Характеристики двигателей последовательного возбуждения
В двигателе последовательного возбуждения, который иногда называют сериесным, обмотка возбуждения включена последовательно с обмоткой якоря (рис. 1). Для такого двигателя справедливо равенство Iв=Ia=I, следовательно, его магнитный поток Ф зависит от нагрузки Ф=f(Ia). В этом главная особенность двигателя последовательного возбуждения и она определяет его свойства.
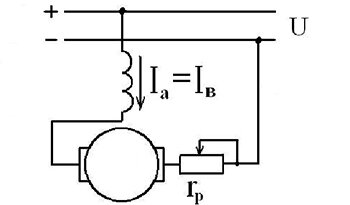
Рис. 1 — Схема электродвигателя последовательного возбуждения
Скоростная характеристика представляет зависимость n=f(Ia) при U=Uн. Она не может быть точно выражена аналитически во всем диапазоне изменения нагрузки от холостого хода до номинальной из-за отсутствия прямой пропорциональной зависимости между Ia и Ф. Приняв допущение Ф=кIa, запишем аналитическую зависимость скоростной характеристики в виде
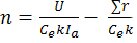
При увеличении тока нагрузки гиперболический характер скоростной характеристики нарушается и приближается к линейному, так как при насыщении магнитной цепи машины с увеличением тока Ia магнитный поток остается практически постоянным (рис. 2). Крутизна характеристики зависит от величины ?r.
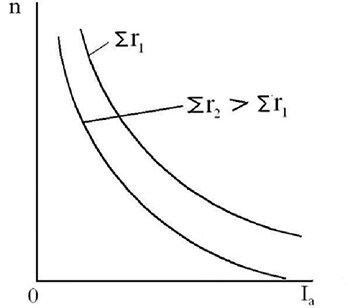
Рис. 2 — Скоростные характеристики двигателя последовательного возбуждения
Таким образом, скорость сериесного двигателя резко изменяется с изменением нагрузки и такая характеристика называется «мягкой».
При малых нагрузках (до 0,25 Iн) скорость двигателя последовательного возбуждения может возрасти до опасных пределов (двигатель идет «вразнос»), поэтому работа таких двигателей на холостом ходу не допускается.
Моментная характеристика — это зависимость M=f(Ia) при U=Uн. Если предположить, что магнитная цепь не насыщена, то Ф=кIa и, следовательно , имеем
Это уравнение квадратичной параболы.
Кривая моментной характеристики изображена на рисунке 3.8. По мере увеличения тока Ia магнитная система двигателя насыщается, и характеристика постепенно приближается к прямой.
Рис. 3 — Моментная характеристика двигателя последовательного возбуждения
Таким образом, электродвигатель последовательного возбуждения развивает момент, пропорциональный Ia 2 , что и определяет главное его преимущество. Так как при пуске Ia=(1,5..2)Iн, то двигатель последовательного возбуждения развивает значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения, поэтому он широко используется в условиях тяжелых пусков и при возможных перегрузках.
Механическая характеристика представляет собой зависимость n=f(M) при U=Uн. Аналитическое выражение этой характеристики может быть получено только в частном случае, когда магнитная цепь машины ненасыщенна и поток Ф пропорционален току якоря Ia. Тогда можно записать
Решая совместно уравнения , получаем
т.е. механическая характеристика двигателя последовательного возбуждения, также как и скоростная, имеет гиперболический характер (рис. 4).
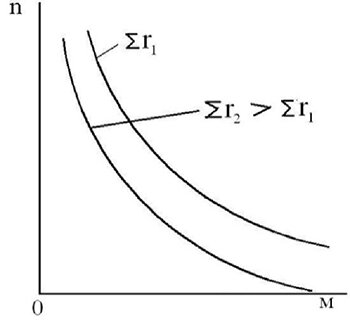
Рис. 4 — Механические характеристики двигателя последовательного возбуждения
Характеристика КПД двигателя последовательного возбуждения имеет обычный для электродвигателей вид (рис. 2 ).
Двигатели последовательного возбуждения
Схема двигателя. Схема двигателя последовательного возбуждения изображена на рис. 1.31. Ток, потребляемый двигателем из сети, протекает по якорю и обмотке возбуждения, соединенной с якорем последовательно. Поэтому I = Iя = Iв.
Также последовательно с якорем включен пусковой реостат Rп, который, как и у двигателя параллельного возбуждения, после выпуска выводится.
Уравнение механической характеристики. Уравнение механической характеристики может быть получено из формулы (1.6). При токах нагрузки, меньших (0,8 – 0,9) Iном, можно считать, что магнитная цепь двигателя не насыщена и магнитный поток Ф пропорционален току I : Ф = kI, где k = const. (При больших токах коэффициент k несколько уменьшается). Заменяя в (1.2) Ф, получаем М = См kI откуда
откуда
Iя =
Ф = . (1.10)
. (1.10)
Подставим Ф в (1.6):
n =  (1.11)
(1.11)
График, соответствующий (1.11), представлен на рис. 1.32 (кривая 1). При изменении момента нагрузки частота вращения двигателя резко изменяется – характеристики подобного типа называются «мягкими». При холостом ходе, когда М » 0, частота вращения двигателя безгранично возрастает и двигатель «идет вразнос». 
Ток, потребляемый двигателем последовательного возбуждения, при увеличении нагрузки растет в меньшей степени, чем у двигателя параллельного возбуждения. Это объясняется тем, что одновременно с ростом тока растет поток возбуждения и вращающий момент становится равным моменту нагрузки при меньшем токе. Эта особенность двигателя последовательного возбуждения используется там, где есть значительные механические перегрузки двигателя: на электрифицированном транспорте, в подъемно-транспортных механизмах и других устройствах.
Регулирование частоты вращения. Регулирование частоты вращения двигателей постоянного тока, как указывалось выше, возможно тремя способами.
Изменение возбуждения можно осуществить включением реостата Rр1 параллельно обмотке возбуждения (см. рис. 1.31) или включением реостата Rр2 параллельно якорю. При включении реостата Rр1 параллельно обмотке возбуждения магнитный поток Ф можно уменьшать от номинального до минимального Фmin. Частота вращения двигателя при этом будет увеличиваться (в формуле (1.11) уменьшается коэффициент k). Механические характеристики, соответствующие этому случаю, показаны на рис. 1.32, кривые 2, 3. При включении реостата параллельно якорю ток в обмотке возбуждения, магнитный поток и коэффициент k увеличиваются, а частота вращения двигателя уменьшается. Механические характеристики для этого случая изображены на рис. 1.32, кривые 4, 5. Однако регулирование вращения реостатом, включенном параллельно якорю, применяется редко, так как потери мощности в реостате и КПД двигателя уменьшается.
Изменение частоты вращения путем изменения сопротивления цепи якоря возможно при включении реостата Rр3 последовательно в цепь якоря (рис. 1.31). Реостат Rр3 увеличивает сопротивление цепи якоря, что ведет к уменьшению частоты вращения относительно естественной характеристики. (В (1.11) вместо Rя надо подставить Rя + Rр3.) Механические характеристики при этом способе регулирования представлены на рис. 1.32, кривые 6, 7. Подобное регулирование используется сравнительно редко из-за больших потерь в регулировочном реостате.
Наконец, регулирование частоты вращения изменением напряжения сети, как и в двигателях параллельного возбуждения, возможно только в сторону уменьшения частоты вращения при питании двигателя от отдельного генератора или управляемого выпрямителя. Механическая характеристика при этом способе регулирования изображена на рис. 1.32, кривая 8. При наличии двух двигателей, работающих на общую нагрузку, они с параллельного соединения могут переключаться на последовательное, напряжение U на каждом двигателе при этом уменьшается вдвое, соответственно уменьшается и частота вращения.
Тормозные режимы двигателя последовательного возбуждения. Режим генераторного торможения с отдачей энергии в сеть в двигателе последовательного возбуждения невозможен, так как получить частоту вращения n>nx не представляется возможным (nх =  ).
).
Режим торможения противовключением можно получить, так же как в двигателе параллельного возбуждения, путем переключения выводов обмотки якоря или обмотки возбуждения.
Двигатель последовательного возбуждения




![]()
![]()
Рис. 11
В двигателях последовательного возбуждения обмотка возбуждения включается последовательно с обмоткой якоря (рис. 11). Ток возбуждения двигателя здесь равен току якоря, что придает этим двигателям особые свойства.
Для двигателей последовательного возбуждения недопустим режим холостого хода. При отсутствии нагрузки на валу ток в якоре и создаваемый им магнитный поток будут небольшими и, как видно из равенства, частота вращения якоря достигает чрезмерно больших значений, что ведет к «разносу» двигателя. Поэтому пуск и работа двигателя без нагрузки или с нагрузкой менее 25% от номинальной недопустимы.
При небольших нагрузках  , когда магнитная цепь машины не насыщена (
, когда магнитная цепь машины не насыщена (  ), электромагнитный момент
), электромагнитный момент  пропорционален квадрату тока якоря.
пропорционален квадрату тока якоря.
В силу этого двигатель последовательного возбуждения имеет большой пусковой момент и хорошо справляется с тяжелыми условиями пуска.
С увеличением нагрузки магнитная цепь машины насыщается, и пропорциональность между и нарушается. При насыщении магнитной цепи поток практически постоянен, поэтому момент становится прямо пропорциональным току якоря.
С ростом момента нагрузки на валу ток двигателя и магнитный поток увеличиваются, а частота вращения уменьшается по закону, близкому к гиперболическому, что видно из уравнения (6).
 При значительных нагрузках, когда магнитная цепь машины насыщается, магнитный поток практически остается неизменным, и естественная механическая характеристика становится почти прямолинейной (рис.12, кривая 1). Такая механическая характеристика называется мягкой.
При значительных нагрузках, когда магнитная цепь машины насыщается, магнитный поток практически остается неизменным, и естественная механическая характеристика становится почти прямолинейной (рис.12, кривая 1). Такая механическая характеристика называется мягкой.
При введении пуско-регулировочного реостата в цепь якоря механическая характеристика смещается в область меньших скоростей (рис.12, кривая 2) и называется искусственной реостатной характеристикой.
Рис. 12
Регулирование частоты вращения двигателя последовательного возбуждения возможно тремя способами: изменением напряжения на якоре, сопротивления цепи якоря и магнитного потока. При этом регулирование частоты вращения изменением сопротивления цепи якоря производится так же, как и в двигателе параллельного возбуждения. Для регулирования частоты вращения изменением магнитного потока  параллельно обмотке возбуждения подключается реостат
параллельно обмотке возбуждения подключается реостат  (см. рис. 11),
(см. рис. 11),
При уменьшении сопротивления реостата  его ток увеличивается, а ток возбуждения уменьшается по формуле (8). Это приводит к уменьшению магнитного потока и росту частоты вращения (см. формулу 6).
его ток увеличивается, а ток возбуждения уменьшается по формуле (8). Это приводит к уменьшению магнитного потока и росту частоты вращения (см. формулу 6).
Уменьшение сопротивления реостата сопровождается уменьшением тока возбуждения, а значит, уменьшением магнитного потока и ростом частоты вращения. Механическая характеристика, соответствующая ослабленному магнитному потоку, изображена на рис. 12, кривая 3.
Рис. 13
На рис. 13 представлены рабочие характеристики двигателя последовательного возбуждения.
Пунктирные части характеристик относятся к тем нагрузкам, при которых не может быть допущена работа двигателя вследствие большой частоты вращения.
Двигатели постоянного тока с последовательным возбуждением применяются как тяговые на железнодорожном транспорте (электропоезда), в городском электрическом транспорте (трамваи, поезда метро) и в подъемно-транспортных механизмах.







