- Особенности пуска двигателя постоянного тока с независимым возбуждением
- Особенности пуска двигателя постоянного тока с независимым возбуждением
- 2.2.2. Пуск двигателя постоянного тока независимого возбуждения
- 2.3. Двигатель постоянного тока последовательного возбуждения (дпт-пв)
- 2.4. Двигатели переменного тока
Особенности пуска двигателя постоянного тока с независимым возбуждением
При включении в сеть ДПТ в начальный момент якорь неподвижен, а, следовательно,  . В этих условиях ток якоря (пусковой ток) ограничивается только электрическим сопротивлением обмоток и щеточных контактов в цепи якоря
. В этих условиях ток якоря (пусковой ток) ограничивается только электрическим сопротивлением обмоток и щеточных контактов в цепи якоря
 . (3.2)
. (3.2)
Так как величина сопротивления якоря мала, пусковой ток двигателя может в 10-40 раз превышать номинальный ток двигателя. Такое превышение начального пускового тока недопустимо, так как ведет к перегреву обмоток, появлению слишком большого пускового момента, который оказывает на якорь и подвижную часть электропривода ударное воздействие, что может привести к механическому повреждению движущихся частей электропривода. При больших значениях тока нарушаются нормальные условия коммутации, что может привести к повреждению коллектора.
Уменьшение пускового тока, как видно из (3.2), возможно двумя способами: снижением напряжения питающей сети или повышением сопротивления якорной цепи.
При введении в цепь якоря внешнего сопротивления начальный пусковой ток будет определяться выражением
 .
.
Таким образом, можно подобрать сопротивление резистора, при котором начальный пусковой ток  не превысит допустимого значения, который обычно составляет два номинальных значения
не превысит допустимого значения, который обычно составляет два номинальных значения  . Выбранное сопротивление, правда, удовлетворит только началу пуска, так как в обмотке якоря начнет индуцироваться ЭДС двигателя при вращении, величина которой пропорциональна скорости вращения.
. Выбранное сопротивление, правда, удовлетворит только началу пуска, так как в обмотке якоря начнет индуцироваться ЭДС двигателя при вращении, величина которой пропорциональна скорости вращения.
Чтобы поддерживать пусковой ток, а, следовательно, и пусковой момент на прежнем уровне, необходимо уменьшить сопротивление резистора. С этой целью в цепь якоря включают резистор переменного сопротивления, называемый пусковым реостатом со ступенчатой регулировкой сопротивления. В настоящее время ручной пуск применяется для управления крановыми двигателями, с целью создания пониженных скоростей подъема или спуска. На других механизмах, в основном, применяется автоматизированный пуск посредством контакторов, которые в процессе пуска шунтируют элементы пускового реостата при переключении его ступеней.
Рассмотрим процесс пуска двигателя с применением пускового реостата на три ступени (Z=3). Контроль пуска обычно выполняется в функции тока. Ток, соответствующий моменту  называют током переключения. Значения пусковых токов обычно принимают (в зависимости от механизма и применяемого двигателя) равными:
называют током переключения. Значения пусковых токов обычно принимают (в зависимости от механизма и применяемого двигателя) равными:
 .
.
Для двигателей краново-металлургической серии значение пусковых токов может быть увеличено. Расчет пусковых ступеней может быть выполнен графически и аналитически.
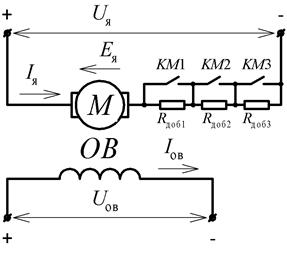
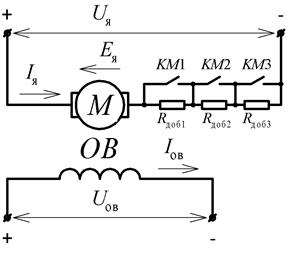 | 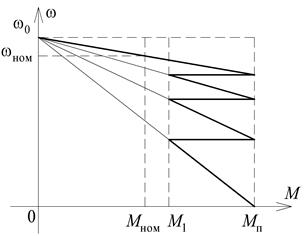 |
| Рис. 3.4. Схема включения пусковых сопротивлений | Рис. 3.5. Пусковая диаграмма ДПТ с НВ |
В относительных единицах, значения сопротивления ступеней можно рассчитать по отрезкам:
 , отсюда
, отсюда  ;
;
 , отсюда
, отсюда  ;
;
 , отсюда ,
, отсюда ,
где номинальное сопротивление двигателя
 .
.
Суммарное сопротивление реостата
 .
.
При расчете форсированного режима пуска обычно величину пускового тока принимают близкой или равной предельно-допустимому по паспортным данным, то есть
 .
.
В этом случае задаются числом ступеней пускового реостата Z и рассчитывают величину  , определяющую рациональное соотношение между токами
, определяющую рациональное соотношение между токами  и
и  :
:
 .
.
Затем рассчитывают значение тока переключений
 .
.
Если режим пуска нормальный, то задаются величиной тока переключений, а соотношение рассчитывают из соотношения
 .
.
После этого определяют начальный пусковой ток
 .
.
Расчет сопротивлений ступеней выполняют по формулам:
 ;
;  ;
;  .
.
Пример расчёта приведён в [4, с.55].
Дата добавления: 2017-11-21 ; просмотров: 2203 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Особенности пуска двигателя постоянного тока с независимым возбуждением
При включении в сеть ДПТ в начальный момент якорь неподвижен, а, следовательно,  . В этих условиях ток якоря (пусковой ток) ограничивается только электрическим сопротивлением обмоток и щеточных контактов в цепи якоря
. В этих условиях ток якоря (пусковой ток) ограничивается только электрическим сопротивлением обмоток и щеточных контактов в цепи якоря
 . (3.2)
. (3.2)
Так как величина сопротивления якоря мала, пусковой ток двигателя может в 10-40 раз превышать номинальный ток двигателя. Такое превышение начального пускового тока недопустимо, так как ведет к перегреву обмоток, появлению слишком большого пускового момента, который оказывает на якорь и подвижную часть электропривода ударное воздействие, что может привести к механическому повреждению движущихся частей электропривода. При больших значениях тока нарушаются нормальные условия коммутации, что может привести к повреждению коллектора.
Уменьшение пускового тока, как видно из (3.2), возможно двумя способами: снижением напряжения питающей сети или повышением сопротивления якорной цепи.
При введении в цепь якоря внешнего сопротивления начальный пусковой ток будет определяться выражением
 .
.
Таким образом, можно подобрать сопротивление резистора, при котором начальный пусковой ток  не превысит допустимого значения, который обычно составляет два номинальных значения
не превысит допустимого значения, который обычно составляет два номинальных значения  . Выбранное сопротивление, правда, удовлетворит только началу пуска, так как в обмотке якоря начнет индуцироваться ЭДС двигателя при вращении, величина которой пропорциональна скорости вращения.
. Выбранное сопротивление, правда, удовлетворит только началу пуска, так как в обмотке якоря начнет индуцироваться ЭДС двигателя при вращении, величина которой пропорциональна скорости вращения.
Чтобы поддерживать пусковой ток, а, следовательно, и пусковой момент на прежнем уровне, необходимо уменьшить сопротивление резистора. С этой целью в цепь якоря включают резистор переменного сопротивления, называемый пусковым реостатом со ступенчатой регулировкой сопротивления. В настоящее время ручной пуск применяется для управления крановыми двигателями, с целью создания пониженных скоростей подъема или спуска. На других механизмах, в основном, применяется автоматизированный пуск посредством контакторов, которые в процессе пуска шунтируют элементы пускового реостата при переключении его ступеней.
Рассмотрим процесс пуска двигателя с применением пускового реостата на три ступени (Z=3). Контроль пуска обычно выполняется в функции тока. Ток, соответствующий моменту  называют током переключения. Значения пусковых токов обычно принимают (в зависимости от механизма и применяемого двигателя) равными:
называют током переключения. Значения пусковых токов обычно принимают (в зависимости от механизма и применяемого двигателя) равными:
 .
.
Для двигателей краново-металлургической серии значение пусковых токов может быть увеличено. Расчет пусковых ступеней может быть выполнен графически и аналитически.
 | 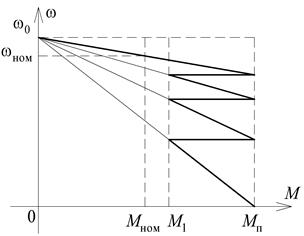 |
| Рис. 3.4. Схема включения пусковых сопротивлений | Рис. 3.5. Пусковая диаграмма ДПТ с НВ |
В относительных единицах, значения сопротивления ступеней можно рассчитать по отрезкам:
 , отсюда
, отсюда  ;
;
 , отсюда
, отсюда  ;
;
 , отсюда ,
, отсюда ,
где номинальное сопротивление двигателя
 .
.
Суммарное сопротивление реостата
 .
.
При расчете форсированного режима пуска обычно величину пускового тока принимают близкой или равной предельно-допустимому по паспортным данным, то есть
 .
.
В этом случае задаются числом ступеней пускового реостата Z и рассчитывают величину  , определяющую рациональное соотношение между токами
, определяющую рациональное соотношение между токами  и
и  :
:
 .
.
Затем рассчитывают значение тока переключений
 .
.
Если режим пуска нормальный, то задаются величиной тока переключений, а соотношение рассчитывают из соотношения
 .
.
После этого определяют начальный пусковой ток
 .
.
Расчет сопротивлений ступеней выполняют по формулам:
 ;
;  ;
;  .
.
Пример расчёта приведён в [4, с.55].
Дата добавления: 2016-12-26 ; просмотров: 1445 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
2.2.2. Пуск двигателя постоянного тока независимого возбуждения
В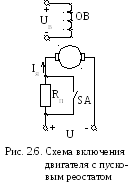 момент пуска двигателя (подключения якорной цепи к сети) ω = 0 и Е = 0. Из (2.1) получаем:
момент пуска двигателя (подключения якорной цепи к сети) ω = 0 и Е = 0. Из (2.1) получаем:
 .
.
Обычно RЯ очень мало, поэтому пусковой ток IЯП может в десятки раз превышать номинальный IЯН. В зависимости от типа и мощности двигателя пусковой ток ограничивают до IЯП = (2. 3) IЯН, включением в цепь якоря пускового реостата рис. 2.6. Определим сопротивление пускового реостата:
 .
.
В момент пуска двигателя выключатель SA разомкнут. Ток якоря течет через пусковой реостат. После разгона двигателя RП закорачивают, замыкая контакты SA.
2.3. Двигатель постоянного тока последовательного возбуждения (дпт-пв)
О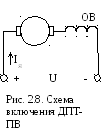 бмотки якоря и возбуждения такого двигателя включены последовательно рис. 2.7 и по ним протекает один и тот же токIЯ.
бмотки якоря и возбуждения такого двигателя включены последовательно рис. 2.7 и по ним протекает один и тот же токIЯ.
Предположим, что зависимость между потоком возбуждения и током, протекающим по ОВ – линейная:
 , (2.6)
, (2.6)
где α – коэффициент пропорциональности.
Подставим (2.6) в выражение момента (2.3) и выразим ток якоря:
 .
.
Подставим выражения (2.6) и (2.7) в (2.4), получим механическую характеристику двигателя с последовательным возбуждением:
 .
.
Выражение (2.8) показывает, что скорость вращения якоря обратно пропорциональна моменту на валу двигателя. Определим асимптоты механической характеристики.
При М → ∞;  .
.
П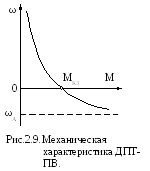 остроенная на рис. 2.9 характеристика имеет гиперболический характер. Чем меньше момент нагрузки на валу двигателя, тем больше скорость вращения вала двигателя. Поэтому, при работе двигателя на холостом ходу, скорость вращения вала может вырасти настолько, что центробежные силы вырвут якорные обмотки из пазов и двигатель выйдет из строя. Поэтому, такие двигатели без нагрузки включать не допускается.
остроенная на рис. 2.9 характеристика имеет гиперболический характер. Чем меньше момент нагрузки на валу двигателя, тем больше скорость вращения вала двигателя. Поэтому, при работе двигателя на холостом ходу, скорость вращения вала может вырасти настолько, что центробежные силы вырвут якорные обмотки из пазов и двигатель выйдет из строя. Поэтому, такие двигатели без нагрузки включать не допускается.
Пусковые режимы этот двигатель переносит хорошо, благодаря активному и индуктивному сопротивлению обмотки возбуждения, ограничивающей ток якоря. Направление вращения двигателя не зависит от полярности напряжения питания, т.к. направление тока меняется одновременно и в якорной цепи и в обмотке возбуждения. Поэтому некоторые двигатели с последовательным возбуждением работают и в цепях переменного тока, их называют универсальными.
2.4. Двигатели переменного тока
В настоящее время практически вся электрическая энергия вырабатывается в виде энергии переменного тока, соответственно и двигатели переменного тока получили самое широкой распространение. Но и среди них есть рекордсмены — это трехфазные асинхронные двигатели.
Более 90 % всех двигателей применяемых в промышленности, коммунальном и сельском хозяйстве – это трехфазные асинхронные двигатели (АД). Что объясняется простотой изготовления и эксплуатации, их низкой стоимостью и высокой надежностью в работе в сравнении с коллекторными двигателями постоянного тока.
Статор АД имеет трехфазную обмотку, соединяемую в звезду или треугольник, и обмотку ротора.
В зависимости от конструкции обмотки ротора различают АД с фазным ротором и АД с короткозамкнутым ротором.







