интервале скоростей 34-42 км/ч упор «Вихре-Нептуна» с «вихревским» ГВ в среднем на 25% больше, чем «Вихря-30».
Это дает для конкретных МЛ (табл. 5) увеличение скорости хода и транспортной топливной экономичности в среднем на 10%. Особенно эффективен «Вихре-Нептун» на тяжелых МЛ: с грузовым ГВ он выигрывает у «Вихря-30» с таким же ГВ в скорости и транспортной топливной экономичности Е более 30%! А по показателю «тяговой» топливной экономичности е в диапазоне частот вращения коленвала 4300-5000 об/мин (35-43 км/ч) «Вихре-Нептун» превосходит «Вихрь-30» примерно на 20-30%, уступая «Нептуну-23» не более 10%.
При максимальной паспортной частоте вращения коленвала 5000 об/мин выигрыш в мощности на гребном валу составляет 5.2 л.с. Это можно рассматривать как эквивалентное увеличение паспортной мощности «Вихря-30» почти на 20%! При частоте вращения 4300 об/мин «гидродинамический» выигрыш в мощности еще больше — 9.3 л.с., что составляет 33% фактической мощности при этих оборотах и эквивалентно мощности ПМ «Вихрь-30» в 37.4 л.с.! Что говорить, впечатляющая иллюстрация роли «гидродинамических нюансов»!
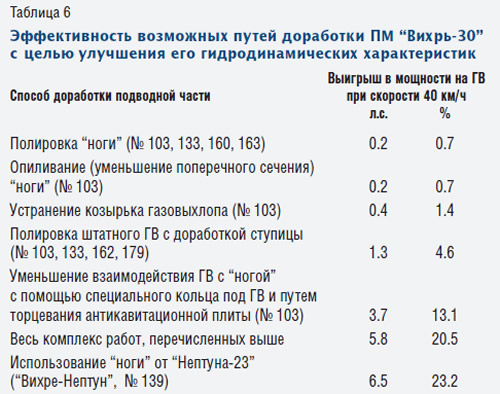
В табл. 6 сведены данные о результативности рассмотренных выше путей повышения гидродинамической эффективности на примере ПМ «Вихрь-30». Любопытно отметить, что полировка ГВ с доработкой его ступицы дает больший эффект, чем вместе взятые полировка и доработка самой «ноги» ПМ. И все же, как и следовало ожидать, для «Вихрей» более перспективен путь уменьшения взаимодействия подводной части с ГВ.
Подведем итоги
1. Гидродинамическую эффективность ПМ наиболее полно характеризует коэффициент качества, основанный на сопоставлении с «идеальным гидравлическим движителем».
2. Во взаимодействии ГВ с «ногой» ПМ большую роль играет неоднородность потока, набегающего на ГВ. Значения коэффициентов неоднородности, засасывания и попутного потока зависят и от скорости хода, и от конструкции «ноги». Поэтому к известным рекомендациям по коэффициентам взаимодействия ГВ подвесника с корпусом глиссирующей МЛ следует относиться, по меньшей мере, осторожно.
3. Снижение гидродинамических потерь ПМ позволяет увеличить скорость хода и улучшить топливную экономичность. Возможны два таких пути: уменьшение потерь из-за конструкции «ноги» ПМ и потерь самого ГВ «в свободной воде»:
- «конструктивные» потери из-за «ноги» можно снизить как за счет уменьшения ее гидродинамического сопротивления, так и взаимодействия ее с ГВ;
- потери «в свободной воде» связаны с понятиями «идеального гидравлического движителя», закрутки потока за ГВ и профильных (вязкостных) потерь, обусловленных конфигурацией лопастей и ступицы ГВ. Уменьшать потери «идеального движителя» можно либо увеличивая диаметр ГВ, либо с помощью неподвижной кольцевой насадки вокруг ГВ.
4. У «Вихрей» и «Нептуна-23» со штатными «вихревскими» ГВ в диапазоне скоростей 18-40 км/ч гидродинамические потери «съедают» примерно половину мощности, подводимой к гребному валу, а гидродинамическая эффективность «Нептуна-23» на 10-15% выше, чем «Вихрей». Доля потерь из-за конструкции «ноги» колеблется от 5 до 30%, причем эффект взаимодействия «ноги» с ГВ у «Нептуна-23» в 3-4 раза меньше, чем у «Вихрей».
5. У современных зарубежных ПМ гидродинамические потери из-за конструкции «ноги» предположительно вдвое меньше, чем у «Вихрей».
6. Гидродинамический выигрыш от доработок вихревской «ноги» может доходить до 15% мощности на гребном валу «Вихря-30». Для наших ПМ при скоростях 18-40 км/ч снижение потерь от закрутки потока неактуально, а потерь, связанных с «идеальным движителем», практически нереально. Профильные потери могут быть существенно уменьшены путем доработки штатного ГВ или за счет перехода к более эффективному ГВ-прототипу.
7. Использование у «Вихря-30» гидродинамически более совершенной «ноги» от «Нептуна-23» обеспечивает «гидродинамический» выигрыш мощности на гребном валу в 20-30%, что эквивалентно увеличению фактической мощности «Вихря-30» в диапазоне 4300-5000 об/мин до 35 л.с.!







