МАШИНЫ ПЕРЕМЕННОГО ТОКА




![]()
![]()
6.1 Общее устройство машин переменного тока
Машинами переменного тока (МПрТ) называются устройства, преобразующие электрическую энергию переменного тока в механическую и наоборот. Как и машины постоянного тока (МПТ), они обладают принципом обратимости и также имеют подвижную и неподвижную части. Подвижная часть называется р о т о р о м, а неподвижная с т а т о р о м.
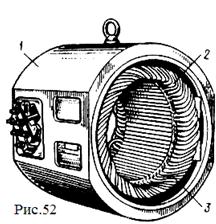
В отличие от МПТ, в машинах переменного тока наиболее важным узлом является неподвижная часть, т.е. статор (рис.52). Это объясняется тем, что именно в обмотке статора наводится ЭДС. В генераторе она создает напряжение на клеммах машины, а в двигателе определяет величину поступающего тока и и его механические характеристики.
Так же как в якоре МПТ, она размещается в пазах статора. Статор состоит из корпуса (1), сердечника (2) и обмотки (3). Обмотка машин переменного тока является 3-х фазной и это обстоятельство является главной особенностью машин переменного тока. Дело в том, что за счет сдвига фаз токов друг относительно друга на 120 0 , и пространственного разнесения катушек в полости статора также на 120 0 , удается создать вращающееся магнитное поле. Этот факт иллюстрируется на рис.53.
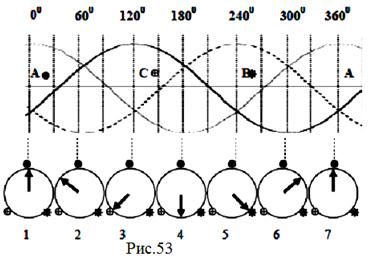
На нем представлены колебания 3-х токов в катушках А, В, С , пространственное положение которых в статоре отмечено тремя метками на нижних круговых диаграммах. Указанные катушки изображены на окружностях в порядке следования по часовой стрелке вдоль каждой из семи окружностей, символизирующих внутреннюю полость статора. Черная стрелка в каждой окружности изображает суммарное магнитное поле созданное этими катушками. Так, при 0 0 , суммарное магнитное поле направлено вверх , к катушке А (ток в ней положителен). При 60 0 , т.е. спустя некоторое время, наибольший ток — отрицательного знака — возникает в катушке В и суммарное магнитное поле становится направленным от катушки В, которая находится в правой нижней части окружности статора). При 120 0 , наибольшее значение — положительное — приобретает ток в катушке С и суммарное магнитное поле оказывается направленным к катушке С, находящейся в нижней левой части окружности-статора и т.д. Важным моментом в рассматриваемом изменении ориентации магнитного поля является то, что оно остается п о с т о я н н ы м п о м о д у л ю . То есть колебания 3-х токов в обмотках статора приводят к равномерному вращению постоянного по величине магнитного поля в полости статора.
Получающееся магнитное поле (N-S) совершает один полный оборот за один период колебаний. Как известно, промышленный 3-х фазный ток имеет частоту 50 Гц, — следовательно скорость вращения магнитного поля в полости статора МПрТ составляет 50х60 = 3000 об/мин. В силу обратимости машин переменного тока справеливо и обратное утверждение: для создания трехфазного тока с частотой переменного тока 50 Гц, в машине с 3-мя катушками, скорость вращения магнитного поля (N-S) – т.е. ротора c одной парой полюсов — должна составлять 3000 об/мин. Это значение скорости является максимальным для серийных машин переменного тока, однако не единственно возможным.
Действительно, если вместо 3-х катушек в полости статора разместить 6 катушек в порядке чередования «А-В-С-А-В-С», то за один период колебания тока в каждой фазе вектор индукции суммарного магнитного поля повернется только на 180 0 , а скорость вращения поля снизится до 1500 об/мин. При этом ротор такой машины должен иметь 2 пары полюсов «N-S-N-S», так как по истечению полного периода колебаний тока, и повороте ротора на 180 0 , ориентация полюсов должна приобрести первоначальную конфигурацию. Это возможно только, если одноименные полюса ротора также находятся под углом 180 0 , а разноименные — под углом 90 0 .
В результате при 3-х кратном увеличении числа катушек, можно получить все меньшие скорости вращения:
| Число катушек |
| Скор. вращ.(об/мин) |
| Чсло полюсов |
Такую зависимость используют для создания двигателей и генераторов с пониженными скоростями вращения. В частности, на больших электростанциях (АЭС, ГЭС) используются очень мощные и массивные машины переменного тока. Так, масса ротора генератора Саяно-Шушенской ГЭС достигает 900 тонн, а диаметр –свыше 10 метров (10,3 м). Такой ротор ни при каких условиях не может вращаться со скоростью 3000 об/мин. — его внешние края должны были бы иметь скорость в несколько раз большую скорости сверхзвукового истребителя. Чтобы сделать скорость вращения ротора приемлемой для такого массивного устройства — например 50 об/мин для выработки тока частотой 50 Гц — на статоре генератора необходимо разместить n = 3*(3000/50) = 180 катушек, а ротор должен иметь р = 180/3 = 60 пар полюсов. Так, ротор генератора Саяно-Шушенской ГЭС имеет 42 полюса и скорость вращения 3000/21= 142,8 об/мин.

Несмотря на большое количество катушек, у статора любой МПрТ всего 6 выводных клемм. Это значит, что все катушки объединяются в 3 однофазных группы, а в каждой группе (фазе) они соединяются либо параллельно либо последовательно. Стороны катушек укладываются в пазы, а расстояния между сторонами выбирается таким образом, чтобы они оказались под соседними противоположными полюсами ротора. Это приводит к тому что ЭДС, наводимые на противоположных сторонах каждой катушки складываются друг с другом. Реальная технология создания обмоток статоров машин переменного тока достаточно сложна и разнообразна. Поэтому в рамках отведенного программой количества учебных часов, мы больше не будем на этом останавливаться.
Что касается роторов МПрТ, то их конструкция задается типом машины переменного тока, который, в свою очередь, определяется характером поведения ротора по отношению к вращающемуся магнитному полю статора. А именно, существует два типа машин: а) с и н х р о н н ы е машины; б) а с и н х р о н н ые машины.
В синхронных машинах ротор имеет такую же скорость вращения, как и магнитное поле (отсюда и их название). В асинхронных машинах скорость вращения ротора не совпадает со скоростью вращения магнитного поля. Если она меньше скорости вращения поля, то машина работает как двигатель, если выше — как генератор.
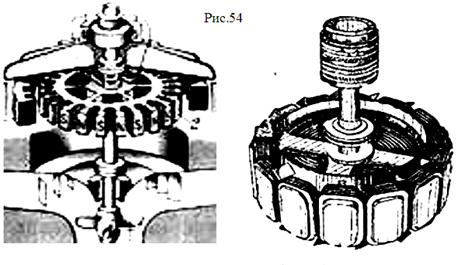
Синхронные машины используются на практике и как генераторы и как двигатели. В частности, все промышленные генераторы электроэнергии на ГЭС, АЭС, ТЭЦ являются синхронными. Асинхронные машины , в основном, используются как двигатели и получили чрезвычайно широкое распространение благодаря простоте своей конструкции. Именно в силу последнего обстоятельства асинхронные двигатели будут рассмотрены более подробно. На нижних рисунках представлены роторы синхронных генераторов ( рис.54) и асинхронных двигателей (рис.56).
6.2 Асинхронные двигатели
Асинхронные двигатели (АД, рис.55) получили широкое распространение в различных отраслях промышленности и бытовых приборах благодаря простоте конструкции. Они широко применяются в приводах металлообрабатывающих, деревообрабатывающих станков, кузнечно-прессовых, ткацких, швейных, грузоподъемных, землеройных машин, вентиляторов, насосов, компрессоров, центрифуг, в ручном электроинструменте.
Асинхронные двигатели выпускаются в двух исполнениях: а) с короткозамкнутым ротором (КР); б) с фазным ротором (ФР). Именно первый тип двигателей получил наибольшее распространение. Двигатели с фазным ротором используются реже вследствие относительной сложности и дороговизны конструкции. Однако они обладают лучшими пусковыми и регулировочными характеристиками и их применяют для привода конвейеров, подъемников, крановых конструкций, различных промышленных мельниц (угольных, цементных и т. д.), вентиляционных систем, а также технических средств, рассчитанным на длительное время непрерывной работы. Ниже рассматривается принцип работы АД с короткозамкнутым ротором, который, в целом сохраняется и в машинах с фазным ротором.
Корпус АД с КР отливают из алюминиевого сплава или из чугуна, либо делают сварным. Обычно поверхность корпуса имеет ряд продольных ребер ( рис.55) увеличивающих охлаждение двигателя. В отличие от синхронных машин, роторы которых имеют собственные магнитные полюса (рис.54), роторы асинхронных двигателей их не имеют (рис.56). Это объясняется тем, что магнитное поле роторов асинхронных двигателей является не собственным, а н а в е д е н н ы м. Основным узлом КР является система из медных или алюминиевых стержней , стянутых между собой торцевыми кольцами и образующих конструкцию типа «беличье колесо» (рис.56, «в»). Эта конструкция образует о б м о т к у р о т о р а, которая имеет тот же смысл, что и вторичная обмотка трансформатора. Обмотка заключается в ферромагнитный сердечник — тело ротора (рис.56, «а», «б»). Сердечник набирается из пластин электротехнической стали и выполняет функцию участка магнитопровода — остальной магнитопровод включает в себя и сердечник статора. В результате вся машина состоит из магнитопровода и двух его обмоток — обмотки статора и обмотки ротора. Это означает, что двигатель, с достаточной степенью корректности можно рассматривать как разновидность трансформатора.
Последнее обстоятельство проявляется в использовании конструкции асинхронного двигателя (в варианте с фазным ротором) в качестве трансформатора, который называется и н д у к ц и о н н ы м р е г у л я т о р о м напряжения. Такой трансформатор обеспечивает плавное изменение напряжения в обмотке ротора при плавном его повороте относительно неподвижной обмотки статора на заданный угол — при этом сам ротор не вращается.
Асинхронный двигатель с КР работает следующим образом:
1) при подаче 3-х фазного напряжения в обмотку статора, в его катушках появляется ток, который порождает вращающееся магнитное поле (см.выше);
2) магнитное поле, пересекая «беличье колесо» обмотки ротора, наводит в ней по закону электромагнитной индукции вихревую электрическую ЭДС, которая, в свою очередь, наводит в его стержнях ток и магнитное поле.
3) магнитное поле ротора взаимодействуя с бегущим магнитным полем статора, создает на роторе вращающий момент и увлекает его за вращающимся полем статора.
При любом положении и скорости ротора, его магнитное поле всегда «бежит» за магнитным полем статора с такой же скоростью. Это означает, что полюса ротора никаким образом не привязаны к самому ротору и непрерывно меняют по отношению к нему свою ориентацию. Поэтому для выражения степени отличия скорости вращения ротора , n, от скорости вращения магнитного поля статора, n0, вводится понятие коэффициента скольжения,s:

Если ротор неподвижен, то n=0 и s=1; если ротор достиг скорости вращения магнитного поля, то n= n0 и s=0. Следовательно для всех возможных скоростей вращения ротора справедливо неравенство: 0 Режим пуска
В этом режиме принципиальным моментом является неподвижность ротора (s=1) — магнитное поле статора имеет относительно него очень высокую скорость вращения и создает большую ЭДС. Эта ЭДС создает, в свою очередь, в роторе большой ток, чье магнитное поле, пересекая с такой же скоростью собственные неподвижные стержни, создает большую ЭДС самоиндукции. Все это приводит к сдвигу фаз между ЭДС в роторе и его током близкому к 90 0 . Другими словами, ротор в момент пуска имеет большое индуктивное сопротивление.
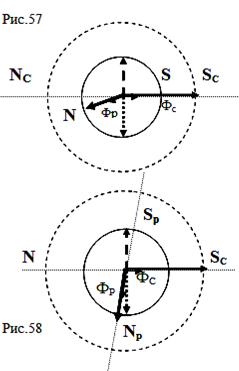
На рис. 57 представлена упрощенная фазовая диаграмма электрических параметров АД в момент пуска. Основным параметром диаграм-мы является магнитный поток статора Фс, отложенный в горизонтальном положении. По часовой стрелке относительно него (вертикально вверх) отложен вектор сетевого напряжения, который должен опережать ток статора и созданный им магнитный поток Фс, на 90 0 , поскольку обмотка статора является индуктивным элементом цепи. Против часовой стрелки (вертикально вниз) отложен вектор ЭДС обмотки ротора, которая всегда отстает от создающего его магнитного потока на 90 0 ( ЭДС обмотки статора, ради упрощения, не приведена). Так как ток обмотки ротора, в свою очередь, отстает от своей ЭДС еще на угол, близкий к 90 0 , то общая ориентация магнитных потоков на диаграмме ФР и Фс в фазовом выражении оказывается близкой к 180 0 . На диаграмме их вектора оказываются ориентироваанными в противоположном направлении.
С другой стороны, фазовые сдвиги векторов на векторных диаграммах должны повторять фазовые сдвиги между параметрами и в реальном пространстве, если последние определены в нем материально. Магнитные потоки, в отличие от токов и напряжений, осуществляют в нем реальное вращения и регистрирующие приборы должны фиксировать между ними те же фазовые сдвиги, что и на векторных диаграммах. Это, в частности, означает, что магнитные потоки в момент пуска вращаются в полости статора под углами близкими к 180 0 — с такой ориентацией полюсов, как показано на рис.57. ( круг со сплошной линией обозначает ротор, а с пунктирной — статор). В частности, из этого следует что в момент пуска, магнитные полюса ротора оказываются под магнитными полюсами статора. Это означает, что силовое взаимодействие между ними имеет в основном радиальный характер. Реальное же вращение создают только касательные взаимодействия, которые , как следует из рисунка, могут быть недостаточно сильными (если полюса находятся точно друг под другом, то касательные взаимодействия вообще пропадают). Это приводит к выводу, подтверждающемуся опытом: асинхронные двигатели с короткозамкнутым ротором обладают слабым пусковым моментом.
Это серьезный недостаток АД, который привел на практике к их вытеснению из ряда практических приложений и замене двигателями постоянного тока, чьи пусковые характеристики существенно лучше. Другим следствием этого недостатка явилось появление асинхронных двигателей с фазным ротором, в которых указанный недостаток преодолевается переходом от короткозамкнутой обмотки к разомкнутой — фазной. Фазная обмотка конструктивно повторяет обмотку статора и в момент пуска замыкается на внешние сопротивления. Появление в обмотке ротора дополнительных сопротивлений меняет взаимную ориентацию магнитных полей (см.далее) статора и ротора в момент пуска — а именно: благодаря сопротивлениям, магнитные полюса ротора выводятся из под магнитных полюсов статора и касательная составляющая их взаимодействия резко увеличивается. Недостатком АД с фазным роторм является их удорожание и усложнение обслуживания; в частности, реостаты после пуска должны выводится из цепи ротора , а обмотка шунтироваться накоротко.
Режим пуска АД с короткозамкнутым ротором имеет и другой существенный недостаток — большие значения тока в момент включения двигателя в обмотке статора. Эти значения могут превышать номинальные, т.е. рабочие, в 5 – 15 раз. В сочетании со слабым пусковым моментом это может привести к выходу из строя двигателя в момент пуска.
Причина этого заключается в уже установленной противофазности магнитного поля ротора и статора. Так как пространственно при пуске они направлены встречно, то суммарное магнитное поле должно существенно снизиться по сравнению с первоначальным магнитным полем статора. Это незамедлительно должно привести к уменьшению ЭДС в обмотке статора, — которая, как следует из векторной диаграммы, в основном, и противостоит сетевому напряжению, — и увеличить ток в двигатель. Именно это и происходит на практике: резкое увеличение тока в статоре восстанавливает суммарное магнитное поле двигателя до первоначального значения.
Вообще, поскольку в момент пуска ротор не вращается, вся магнито-электрическая система АД по всем процессам практически точно воспроизводит процессы в трансформаторе и он сам, в этот момент, является трансформатором. В частности, в трансформаторе возникает такое же взаимное подавление магнитных потоков первичной и вторичной обмоток ( см. «Трансформаторы») и многократное увеличение рабочего тока — по сравнению с током холостого режима — в первичной обмотке при замыкании вторичной на внешнюю нагрузку. Увеличение пускового тока АД в момент пуска создает опасность для целостности обмотки статора и требует на практике дополнительных мер безопасности — например, включение в цепь АД ограничивающих пусковых реостатов.
В. Режим холостого хода
Этот режим характеризуется отсутствием нагрузки на валу двигателя и, как следствие, высокой скоростью вращения ротора. Коэффициент скольжения при этом находится в пределах 0,02 ≤ s ≤ 0,05. Это значит, что относительная скорость вращения (перемещения) ротора и статора очень мала, а следовательно, будет малой и ЭДС, наводимая магнитным полем статора в обмотках ротора.
Малость ЭДС ведет к двум следствиям: а) незначительности тока и магнитного поля ротора; б) незначительности индуктивного сопротивления обмотки ротора, хL≈ 0.
Первое следствие означает небольшую величину взаимодействия магнитных полей ротора и статора и малость вращающего момента – его величины хватает только на то, чтобы, преодолевая незначительные силы трения в подшипниках ротора, поддерживать на постоянном уровне скорость его вращения.
Второе следствие означает п е р п е н д и к у л я р н у ю ориентацию магнитных полей ротора и статора (рис.58). Действительно, на фазовой диаграмме в этом режиме вектор тока ротора, а следовательно и его магнитного потока, будет почти совпадать по фазе с вектором ЭДС обмотки ротора. Это связано с тем что сопротивление ротора будет иметь почти активный характер:

Перпендикулярность магнитных полей значительно увеличивает касательную составляющую взаимодействия, однако в режиме х/х это обстоятельство никак себя не проявляет из-за незначительной величины магнитного поля ротора. Зато это прямым образом влияет на величину тока в обмотке статора: он становится очень малым ( 3-5% от номинального). Причина этого очевидна: магнитное поле статора не встречает противодействия со стороны магнитного поля ротора и создает противоэдс сетевому напряжению даже при незначительном токе в обмотке статора. Эта ситуация воспроизводит режим работы трансформатора при разомкнутой вторичной обмотке.
Тот факт, что перпен-дикулярная ориентация маг-нитных полей ротора и стато-ра значительно увеличивает касательные взаимодействия и, тем самым, — вращающий мо-мент — используется в АД с фазным ротором. Замыкая ра-зомкнутую обмотку ротора на внешние сопротивления, тем самым резко увеличивают акти-вную составляющую ее полного сопротивления. В результате фаза тока становится близкой к фазе ЭДС, а магнитное поле ротора разворачивается пер-пендикулярно магнитному полю статора. Это увеличивает касательные взаимодействие и делает пусковой момент двигателя весьма большим.
С. Рабочий режим
Рабочий режим АД является промежуточным между рассмотренными выше режимами. Действительно, появление нагрузки означает возникновение на валу двигателя тормозного момента и замедление скорости вращения ротора. Это означает, что векторная диаграмма холостого хода должна плавно трансформироваться в векторную диаграмму режима пуска. Легко понять, что это должно проявляться:
а) в изменении угла ориентации магнитных полей ротора и статора от 90 0 до 180 0 ;
б) в увеличении магнитного поля ротора от минимального значения при х/х до максимального значения при пуске.
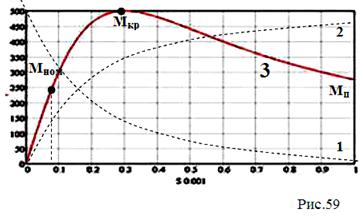
На рис.59 представлены графики зависимости вращающего момента АД и его составляющих от скорости вращения ротора. Кривая 1 описывает поведение касательной составляющей взаимодействия, которая уменьшается с замедлением скорости вращения ротора. Кривая 2 отображает поведение самих сил взаимодействия по модулю, в частности их увеличение с замедлением вращения ротора. В итоге полный вращающий момент двигателя приобретает «колоколообразную» форму (рис.59, «3»).
Зависимость вращающего момента , М вр, от скорости вращения ротора (чаще: от коэффициента скольжения, s) называют механической характеристикой (МХ) асинхронного двигателя.
Нетрудно видеть, что МХ довольно сильно отличается от соответству-ющих характеристик двигателей постоянного тока (рис.51 «а»; «б»). Принципиальным отличием является наличие на ней н и с п а д а ю щ е г о участка, означающего снижение крутящего момента при замедлении скорости вращения ротора двигателя. Этот факт означает, что при превышении противодействующим моментомзначения Мкр – максимального вращающего момента, который может развить двигатель — скорость вращения двигателя упадет до нуля, т.е. до s = 1, и двигатель — если момент не убрать — остановится. Указанный фактор для ряда приложений является неприемлемым, что ограничило диапазон применения двигателей с короткозамкнутым ротором.
Нормальный рабочий режим двигателя осуществляется при Мном. На практике он в 2-3 раза меньше максимальноого момента Мкр.







