CNC-DESIGN
В корзине пусто!
Настройка тока драйвера шагового двигателя
Драйвер шагового двигателя является достаточно важным компонентом любого ЧПУ устройства, управляя движением каждой из осей. Перед использованием необходимо убедиться, что они правильно установлены и настроены, чтобы не допустить перегорание шаговых моторов или платы контроллера Arduino Sheild.
Настройку тока драйвера необходимо сделать для решения нескольких достаточно важных моментов:
— уменьшить вероятность пропуска шагов при низком токе;
— снижение нагрева драйвера и шагового двигателя при высоком напряжении;
— снизить шум при высоких значениях тока;
Для настройки тока нам понадобится:
— контроллеры с установленными драйверами;
— драйвера А4988 или DRV8825 ;
— мультиметр;
— отвертка.
Для начала необходимо собрать и подключить всю систему в полношаговом режиме. После сборки «бутерброда» из контроллера Ардуино, ЧПУ шилда и драйверов шаговых двигателей необходимо подключить шаговые двигатели. В описании к выбранным моторам надо узнать значение максимального тока Imax (для примера у шагового двигателя 17HS8401 это значение 1,8А)
Затем надо рассчитать значение опорного напряжения Vref на переменном резисторе для каждого типа драйверов, у нас их два: А4988 или DRV8825.
Формула опорного напряжения Vref для драйверов отличается.
Расчет для драйвера типа А4988.
Для A4988 формула расчета зависит от номинала резисторов, которые распаяны на плате драйвера. Если присмотреться, то можно увидеть надписи R050 или R100. 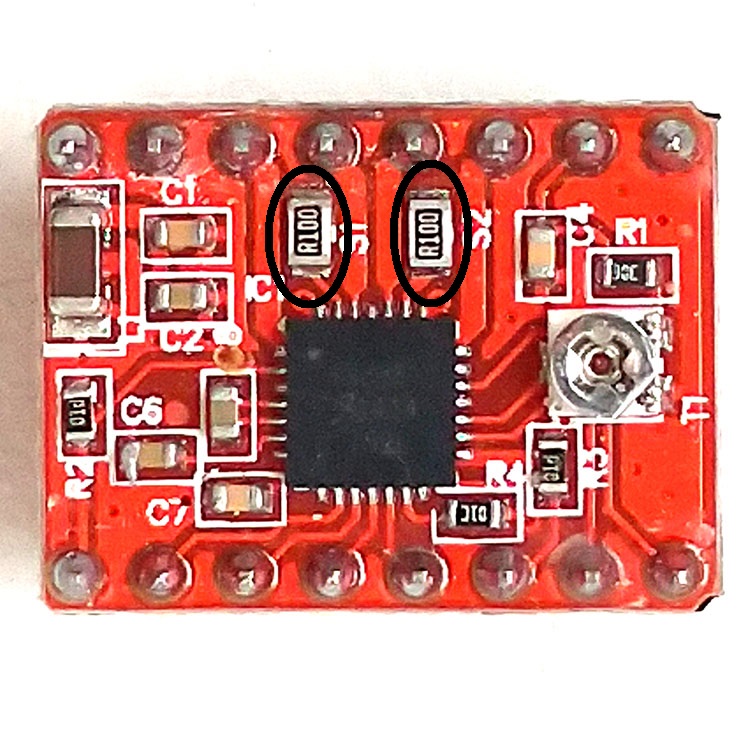
На приведенной фотографии они обведены черными кружками, их значение R100.
В общем виде формула выглядит как:
Vref = Imax * 8 * (RS)
Imax — максимальный ток на обмотках двигателя, из описания;
RS — сопротивление резистора, если резистор подписан R100, то RS=0,100, при R050 значение RS=0,05.
Для двигателя из нашего примера 17HS8401
Vref = 1,8 * 8 * 0,100 = 1,44 В.
Из-за того, что рабочий ток двигателя обычно рекомендуется ограничивать в 70% от максимального тока, для уменьшения перегрева двигателя, полученное значение необходимо умножить на 0,7.
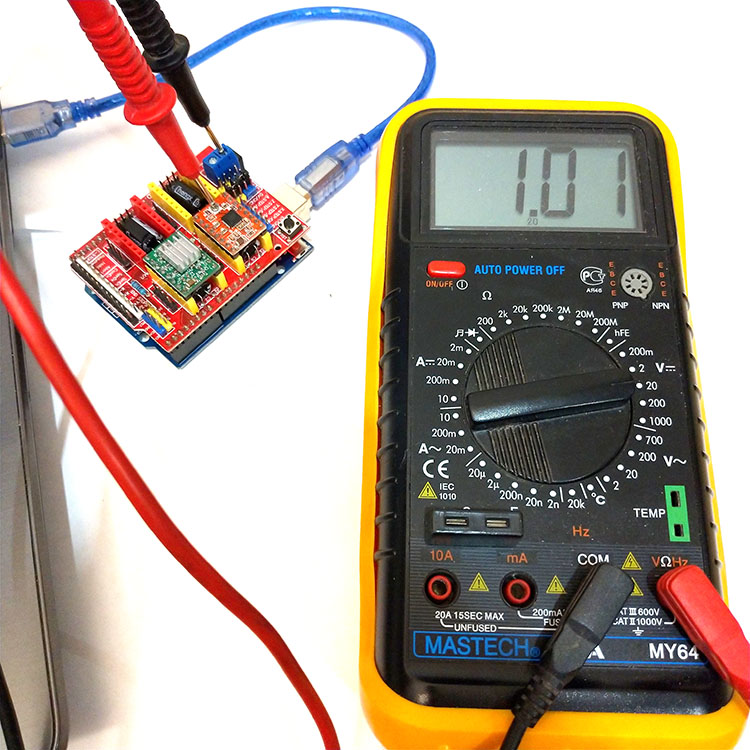
Vref= 1,44*0,7 = 1,01 В.
Расчет для драйвера типа DRV8825.
Формула опорного напряжение для данного типа драйвера:
При рекомендованной работе на 70% от максимального тока двигателя, подставив значения для нашего примера, получим следующие значения:
Vref = 0.7*1,8 / 2 = 0.63V
Настройка тока драйвера на контроллере.
Для настройки необходимо подключить сборку плат к компьютеру,
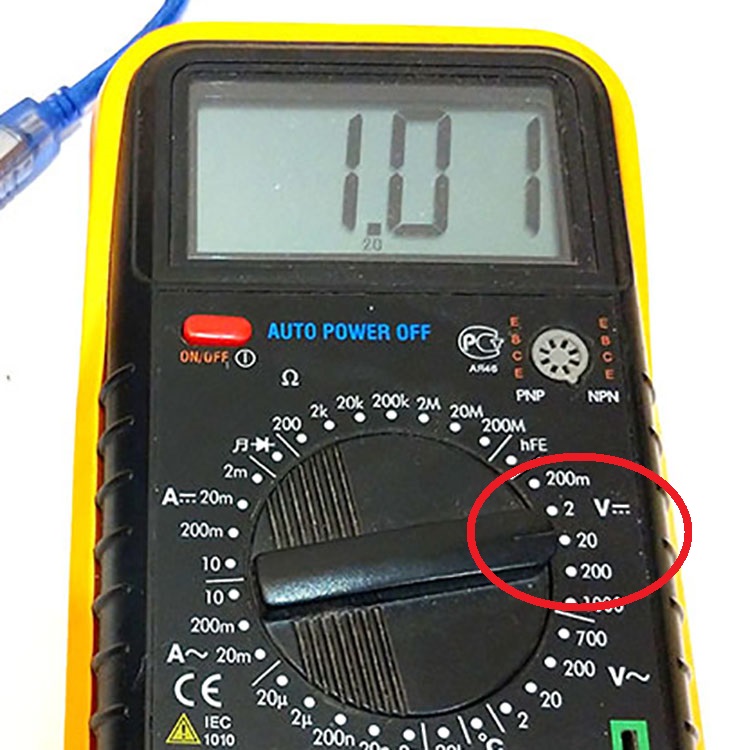
Включить на мультиметре измерение постоянного напряжения напротив положения «20».
Для измерения напряжения необходимо минусовой щуп приложить к минусу на CNC Sheild, а положительный щуп замкнуть с подстроечным резистором, который по совместительству является «+» в данной схеме.
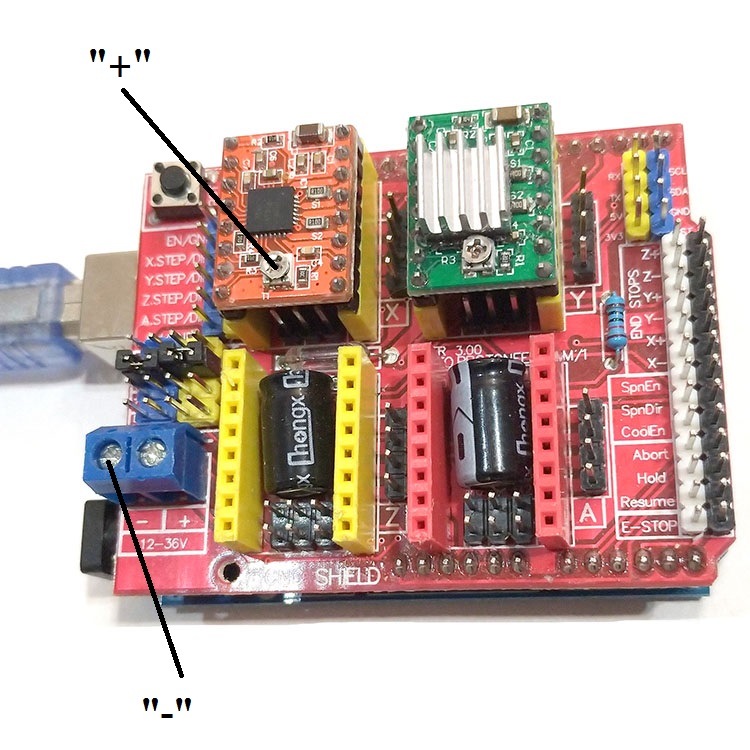
Необходимо вращать подстроечный резитор, пока мультиметр не покажет требуемое значение напряжения, при вращении по часовой стрелке, значения растут, против часовой стрелки — напряжение падает.
Настройку расчетных значений необходимо повторить это для всех активных драйверов в сборке.
Установка тока шаговых двигателей 3D дельта принтера. Снижение резонансных вибраций
30.09.2016 Сайт https://anteh.ru
Шум и вибрации эффектора снижаются подбором скорости печати, тока X Y Z драйверов, напряжением питания шаговых двигателей, перестановкой драйверов, возможно правильным подбором параметра dropsegments.
При установке платы драйвера шагового двигателя в RAMPS 1.4, перед запуском шаговых двигателей, обязательно установить ток драйвера под используемый двигатель, или хотя бы его уменьшить. По умолчанию у красных A4988 опора стоит в 0.8V это 1A ничего плохого не случится, но у DRV8825 опора выставлена в 1.6V -это максимальный ток, в теории 3.2А, по документации DRV8825 рассчитан максимум на 2.5A(2.2А с обдувом), это может повредить, как двигатель, так и драйвер.
В используемом дельта принтере стоит 4ре драйвера, китайские красные A4988 на фото ниже слева:
 |  |
Они не позволяют установить максимальный паспортный ток шаговых двигателей 3х вертикальных X Y Z осей 1.7A (и это хорошо). Предельный ток для шагового двигателя экструдера(JK42HS40-1204D) 1.2A, для шаговых двигателей X Y Z осей(JK42HS60-1704A) 1.7А. Согласно документации максимальный ток у А4988 2A. Но у используемой платы драйвера A4988 его невозможно установить более 1.5A. Т.е. максимальный ток можно установить только для шагового двигателя экструдера. Связано с использованием вместо 20k резистора 30k в цепи формирования опорного напряжения платы драйвера. Сделано скорее для предотвращения перегрева и повреждения шаговых двигателей. Слишком большой ток может их повредить и в установке максимального тока нет необходимости, особенно для дельта принтера. Для дельта принтера ток устанавливаю на 30% меньше их максимального паспортного значения.
Забегая вперёд, использование дробления шага 1/32 вместо 1/16 не приведёт к увеличению разрешения принтера. Это приведёт к увеличению нагрева драйвера и двигателя, снижению момента двигателя. Не всегда использование 1/32 приведёт к снижению шума, как в режиме удержания, так и режиме хода. Поправить разрешение можно здесь. Всё будет зависеть от индивидуальных особенностей принтера, платы драйвера, шаговых двигателей. Причём оно настолько индивидуально, что при перестановке вроде бы одинаковых плат драйверов шум может уменьшиться или увеличится. Т.е. «шаманство» ещё то. В моём случае использование DRV8825 с дроблением 1/32 привело к существенному увеличению шума при удержании. Слабо уловимый свист А4988(Vref=1.2V=1.5A дробление 1/16) сменился на довольно заметное шипение/шелест DRV8825(Vref=0.85V=1.7A дробление 1/32) и только снижение тока до 0.9A поменяло шипение на еле различимый свист. Причём Y двигатель перестал шипеть при 1.2A, X при 1.1A, Z при 0.9. Перестановка одинаковых X Y Z драйверов меняет картину. В общем двигатель Y шипит/свистит существенно меньше остальных как с DRV8825 так и с А4988. Причём перестановка одинаковых драйверов меняет его шумность. Как видим всё не просто. Получается, для снижения шума нужно подбирать двигатели, драйвера, провода, мощность блока питания, напряжение питания двигателей, например поднять с 12 до 14V.
Субъективно показалось, что при 1/32 ход по Z более тихий, но были положения в которых двигатель начинал очень сильно «шелестеть» почти скрипеть и положения, в которых его было не слышно.
Фантазии по поводу разрешения. Для увеличения разрешения нужно использовать 0.9градусные двигатели вместо 1.8, с энкодером. Не дёшево и в ряде случаев это ничего, кроме опыта и морального удовлетворения не даст. Использую сопло 0.8мм толщина слоя 0.5мм, планирую на сопло 1.2 переходить. Диаметр стола 400 высота 835. Измеренная микрометром вертикальная погрешность, каждой из X Y Z осей используемого дельта принтера, при смене направления движения каретки 0.11мм. С такой погрешностью нет смысла о разрешении шагового двигателя беспокоиться, но это сравнительно малая погрешность. Используются рельсовые направляющие HIWIN, ремень GT2.
Как оно было:
Показалось, что с А4988 принтер работает шумновато, решил попробовать DRV8825. 5шт. можно за 10$ приобрести, сам покупал за 275р. с рук:
 |  |
Обращайте внимание на правильность ориентации платы драйвера при установке. Смотрите на шелкографию RAMPS 1.4 и нижней стороны платы драйвера, чтобы пины GND VDD и пр. совпадали.
У DRV8825 максимальный шаг дробления 1/32 в 2 раза больший, чем у А4988. По умолчанию, джамперами, у А4988, шаг дробления выставлен 1/16. Такое же положение джамперов соответствует дроблению 1/32 у DRV8825. Ко всему нужно подправить прошивку и убедиться, что параметры применились, или в настройках, через меню принтера увеличить параметры в 2 раза control ->motion, смотрим последние 4ре параметра:
 |
Это стандартные значения для 1.8град двигателя, дробление 1/16, ремень GT2 шаг 2мм и количество зубьев на шкиве двигателя =20. Для дробления 1/32 нужно установить Xsteps/mm, Ysteps/mm, Zsteps/mm в 160. Esteps не трогал, для него оставлен А4988.
Также можно в исходнике прошивки marlin поменять:
#define DEFAULT_AXIS_STEPS_PER_UNIT <80, 80, 80, 155>//
на:
#define DEFAULT_AXIS_STEPS_PER_UNIT <160, 160, 160, 155>//
При необходимости 4ре коэффициента можно вычислить так:
Для дельта принтера первые 3 коэффициента будут одинаковыми -это X Y X одинаковые двигатели.
360/1.8 = 200 шагов на оборот. 1.8 -угол шага.
(200*16)/(2*20) = 80 = (шагов на оборот * количество микро шагов устанавливается джамперами на RAMPS 1.4) /(приводной ремень GT2 с шагом 2 мм * 20-ти зубчатые шкивы на роторе шаговых двигателей каждой из XYZ осей)
Последний коэффициент экструдера рассчитывается так:
((200*16) / (d шкива подачи прутка * 3.14))*1.1 = (3200/(7.2мм*3.14))*1.1=
155
d шкива подачи прутка -это наименьший его диаметр в центе. Коэффициенты могут быть дробными.
Расчёт опорного напряжения, для выставления предельного тока драйвера делается так:
Для A4988:
Vrefэкструдер = 1.2А * 8 * 0.1Ом = 0.96V
Vrefxyz = 1.7А * 8 * 0.1Ом = 1.36V
Для DRV8825:
Vrefэкструдер = 1.2А * 5 * 0.1Ом = 0.6V
Vrefxyz = 1.7А * 5 * 0.1Ом = 0.85V
Значения можем уменьшить на 30%.
Для установки опорного напряжения используем любой мультиметр и отвёртку с изолированной ручкой. Включаем принтер, щуп минуса мультиметра на GND(земля) платы драйвера, плюс на движок подстроечного резистора -то что отвёрткой будем крутить. Двигатели должны быть отключены. Отвёрткой аккуратно выставляем нужное напряжение. Разные драйвера мешать можно, повторюсь соблюдайте правильную ориентацию установки драйвера, или приобретайте их с запасом.
А теперь эксперимент с попыткой снижения шума двигателей через стабилизацию опорного напряжения:
По анализу принципиальных схем: A4988 использует 2 напряжения +5V и +12V питания двигателей. DRV8825 использует только +12V питания двигателей. Vref у A4988 формируется напрямую из +5V, у DRV8825 Vref формируется из +12V питания двигателей через встроенный стабилизатор +3.3V максимальный выходной ток 1ma. Было предположение, что чрезмерный шелест/свист может быть следствием плохой стабилизации Vref.
Есть ещё несоответствие маркировки на нижней стороне платы драйверов, у A4988 1B 1A 2A 2B, у DRV8825 2A 1A 1B 2B. Скорее всего ,в первом случае для обозначения канала использовалась цифра, во втором буква. Не обращаем внимания.
 |
На +5 и +12V была добавлена чип керамика 10u и 0.1u. И вместо +3.3V опоры, на подстроечный резистор, через 12k, были заведены +5V. Т.е. реализована схема как у A4988.
Ток был выставлен такой же, как и для A4988. Дробление задано такое же 1/16.
Результат:
С Vref всё было в порядке, субъективно, по показаниям осциллографа встроенные 3.3V лучше, чем внешние +5V. Т.е. предположение о повышенном шуме из-за нестабильности Vref было не верным. Доработка не нужна. Из произведённой доработки смысл есть оставить на +12V конденсаторы 10u и 0.1u.
Что касается акустического шума, с DRV8825 он субъективно стал меньше на 1/16. После autohome слышится ощутимый шелест, но при минимальном движении по X или Y наступает тишина, еле различимый свит, субъективно меньше, чем у A4988. Не обошлось без перестановки местами драйверов, шум при удержании снизился.
Единственно явное преимущество замены A4988 на DRV8825 -это снижение тепловыделения, можно смело палец на радиаторе держать сколько угодно долго. DRV8825 с током 1.2А. шаг дробления 1/16. Под платой драйвера первый второй джампера сняты, третий установлен. Если использовать шаг дробления 1/32 то тепловыделение будет больше, чем для A4988 c 1/16.
Из всего делаю выводы:
0. Со стабильностью Vref=3.3V у DRV8825 никаких проблем.
1. Для тестируемого принтера предпочтительно использование DRV8825 с шагом дробления 1/16 и с правильно выставленным током для используемой скорости печати. Снижает шум и в силу особенностей конструкции существенно снижает нагрев драйвера. Можно в цепь +12V на драйвер напаять конденсаторы, чип керамику, например 10u(или более) 25V 1206 и 0.1u 0805, хуже не будет.
2. Но если Вы решили собрать принтер сами, безопаснее использовать A4988, в отличие от DRV8825 у неё производитель выставляет безопасный ток 1A, предельный ток 1.5A, который при недосмотре не угробит, ни сам драйвер, ни двигатель. На A4988 можно в цепи питания +5 и +12V на драйвере напаять дополнительную чип керамику.
3. Единственное что позволило снизить шипение при удержании -это снижение тока и перестановка драйверов местами, дробление(для используемого принтера) осталось 1/16. DRV8825 субъективно начинал шипеть на большем токе, чем A4988. С DRV8825 печать различимо тише. Можно попробовать купить пачку другую шаговых двигателей и подобрать наименее шумные, вряд ли в этом есть смысл.
Реально и объективно замена A4988 на DRV8825, снизит тепловыделение при дроблении 1/16 и шум при печати. Перестановка драйверов местами может снизить шум/шелест при удержании двигателя. Снижение тока драйверов снижает шум, но нужно следить за отсутствием пропуска шагов. Для дельта принтера можно ставить ток на 30% и более % меньше максимального паспортного тока шагового двигателя, но нужно следить за отсутствием пропуска шагов и отсутствием вибраций эффектор. Использование дробления 1/32 увеличивает тепловыделение драйвера, снижает максимальную скорость печати и не всегда приводит к снижению аккустического шума и резонансных явлений.
Установка тока X Y Z драйверов дельта принтера
Последняя на 15.09.2016 прошивка marlin, меняем параметр DEFAULT_STEPPER_DEACTIVE_TIME с 60 на 600, чтобы двигатели не отключались через 60 секунд при простое:
#define DEFAULT_STEPPER_DEACTIVE_TIME 600
Команда autohome g28, включаем шаговые двигатели на удержание. Меряем и настраиваем токи XYZ драйверов, как 30% от максимального паспортного значения тока двигателя. По паспорту 1.7A настраиваем 1.2А.
Создаём или берём какую-либо длинную модель, растягиваем на весь рабочий стол, скорость печати задаём, например 35мм/сек, формируем G код. Высоту печати настраиваем, чтобы она началась на высоте, например 50мм от поверхности стола, филамент вытаскиваем из экструдера, реальная печать не производится. Через SD карту запускаем на печать. На LCD экране принтера скорость печати 100%, фейдером её можно до 999% довести т.е. увеличить с 35мм/сек до 35*9.99 до 350мм/сек. Смотрим максимальную паспортную скорость принтера, в текущем случае производитель заявляет 300мм/сек. Т.е. при скорости печати 35мм/сек могу произвести аппаратное увеличение скорости печати через меню принтера до 850%.
Далее, у нас есть 2 настраиваемых параметра, аппаратная скорость печати от 100%(35мм/сек) до 850%, это 35-300мм/сек и ток X Y Z драйверов. Как обратную связь контролируем пропуск шагов и вибрации эффектора при движении хотэнда по окружности и/или прямой.
Проверим пропуски шагов, настраиваем токи X Y Z в 1.2A (для 1.7А двигателей), и плавно увеличиваем скорость печати шагами по 50%. Для DRV8825 ток 1.2А заметные пропуски начинаются на 850%. Проявляются в виде щелчков и опускании плоскости печати по вертикальной оси вниз, во время щелчков экструдер понемногу приближается к столу, причём наблюдается перекос плоскости печати. Ниже 3 демонстрационных видео демонстрирующих пропуски шагов:
DRV8825 ток 1.2А скорость 300мм/сек
DRV8825 ток 1.6A скорость 300мм/сек
A4988 ток 1.2A скорость 300мм/сек
Реальная комфортная скорость для точной печати у этого принтера 25-40мм/сек, после описанных изменений. Можно печатать до 100мм/cек. Драйвер DRV8825 ток 0.8А, дробление 1/16. Максимальная скорость в районе 200мм/сек, с DRV8825, если выше, то наблюдаются пропуски.
Для DRV8825 ток 0.5А, 1/16, пропуски наблюдаются на 300% или 105мм/сек. В управляющем файле задана скорость 35мм/сек.
Тестируемый принтер, вопреки маркетинговым заявлением продавца, не будет работать со скоростью печати 300мм/сек, нужно пробовать увеличить напряжение питания шаговых двигателей.
Наблюдается некая вилка скоростей печати, при которых эффектор не вибрирует, резонансные явления минимальны. Он вообще не вибрирует, до скоростей 40-60мм/сек, далее начинает немного вибрировать в центральной части стола. Потом вибрации усиливаются и затем на 250мм/сек и более, снижаются. Увеличение напряжения питания шаговых двигателей должно увеличить скорость их работы, и соответственно скорость печати, что весьма актуально, в том числе изменить шумность работыи повлиять на резонансные явления.
На скоростях, в районе 300мм/сек и более, для тестируемого принтера, вибрации эффектора слабы. Чем плохи вибрации эффектора или резонанс? Качество печати не проверял, но помимо шума резонанс убивает механику принтера, существенно снижает момент. В любом случае 40-60мм/сек качественной печати это очень хорошо. Резонанс существенно снижает момент двигателя, дробление шага также снижает момент, но если, например при дроблении 1/8 будет наблюдаться резонанс, а при 1/16 его не будет, то можно сказать что при увеличении дробления до 1/16 момент увеличился т.к. исчез резонанс. Паразитный резонанс может снижать момент в большей степени, чем дробление.
Пока закончилось так: драйвер DRV8825, ток X Y Z =1.3A, дробление 1/16. Питание шаговых двигателей оставлено прежним +12V. На глаз — увеличение тока драйверов X Y Z приводит к снижению вибраций эффектора. Возможно, ток будет установлен в 0.6A и напряжение питания +24VDC от линейного источника питания. Об этом в других статьях







