Особенности эксплуатации асинхронных двигателей
Главное меню
Судовые двигатели
В современной электроэнергетике почти повсеместно переменный ток вытесняет постоянный. Это объясняется многими преимуществами машин переменного тока в сравнении с машинами постоянного тока. В частности, у машин переменного тока вес, габариты и стоимость меньше, а к. п. д. выше; они проще в обслуживании, долговечнее и надежнее машин постоянного тока. Правда, электродвигатели переменного тока хуже поддаются регулировке, они развивают значительно меньшие пусковые моменты. Поэтому, если от электродвигателей требуются высокие регулировочные качества и повышенные пусковые моменты, применяют электродвигатели постоянного тока.
Привод механизмов портовых подъемно-транспортных машин чаще всего осуществляется асинхронными электродвигателями трехфазного переменного тока, получившими наибольшее распространение в электроэнергетике. Зависимости от исполнения ротора, различают асинхронные электродвигатели с короткозамкнутым ротором и с фазным ротором (с контактными кольцами). Принципиальная схема включения этих электродвигателей приведена на рис. 40..
Из курса электротехники известно, что принцип действия асинхронных электродвигателей основан на использовании так называемого вращающегося магнитного поля. При подаче трехфазного тока в обмотке статора создается магнитное поле, вращающееся со скоростью

где f— частота тока в обмотке статора;
р — число пар полюсов обмотки статора.
Эта скорость называется синхронной. Магнитное поле статора, (пересекая обмотку ротора, наводит в ней э. д. с., которая создает в цепи ротора ток. Последний, взаимодействуя с магнитным полем статора, образует вращающий момент, заставляющий ротор вращаться в ту же сторону, что и магнитное поле статора. При нормальной работе асинхронного электродвигателя его ротор вращается со скоростью п 2 1 . Если бы скорость вращения ротора была равна скорости, с которой вращается магнитное поле статора, то последнее относительно ротора было бы неподвижным. В этом случае э. д. с. и ток в обмотке ротора были бы равны нулю и никакого вращающего момента не возникло бы.

Величиной, характеризующей работу асинхронного электродвигателя, является скольжение s :

где n 1 —синхронная скорость;
n 2 — скорость вращения ротора.
Зная скольжение, нетрудно определить скорость вращения электродвигателя

При работе электродвигателя без нагрузки скорость его близка к синхронной, а скольжение очень мало.
Двигательный режим асинхронного электродвигателя имеет место при скольжениях, изменяющихся в пределах от 0 до 1, при этом число оборотов ротора изменяется от n 1 до 0. Номинальная величина скольжения асинхронного электродвигателя составляет 0,03—0,1, причем первая цифра относится к более мощным, а вторая — к менее мощным электродвигателям (до 10—20 квт).
Очевидно, s = 0 в том случае, когда ротор вращается с синхронной скоростью n 1 . Можно считать, что на холостом ходу электродвигателя его ротор вращается с этой скоростью, если не учитывается трение.
Величина скольжения s =1, когда ротор электродвигателя не вращается при включенной обмотке статора. Этот режим называют режимом короткого замыкания электродвигателя (или режимом стоянки под током). Получить режим короткого замыкания можно, искусственно затормозив ротор или перегрузив электродвигатель до полной остановки его. Пуск асинхронного электродвигателя также начинается именно с этого режима.
Выражение (81) показывает, что скольжение может изменяться гораздо в больших пределах, чем указано выше. Действительно, ротор электродвигателя под действием постороннего источника механической энергии (например, под действием опускающегося груза) может вращаться со скоростью больше синхронной. В этом случае скольжение будет отрицательным (s 2 >n 1 .
Можно также представить, что ротор электродвигателя под действием опускающегося груза вращается в направлении, противоположном направлению вращения магнитного поля статора. В этом случае s>1, так как в выражение (81) величину п 2 нужно подставить с отрицательным знаком. Такой режим называется режимом противовключения.
Таким образом, теоретически скольжение асинхронного электродвигателя может изменяться в пределах от —? до + ?. Практически же скольжение асинхронного электродвигателя при работе последнего в двигательном и тормозных режима« изменяется в пределах от —2 до +2.
Из курса электрических машин известно, что для асинхронного электродвигателя может быть составлена схема замещения, с помощью которой производится анализ работы электродвигателя и исследуются режимы его работы. На рис. 41 приведена упрощенная схема замещения асинхронного электродвигателя, в которой приняты следующие обозначения:
U 1 — фазное напряжение обмотки статора, в;
I 1 — фазный ток обмотки статора, а;
I 0 — фазный ток холостого хода электродвигателя, а;
I 2 — приведенный фазный ток обмотки ротора, а;
r 1 и х 1 — активное и индуктивное сопротивления фазы обмотки статора, ом;
r 2 ’ и х 2 ‘ — приведенные активное и индуктивное сопротивления фазы обмотки ротора, ом.
Для приведенных величин могут быть выведены следующие соотношения:

где т 1 и т 2 — число фаз обмоток статора и ротора;
к = U 1н / E 2н — коэффициент трансформации э. д. с. (U 1н — номинальное фазное напряжение обмотки статора; E 2н — фазная э. д. с. обмотки ротора при разомкнутых контактных кольцах).

Мощность Р 1 забираемая электродвигателем из сети, определяется напряжением сети U 1 , током статора I 1 зависящим от нагрузки, и коэффициентом мощности cos? т.е.

Мощность на валу электродвигателя зависит от его к. п. д.? и может быть вычислена по формуле

Если пренебречь механическими и вентиляционными потерями, которые незначительны, то можно считать, что механическая мощность асинхронного электродвигателя (мощность на валу) равна, потерям мощности в сопротивлении  схемы замещения, приведенной на рис. 41, т. е.
схемы замещения, приведенной на рис. 41, т. е.

где т 2 = т 1 — приведенное число фаз обмотки ротора.
Между токами асинхронного электродвигателя, согласно схеме замещения, существует зависимость

Ток статора асинхронных электродвигателей I 1 очень велик даже при отсутствии нагрузки на валу. Это объясняется тем, что намагничивающий ток этих электродвигателей составляет 50—70% номинального тока статора.
Эксплуатация асинхронных электродвигателей с фазным ротором
Назначение асинхронных двигателей, с фазным ротором.
Асинхронный двигатель с фазным ротором применяют для привода таких машин и механизмов, которые пускаются в ход под нагрузкой (краны, лифты и пр.). В подобных приводах двигатель должен развивать при пуске максимальный момент, что достигается с помощью пускового реостата.
Конструктивные особенности асинхронного двигателя с фазным ротором.
Как и у АД с короткозамкнутым ротором, сердечник его статора набирается из листов электротехнической стали, а затем спрессовывается. В пазы сердечника укладываются фазные обмотки, концы которых затем выводятся в коробку, расположенную на корпусе двигателя.
Отличие заключается в роторе двигателя. Он также как и статор набирается из листов стали, спрессовывается и в него набирается фазная обмотка. Причем число фаз ротора равно числу фаз статора, в то время как у короткозамкнутого, каждый стержень “беличьей клетки” образует отдельную фазу. Отсюда название – фазный ротор.
Концы фаз фазного ротора соединяются с контактными кольцами, которые расположены на валу ротора. В свою очередь, контактные кольца соприкасаются с графитовыми щетками, которые имеют выводы в коробку на корпусе, для возможности подключения дополнительного сопротивления. Это сопротивление в цепи ротора оказывает влияние на токи, протекающие в нем, а как следствие на его характеристики. При увеличении сопротивления цепи ротора, механическая характеристика становится более мягкой.
Обмотку фазного ротора обычно соединяют «звездой». Концы ее присоединяют к трем контактным кольцам, к которым посредством щеток подключают трехфазный пусковой реостат, т. е. в каждую фазу ротора в момент пуска вводят дополнительное активное сопротивление.
Для уменьшения износа контактных колец и щеток двигатели с фазным ротором иногда снабжают приспособлениями для подъема щеток и замыкания колец накоротко после выключения реостата.
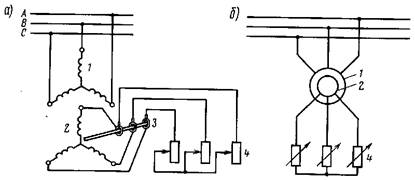
Электрическая схема асинхронного двигателя с фазным ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор; 3 — контактные кольца со щетками; 4 — пусковой реостат
Эксплуатация асинхронных электродвигателей с фазным ротором.
При эксплуатации асинхронных электродвигателей существует целый ряд правил и требований, предъявляемых к ним с точки зрения техники безопасности.
Прежде всего необходимо отметить наиболее характерные ситуации, при которых требуется немедленное (аварийное) отключение электродвигателя от сети:
-угроза несчастного случая или несчастный случай с человеком, требующие немедленной остановки двигателя;
-наличие дыма или огня из двигателя или его пускорегулирующей аппаратуры;
-вибрации сверх допустимых норм, угрожающие целости двигателя;
-поломка приводимого механизма;
-нагрев подшипников сверх допустимой температуры, указанной в инструкции завода—изготовителя двигателя.
Для предотвращения поражения электрическим током обслуживающего персонала выводы статорной и роторной обмотки должны быть закрыты ограждениями, снятие которых требует отвертывания гаек или вывинчивания винтов. Вращающиеся части машин также должны быть закрыты ограждениями, снятие которых во время работы двигателей строго воспрещается.
В тех производствах, где возможна систематическая перегрузка электродвигателей по технологическим причинам, необходима установка защиты от перегрузки. Эта защита должна воздействовать на аварийную сигнализацию, на управляющие органы с целью разгрузки механизма или на пусковую аппаратуру для отключения двигателя.
Асинхронные двигатели должны иметь защиту от коротких замыканий с помощью автоматического выключателя либо предохранителей с плавкими вставками. Уставки автоматов и номинальный ток плавких вставок выбираются так, чтобы не допускать ложного срабатывания защиты при пусковых токах.
Частотный пуск.
Применяется для плавного пуска и остановки двигателя, а так же для управления скоростью вращения.
Вывод: в ходе проделанной работы я изучил общие вопросы эксплуатации высоковольтных асинхронных двигателей, с фазным ротором.
Особенности эксплуатации асинхронных двигателей
Т.е. мощность электрических потерь в роторе пропорциональна скольжению
Основным энергетическим показателем машины является коэффициент полезного действия
P2-полезная мощность двигателя
P1-затраченная (полная) мощность (Р1= Рэ для двигателя–мощность потребления электрической энергии),
В асинхронных двигателях η =75-95%
Бесконтактность асинхронных машин и их конструктивная простота обусловливают их высокую надежность, которая определяется в основном надежностью шарикоподшипников. Заданная интенсивность отказов в течение срока службы асинхронного двигателя может быть обеспечена соответствующим выбором шарикоподшипников.
Наибольшее распространение в настоящее время получили авиационные трехфазные двигатели серии МТ (мотор трехфазный). Двигатели этой серии имеют закрытое или защищенное конструктивное исполнение с корпусом и подшипниковыми щитами из алюминиевого сплава. Их охлаждение осуществляется либо путем аксиальной самовентиляции (двигатели защищенного исполнения), либо путем внешней самовентиляции за счет обдува внешней ребристой поверхности корпуса (двигатели закрытого исполнения).
Двигатели, используемые в системах перекачки топлива, гидросмеси, масла и т.п., имеют, как правило, герметичное конструктивное исполнение (например, двигатели серии МГТ). Их охлаждение осуществляется путем теплоотдачи от ребристого или гладкого корпуса охлаждающей жидкости (топливо, масло, гидросмесь и т.д.).
Для уменьшения массы и габаритов авиационные асинхронные двигатели выполняются с малым числом пар полюсов (р=2; 3; 4). При этом синхронная частота вращения поля составляет соответственно n1=12000; 8000; 6000 об/мин.
В некоторых случаях (гироскопические двигатели) асинхронную машину выполняют с одной парой полюсов, что соответствует n1=24000об/мин.
Мощность авиационных асинхронных двигателей колеблется от нескольких ватт до десятков киловатт. Наиболее мощные двигатели нашли применение в качестве привода топливных насосов, например, двигатель АДС-35000, имеющий мощность 35 кВт.
Особенностью авиационных асинхронных двигателей является также сравнительно низкая величина номинального коэффициента мощности cosφ=0,5-0,8. Меньшие величины cosφ соответствуют двигателям меньшей мощности. При работе со скольжениями, близкими к единице, коэффициент мощности становится значительно меньше номинального, что следует учитывать, например, при запуске асинхронного двигателя от источника питания соизмеримой мощности.
Характерные неисправности асинхронных машин, вероятные причины и способы устранения приведены в таблице 2.1.
Все эти признаки могут являться контрольными параметрами при проведении регламентных работ в процессе эксплуатации, а также при ремонте асинхронных машин.
Интенсивность отказов асинхронных двигателей, характеризующая надежность их работы, составляет следующую приближенно: (0,008…0,1)·10 –4 . Такая высокая надежность, обусловленная простотой конструкции асинхронных машин, может быть обеспечена только при выполнении ряда общих и специальных эксплуатационных требований.
| N п/п | Неисправность | Причины | Способы устранения |
| 1. | Двигатель под нагрузкой не разгоняется в ход или останавливается | а) обрыв в проводах питающей сети или в фазах статорной обмотки; б) износ подшипников и прилипание ротора к статору; в) неправильное электрическое соединение обмоток статора в «звезду» вместо «треугольник», что снижает величину пускового момента в три раза. | а) устранить обрыв; б) заменить подшипники; в) проверить соединение обмоток статора. |
| 2. | Повышенный нагрев отдельных частей | а) перегрузка двигателя; б) отклонение напряжения сети от номинального; в) наличие межвитковых замыканий в обмотке статора; г) износ подшипников, отсутствие их смазки или неисправность системы охлаждения. | а) проверить величину нагрузки; б) проверить питание; в) устранить межвитковые замыкания; г) проверить состояние подшипников и их смазку. |
| 3. | Дрожание машины при работе. | Нарушение балансировки ротора, искривлением вала, износом подшипников и т.д. | Проверить балансировку ротора, износ подшипников. |
| 4. | Сильный шум при работе машины. | Причины как механической, так и электромагнитной природы. | Исключив механические причины, проверить питание. |
Способы регулирования скорости вращения асинхронного двигателя:
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет







