Cхема замещения асинхронного электродвигателя
Трехфазные асинхронные электродвигатели, или как их еще называют индукционные электродвигатели, являются наиболее распространенными в промышленности. Данный тип электродвигателя, аналогично машинам постоянного тока тоже обладают свойствами обратимости, и может работать как в двигательном, генераторном, так и в тормозных режимах – противовключение, динамическое торможение. Режим работы асинхронного электродвигателя характеризуют знаком и величиной скольжения.
Пожалуй, основным методом анализа установившихся режимов индукционного электродвигателя является использование эквивалентных схем замещения. В таком случае обычно рассматривают явление, которое относится к одной фазе многофазного двигателя при соединении его обмоток звездой.
Упрощенная картина магнитных потоков работающего асинхронного электродвигателя позволяет представить его в виде эквивалентной схемы:

Электромагнитная связь первичной и вторичной цепи осуществляется потоком взаимоиндукции Ф, индуктирующим в роторной обмотке ЭДС Е2S. Сопротивление индуктивное первичной цепи Х1 обусловлено наличием потока рассеивания, связанного только с этой цепью. Аналогично сопротивления Х2 обусловлено потоком рассеивания Ф25.
Частота тока ротора будет определяться скоростью его вращения относительно скорости вращения магнитного поля статора, то есть зависеть от скольжения и будет равна f2 = f1S.
Ток вторичной цепи при вращающемся роторе:

Также выражения для I2 может иметь:

Выше показанные выражения имеют не только различную форму записи, но и имеют совершенно разный физический смысл. А смысл его в том, что вместо вращающегося ротора можно рассматривать неподвижный, в котором будет индуцироваться ЭДС Е2. При этом индуктивное сопротивление будет равно Х2, а активное возрастет на величину  так как
так как  . При этом I1 останется прежним по фазе и величине, что не повлияет на потребляемую из сети мощность. Поскольку I1 и I2 не изменятся, то естественно и потери в первичных и вторичных цепях также не изменятся, соответственно мощность тоже не будет изменяться, а мощность развиваемая двигателем при вращении, будет равна мощности, потребляемой в добавочном сопротивлении . Таким образом, эквивалентная схема замещения асинхронной машины может быть заменена схемой замещения с добавочным сопротивлением rд во вторичной цепи:
. При этом I1 останется прежним по фазе и величине, что не повлияет на потребляемую из сети мощность. Поскольку I1 и I2 не изменятся, то естественно и потери в первичных и вторичных цепях также не изменятся, соответственно мощность тоже не будет изменяться, а мощность развиваемая двигателем при вращении, будет равна мощности, потребляемой в добавочном сопротивлении . Таким образом, эквивалентная схема замещения асинхронной машины может быть заменена схемой замещения с добавочным сопротивлением rд во вторичной цепи:

Т – образная схема замещения
После приведения первичной и вторичной ЭДС они будут равны Е1 = Е2 / и это дает возможность соединить эквивалентные точки и получить такую схему:

Недостатком Т – образной схемы замещения помимо сложностей расчета, является зависимость всех токов I1, I2 / , Iμ от скольжения s.
Из Т – образной схемы замещения видно, что в режиме холостого хода, при I2 / = 0 и s = 0, ток в контуре будет обуславливаться сопротивлениями намагничивающего контура и первичной цепи и совсем не будет зависеть от скольжения. Данное обстоятельство позволит вынести на зажимы электродвигателя намагничивающий контур и перейти к Г – образной схеме замещения.
Г – образная схема замещения
Данная схема замещения позволяет изучать процессы в асинхронном электродвигателе, которые имеют место при изменении скольжения электрической машины.

Учет контура намагничивания необходим при определении I1, который потребляется из сети. Но Г — образная схема замещения будет справедлива лишь при наличии определенных допущений:
- Все цепи имеют неизменные (постоянные) параметры. Это значит, что приведенное вторичное сопротивление r2 / не будет зависеть от частоты цепи вторичной (ротора), а насыщение не будет влиять на реактивное сопротивление статорных и роторных обмоток Х1 и Х2 / ;
- Полная проводимость намагничивающего контура принимается неизменной, а ток намагничивания, независимо от нагрузки, будет всегда пропорционален напряжению, приложенному к обмоткам;
- Потери добавочные не учитываются;
- Паразитные моменты, создаваемые высшими гармониками МДС, также не учитывают.
Следует также помнить и то, что в Г – образной схеме замещения в величины сопротивлений необходимо внести соответствующие поправки:


В выше перечисленных уравнениях величины имеющие индекс «дейст» соответствуют реальным значениям параметров асинхронной машины, а без индексов – те, которые используют в эквивалентной схеме.
Поскольку отношение r1/xμ довольно таки мало, то практически довольно часто принимают:

Обычно δ лежит в пределах 1,05 – 1,1.
Первичный ток I1 будет равен при любом скольжении:

Приведенный роторный ток:

Показанное выше выражение показывает, что ток ротора является функцией скольжения. При s = 0 I2 / = 0. При увеличении скольжения I2 / также будет расти, а при s = 1 достигнет своего максимума, или тока короткого замыкания, или пускового:

Если в роторной цепи отсутствует добавочное сопротивление (АД с КЗ ротором), пусковой ток может достигнуть довольно приличных значений, а именно 5 – 8 раз больше чем его номинальное значение.
Данная зависимость показана ниже:

Отношения пускового значения к номинальному является очень важным параметром для асинхронных машин с короткозамкнутым ротором, так как наличие пусковых токов приводит к просадкам напряжения, что особо ощутимо при использовании электродвигателей средней и большой мощности. Поэтому данная характеристика приводится в каталогах по выбору электрических машин.
Опытное определение параметров схемы замещения асинхронной машины.
Расчёт характеристик асинхронной машины будет более достоверным, если в их основу положить параметры схемы замещения, определяемые опытным путём.
Активное сопротивление обмотки статора  легко измерить ввиду доступности выводов статора. Остальные параметры асинхронной машины могут быть определены на основе несложных опытов холостого хода и короткого замыкания.
легко измерить ввиду доступности выводов статора. Остальные параметры асинхронной машины могут быть определены на основе несложных опытов холостого хода и короткого замыкания.
Режим холостого хода двигателя – это режим его работы без нагрузки на валу. Скольжение ротора в этом случае близко к нулю (S=0). Развиваемый двигателем электромагнитный момент  преодолевает лишь моменты от сил трения и момент сопротивления вентилятора, обдувающего двигатель. По сравнению с номинальным моментом величина
преодолевает лишь моменты от сил трения и момент сопротивления вентилятора, обдувающего двигатель. По сравнению с номинальным моментом величина  очень мала (
очень мала (  ). Ток ротора в этом режиме тоже близок к нулю (I / 2≈0). Мощность, потребляемая двигателем из сети Р10, переходит в потери: электрические в статорной обмотке Рэл1=m1 I0 2 R1; в стали статора Рст1 и механические Рмех:
). Ток ротора в этом режиме тоже близок к нулю (I / 2≈0). Мощность, потребляемая двигателем из сети Р10, переходит в потери: электрические в статорной обмотке Рэл1=m1 I0 2 R1; в стали статора Рст1 и механические Рмех:
Если у трансформатора величина тока холостого хода составляет несколько процентов от номинального, то в асинхронном двигателе – несколько десятков процентов (до 70…80% у многополюсных двигателей небольшой мощности).
Режим холостого хода позволяет определить сумму индуктивных сопротивлений статорной обмотки и намагничивающего контура схемы замещения
а также активное сопротивление намагничивающего контура схемы замещения
В опыте холостой ход измеряют мощность, потребляемую двигателем Р10, ток обмотки статора I0 и напряжение U1, приложенное к ней. Последнее обычно меняют в пределах (0,4…1,2) U1н, если желательно определить параметры х.х. при различных насыщениях магнитной цепи двигателя.
При известном сопротивление R1 вычисляют мощность Рхх = Рст1+Рмех = Р10 – m1I0 2 R1, а затем строят зависимость  (Рис. 3.11).
(Рис. 3.11).
Поскольку потери в стали пропорциональны квадрату индукции (или квадрату приложенного напряжения), а механические потери остаются при изменении напряжения постоянными, зависимость (Рст1+Рмех) = f(U1 2 ) очень близка к прямой. Продолжая на графике эту прямую до пересечения с осью ординат, определяем Рмех. Таким образом определяют суммарные потери в стали Рст1 и механические Рмех, при этом потери в стали могут быть вычислены при любом напряжении.
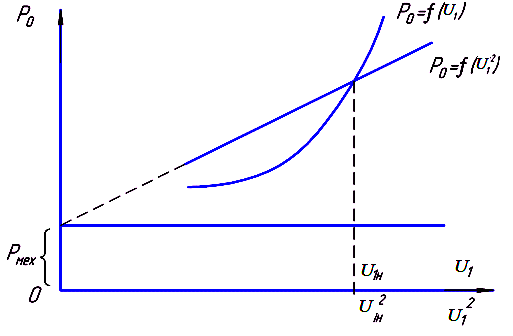
Рисунок 3.11 Зависимость потерь в стали и механических потерь от приложенного напряжения
Режим короткого замыкания асинхронного двигателя возникает в том случае когда ротор заторможен, S = 1. Опыт короткого замыкания проводят при пониженном значении подводимого напряжения U1, так чтобы ток статора I1k находился в пределах (0,25…1,25)I1н. По измеренным величинам напряжения U1, тока статора I1k и потребляемой мощности Р1к находят:
полное сопротивление короткого замыкания

активное сопротивление короткого замыкания
 ;
;
индуктивное сопротивление короткого замыкания
При измеренной величине R1 можно найти значение приведённого активного сопротивления обмотки ротора R2 1 = Rk — R1. Принимая в режиме опыта к.з.

 находят значение Х1 и Х2 ‘ .
находят значение Х1 и Х2 ‘ .
Из данных опытов холостой ход и короткое замыкание определяют значение индуктивного сопротивления контура намагничивания:
 .
.
На рисунке 3.12 показана зависимость I1k = f(U1).
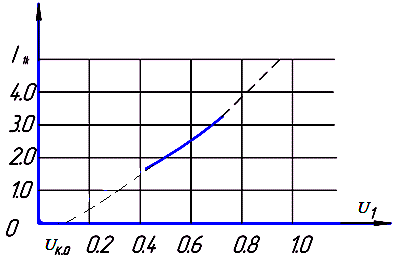
Рисунок 3.12 Зависимость тока статора в режиме короткого замыкания от приложенного напряжения
Эта зависимость, при токах I1k> I1н. Вогнутость начальной части кривой I1k = f(U1) объясняется уменьшением сопротивления Х1 и Х2 ‘ вследствие увеличения насыщение зубцовых слоёв возрастающими потоками рассеяния.
Величину тока короткого замыкания при номинальном напряжении, равную величине начального пускового тока двигателя I1кн=I1п определяют по выражению:
 ,
,
где  — ток короткого замыкания при наибольшем напряжении, достигнуто в опыте;
— ток короткого замыкания при наибольшем напряжении, достигнуто в опыте;
 — смотри рис 3.12.
— смотри рис 3.12.
Предполагая, что практически отношение токов короткого замыкая пропорционально напряжениям, мощность Р1к пересчитывают пропорционально квадрату напряжений:
Дата добавления: 2015-09-18 ; просмотров: 1865 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ







