- Драйвер моторов MX1508 двухканальный (1.5 А)
- Характеристики
- Подключение
- #29. Подключаем драйвер мотора MX1508 к Arduino.
- Характеристики драйвера MX1508:
- Общие сведения о драйвере MX1508.
- Подключение MX1508 к Arduino (коллекторный двигатель).
- Схема подключения MX1508 к Arduino, и коллекторного двигателя к MX1508.
- Описание скетча:
- Обзор драйвера мотора MX1508
- Технические параметры
- Общие сведения
- Подключение MX1508 к Arduino (коллекторный двигатель)
- Драйвер моторов MX1508
- AVRobot.RU
Драйвер моторов MX1508 двухканальный (1.5 А)
Двухканальный драйвер моторов на базе микросхемы MX1508 может одновременно управлять двумя двигателями постоянного тока, либо одним 4-проводным шаговым двигателем.
Драйвер на базе MX1508 эффективен при использовании в портативных механических устройствах, так как напряжение питания находится в широком диапазоне и может составлять от 2В до 10В, а потребляемый ток в режиме ожидания составляет менее 0.1мкА. Модуль имеет 2 канала с силой тока 1.5A, пиковые токи могут составлять до 2.5A.
Драйвер отличает наличие МОП ключей (MOSFET-транзисторы) с низким сопротивлением и малое тепловыделение, благодаря которому можно использовать модуль без дополнительных радиаторов.
В микросхеме имеется контур защиты с гистерезисом (ТСД), предотвращающий перегрев. Он автоматически включает модуль заново при понижении температуры микросхемы до приемлемой.
Характеристики
| Напряжение для моторов: | 2-10 В |
| Напряжение для управляющих контактов: | 1,8-7 В |
| Номинальный (рабочий) ток для каждого мотора: | 1,5 А |
| Максимальный ток для каждого мотора: | 2,5 А |
| Потребляемый ток в режиме ожидания: | 0,1 мА |
| Тип драйвера: | Н-мост |
| Размеры: | 24,7 х 21 х 5 мм |
| Цена: | 30 руб. |
Подключение
Драйвер работает как самостоятельное устройство и совместим с любыми микроконтроллерами, включая Arduino.
Подключается к плате через цифровые выходы к ШИМ-пинам на Ардуине. Для работы достаточно стандартных библиотек Arduino IDE.
 Пример подключения
Пример подключения
#29. Подключаем драйвер мотора MX1508 к Arduino.
Модуль двигателя MX1508, рассмотренный в этой статье, рекламируется на Aliexpress как «Двухканальная плата драйвера двигателя постоянного тока L298N, PWM Speed Dual H Bridge Stepper Module», однако присутствует микросхема MX1508 китайского производства. Также отличаются характеристики драйвера MX1508 от L298N. Давайте рассмотрим подробней данный драйвер и разберемся, как его подключить к Arduino и управлять моторами постоянного тока.
При управлении, например, с платой Arduino UNO, можно управлять двумя двигателями, при этом вращать в любом направлении каждый двигатель. Драйвер представляет из себя Н-мост с рабочим током 800 мА и пиковым током 2,5 А, а также, со встроенной системой контроля температуры.
Характеристики драйвера MX1508:
- Напряжение питания модуля 2 — 9,6 В.
- Диаметр монтажного отверстия: 2 мм.
- Входное напряжение сигнала: 1,8- 7 В.
- Ток для одного канала: 0,8 А.
- Пиковый ток: до 2,5 А.
- Ток в режиме ожидания: менее 0,1 мкА.
- Схема защиты от перегрева: встроенная (TSD) с эффектом гистерезиса.
- Размер: 24,7 х 21 х 7 мм.
Общие сведения о драйвере MX1508.
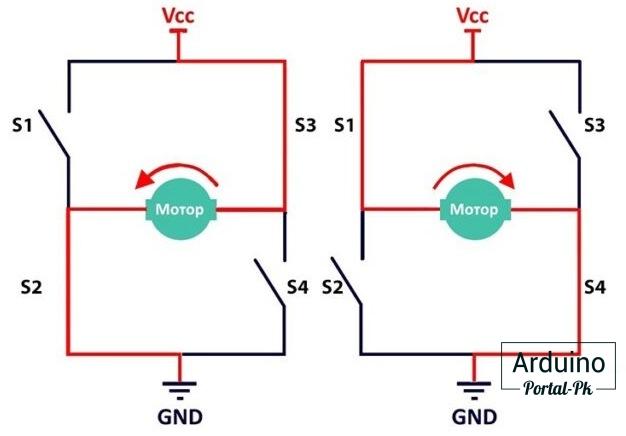
Основной чип модуля — это микросхема MX1508, состоящая из двух H-мостов (H-Bridge), один для выхода A, второй для выхода B, каждый канал рассчитан на 0,8 А с пиком 2,5 А. H-мост широко используется в электронике и служит для изменения вращения двигателя, схема H-моста содержит четыре транзистора (ключа) с двигателем в центре, образуя H-подобную компоновку. Принцип работы прост, при одновременном закрытии двух отдельных транзисторов, изменяется полярность напряжения, приложенного к двигателю. Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.
Управлять двигателем можно низковольтным напряжением, ниже, чем напряжение на плате Arduino. Для управления скоростью используется широтно-импульсная модуляция (PWM).
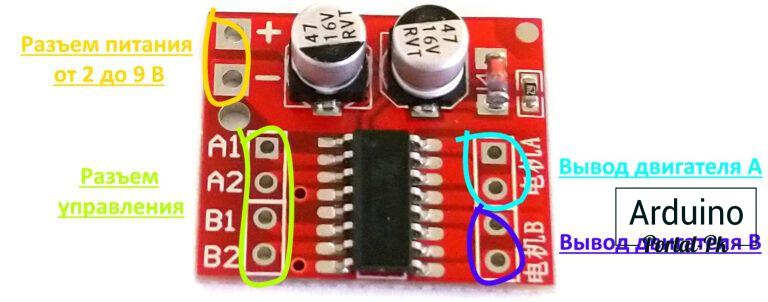
Модуль MX1508 содержит разъем для подключения питания, два выхода A и B, и разъем управления, с назначением каждого можно ознакомиться ниже:
- Вывод «+» и «-» — питание модуля и двигателей, от 2 до 9,6 В;
- Выводы A1 и A2 — используются для управления направлением вращения двигателя A;
- Выводы B1 и B2 — используются для управления направлением вращения двигателя B;
- Выходы MOTOR A — разъем для двигателя A;
- Выходы MOTOR B — разъем для двигателя B;
Подключение MX1508 к Arduino (коллекторный двигатель).
Необходимые детали:
- Arduino UNO.
- Драйвер мотора на MX1508.
- Коллекторный двигатель.
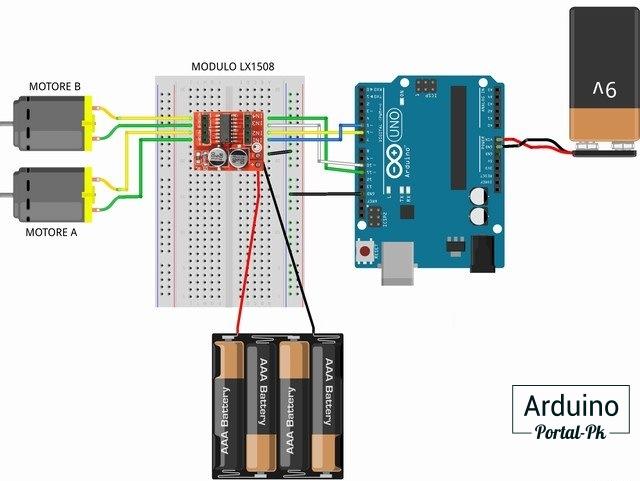
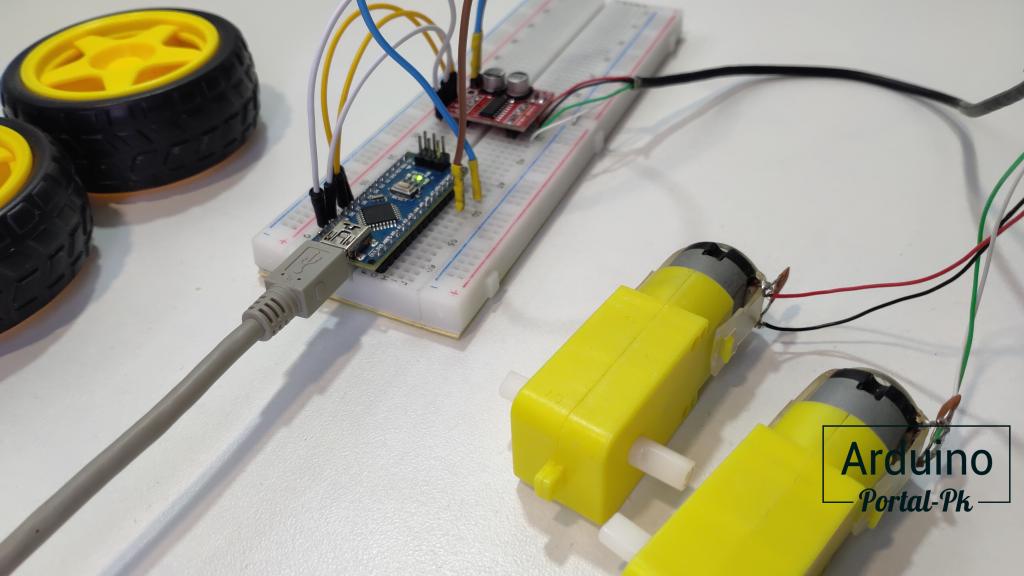
Схема подключения MX1508 к Arduino, и коллекторного двигателя к MX1508.
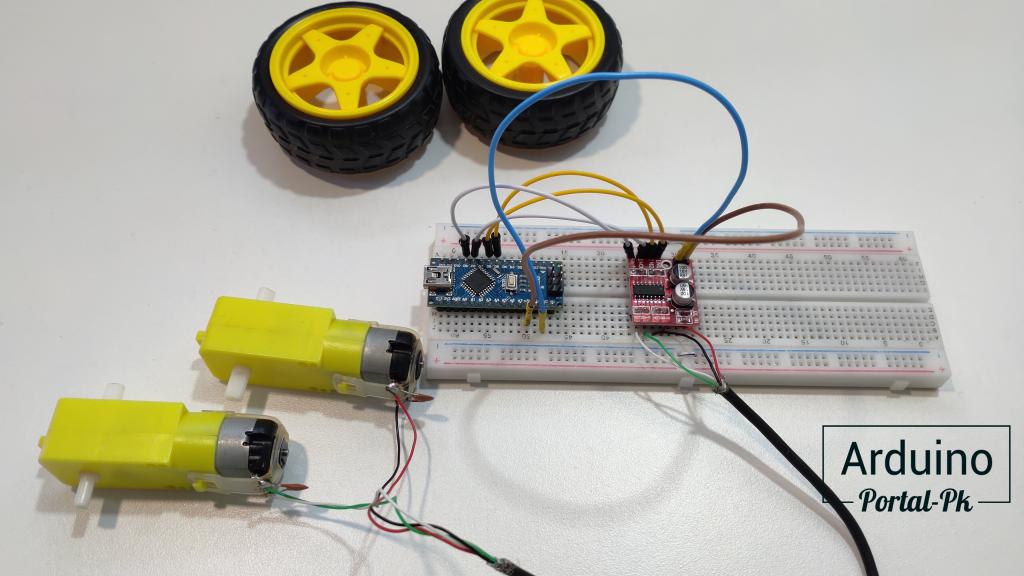
Первым делом, необходимо подключить источник питания от 2 до 9,6 B к модулю (в примере используется 5 В. от Arduino). Далее, подключаем управляющие провода A1, A2, B1, B2 (встречается маркировка, как на L298: IN1, IN2, IN3, IN1) к цифровым выводам Arduino 10, 11, 5 и 6. Теперь, подключаем двигатели, один к клеммам MOTOR A , а другой к клеммам MOTOR B. Схема подключения приведена ниже.
Теперь подключаем Arduino к компьютеру и загружаем скетч ниже.
Описание скетча:
Скетч простой, не требует дополнительных библиотек. Первым делом, указываем, к каким выводам подключен модуль.
Управление скоростью осуществляется с помощью ШИМ, для удобства используем переменную speed, в которой указываем скорость двигателя. Значение «0» — значит остановка, а «255» равносильно напряжению питания, и двигатели крутятся на максимальной скорости.
Далее, мы указываем, что данные выводы используем как выход.
Направление вращения двигателя осуществляется с помощью выводов A1 и A2 — для первого двигателя, B1 и B2 — для второго двигателя, то есть, если подать на вывод A1 — 0B (LOW), а на A2 — 5B (HIGH), двигатель A будет вращаться вперед (так же и для двигателя B). Для вращения назад, необходимо подать на A1 — 5B (HIGH), а на A2 — 0B (LOW), двигатель A будет вращаться назад (так же и для двигателя B). На основании этого напишем небольшие функции, которые позволят вращать оба двигателя вперед, назад, в противоположном направлении, и останавливать вращение обоих двигателей.
Реализуем вывод в монитор порта информацию о направлении вращения двигателя в данный момент.
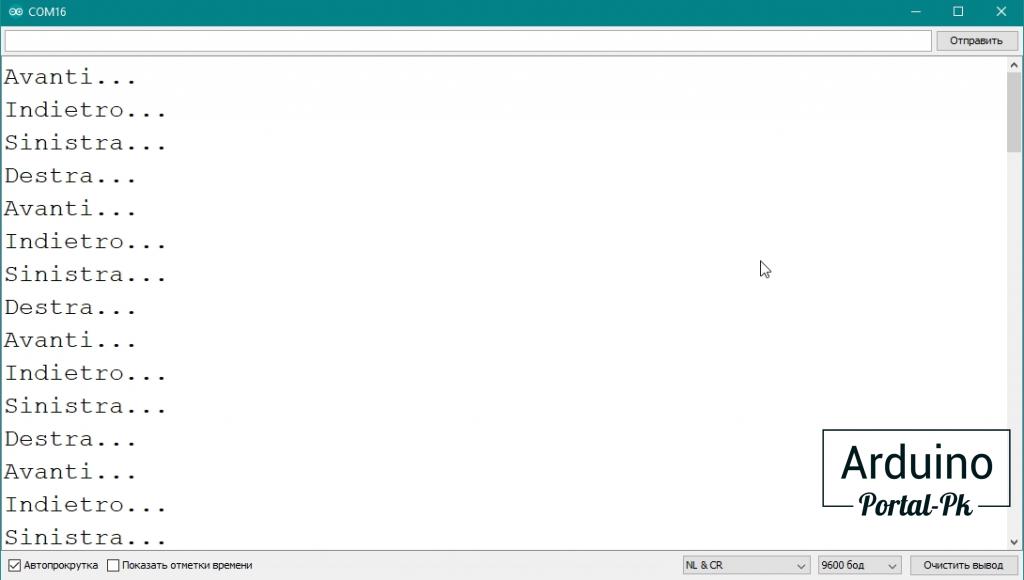
Это поможет определить, правильно ли мы всё подключили, или нет. Если двигатели будут вращаться не в том направлении, как выводится в мониторе порта, то необходимо поменять местами провода подключения двигателей, и повторить проверку. Эта информация позволит настроить минимальный код для создания радиоуправляемой машины. Вот такие машинки я делал на Arduino и ESP8266 с использованием драйвера L298:
- Собираем Arduino машинку на Motor Shield L293D и ИК пульте.
- Машинка на радиоуправлении. Arduino + nrf24l01 + пульт.
- Самодельная Wifi машинка на NodeMCU. Машина делает дрифт.
Используя драйвер MX1508, собрать данные проекты не составит труда, так как код из проектов выше совместим с драйвером MX1508.
Появились вопросы или предложения, не стесняйся, пиши в комментарии!
Не забывайте подписываться на канал Youtube и вступайте в группы в Вконтакте и Facebook.
Всем Пока-Пока.
И до встречи в следующем уроке.
Понравилась статья? Поделитесь ею с друзьями:
Обзор драйвера мотора MX1508
Автор: Сергей · Опубликовано 03.03.2020 · Обновлено 02.04.2020

В этой статье расскажу о драйвера на базе микросхемы MX1508, который идеально подойдет для управления двигателями в игрушечных автомобилями, роботах и других устройств. По сути этот драйвер может заменить популярный модуль L298N.
Технические параметры
► Напряжение питания: 2 — 10 В
► Рабочий драйвера на один канал: 1.5 А (пиковый ток 2.5 А, не более 10 секунд)
► Входной сигнал логика: 5 В
► Габариты: 24,7 х 21 х 0,5 мм
Общие сведения
Основной чип модуля это микросхема MX1508, состоящая из двух H-мост (H-Bridge), один для выхода A, второй для выхода B, каждый канал рассчитан на 1,5 А с пиком 2,5 А. H-мост широко используется в электронике и служит для изменения вращения двигателем, схема H-моста содержит четыре транзистора (ключа) с двигателем в центре, образуя H-подобную компоновку. Принцип работы прост, при одновременном закрытие двух отдельных транзистора изменяется полярность напряжения, приложенного к двигателю. Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.

Управлять двигателями можно низковольтным напряжением, ниже, чем напряжение на плате Arduino. Для управления скоростью используется широтно-импульсная модуляция (PWM).

Модуль MX1508 содержит разъем для подключения питания, два выхода A и B и разъем управления, назначение каждого можно ознакомится ниже:
► Вывод + и — — питание модуля и двигателей, от 2 до 10 В;
► Вывода A1 и A2 — используются для управления направлением вращения двигателя A;
► Вывода B1 и B2 — используются для управления направлением вращения двигателя B;
► Выходы MOTOR A — разъем для двигателя A;
► Выходы MOTOR B — разъем для двигателя B;
Подключение MX1508 к Arduino (коллекторный двигатель)
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер мотора на MX1508 x 1 шт.
► Коллекторный двигатель x 2 шт.
Подключение:
Первым делом необходимо подключить источник питания от 2 до 10 B к модулю (в примере используется 5 В от Ardyino). Далее подключаем управляющие провода A1, A2, B1, B2 к цифровым выводам Arduino 10, 9, 6 и 5. Теперь, подключаем двигатели, один к клеммам MOTOR A , а другой к клемме MOTOR B. Принципиальная схема подключения приведена ниже.
Теперь подключаем Arduino к компьютеру и загружаем счет ниже.
Драйвер моторов MX1508

Драйвер двигателя, двухканальный H-мост на микросхеме MX1508 — это современный аналог мотор-драйверов L298N или L9110, но с усовершенствованными характеристиками и в более компактном исполнении. Мостовой драйвер может управлять двумя электродвигателями постоянного тока или одним биполярным шаговым двигателем. Встроенная в него защита от остановки моторов, увеличивает надежность, как самого драйвера так и подключенных к нему двигателей. Микросхема имеет встроенную тепловую защиту с автоматическим восстановлением по мере снижения температуры до рабочих величин. Драйвер меньше нагревается, за счет встроенных в мостовую схему MOSFET транзисторов с низким сопротивлением перехода. Вследствии чего, за счет этого достигается высокий КПД. Размеры платы ардуино драйвера моторов настолько малы, что его можно монтировать непосредственно на самом двигателе.
Характеристики драйвера двигателей постоянного тока:
| Напряжение питания | 2 — 10 В |
| Максимальный ток на канал | 1,5 А |
| Пиковый ток на канал | 2,5 А |
| Ток покоя | 0,1 мкА |
| Управляющее сигналы | 1,8 — 7 В |
| Защита от перегрева | Да |
| Защита от остановки двигателя | Да |
| Рабочая температура | -40 .. +80°C |
| Размеры платы | 25 x 21 мм |
При использовании следует проявить осторожность и помнить, что неправильное подключение полярностей напряжения питания, вызовет выход из строя микросхемы mx1508 модуля драйвера. При подключении напряжения питания выше 10В, неизбежно приведет к выходу из строя чипа. Короткое замыкание выхода, так же будет иметь печальные последствия.
AVRobot.RU
Модуль драйвера 1,5А (макс. 2.5А) для биполярного шагового двигателя на микросхеме MX1508 (современный аналог L298N или L9110 с защитными цепями в компактном исполнении)
Одним из ярких технологических прорывов последних лет стало появление 3D принтеров, способных «напечатать» из пластика практически любой твердотельный объект сложной формы. Построение таких принтеров стало хобби для многих людей. Одним из элементов таких 3D принтеров является шаговый двигатель, для управления которым требуется специальный драйвер.
- Драйвер для двигателя идеально подходит для использования в моделях машинок, игрушках, роботах и т. д. питаемых от батареек и аккумуляторов. Напряжение питания 2 В
10 В, драйвер может управлять двумя двигателями постоянного тока или 4-проводными двухфазными шаговыми двигателями, позволяет регулировать скорость вращения и менять направление вращения (реверс). Драйвер может обеспечить постоянный ток из 1.5A, пиковый ток до 2.5A, имеет блок тепловой защиты с автоматическим восстановлением.
Основные характеристики продукта:
- Используется импортный оригинальный чип MX1508, имеющий МОП ключи с низким сопротивлением, минимальное тепловыделение ,позволяющее использовать драйвер без радиаторов теплоотвода, маленький размер, низкое энергопотребление, благодаря чему идеально подходит в портативных устройствах для питания от аккумулятора.
- (Драйверы на устаревающем L298N имеют в качестве ключей — транзисторы, поэтому у них низкая эффективность, высокая температура при работе, необходимость использования теплоотвода, они громоздкие, микросхему L298N очень легко сжечь).
- Два канала по 1.5A, пиковый ток быть 2.5A, встроенный контур термозащиты, можно не переживать что драйвер выйдет из строя из-за перегрева, автоматическое восстановление после снижения температуры.
- Малый размер, легкий вес, ток менее 0,1 микроампера режиме ожидания, является идеальным выбором для вашей модели автомобиля.
- Двойной H-мостовой драйвер мотора, может управлять двумя двигателями постоянного тока или 4-проводным двухфазным шаговым двигателем.
- Напряжение питания модуля 2 В — 10 В.
- Входной сигнал напряжение 1.8 — 7 В.
- Рабочий ток 1.5A на канал, пиковый ток до 2.5A, низкий ток в режиме ожидания (менее 0.1uA).
- Встроенный в общих проводимости цепи, когда ввод pin оставляют плавающий, двигатель не неисправности.
- Встроенный контур термозащиты с гистерезисом (ТСД), не беспокойтесь о остановке двигателя.
- Размеры: 24.7*21*5 мм (длина, ширина, высота), ультра-маленький размер.
- Диаметр монтажного отверстия: 2 мм.
- 1. Неправильное подключение напряжения (переполюсовка) вызовет повреждения драйвера, соблюдайте полярность!
- 2. При замыкании выхода на землю или короткое замыкание выходной цепи (двигателя) может вызвать перегрев чипа, перенапряжение более 10 В или токи более чем 2.5A — могут привести к выходу из строя чипа.







