Микроконтроллерная система управления асинхронным трехфазным двигателем
В настоящее время практически 60% всей вырабатываемой электроэнергии потребляется электродвигателями. Поэтому достаточно остро стоит задача экономии электроэнергии и уменьшения стоимости электродвигателей.
Трехфазные асинхронные двигатели считаются достаточно универсальными и наиболее дешевыми, но подключать их к однофазной сети и управлять частотой вращения достаточно сложно.

Рис. 1. Числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц.
Заманчива перспектива увеличения номинальной частоты вращения двигателя в двое и более раз или использование малогабаритных двигателей, рассчитанных на частоту питающей сети 400. 1000 Гц и имеющихменьшую массу и стоимость. В данной радиолюбительской конструкции предпринята попытка решения проблемы.
Предлагаемая система управления работает от однофазной сети 220 В и позволяет плавно менять обороты двигателя и отображать частоту инвертора на двухразрядном цифровом индикаторе.
Дискретность изменения частоты инвертора составляет 1 Гц и регулируется в пределах от 1 до 99 Гц. В предлагаемой схеме используется числоимпульсный метод управления асинхронным двигателем с частотой модуляции 10 кГц (рис.1), позволяющий получать синусоидальный ток на обмотках двигателя.
Существует более перспективный, широтно-импульсный метод (ШИМ, PWM — англ.), использующий управление с обратными связями и без них, с частотами модуляции от 3 до 20 кГц и всевозможные методы коммутации, позволяющие увеличить выходное напряжение инвертора на 15.27% по сравнению с питающей сетью, т.е. до 354.390 В.
Принципиальная схема
Схема, показанная на рис.2, состоит из: управляющего устройства D2 (применен микроконтроллер PIC16F628-20/P, работающий на частоте 20 МГц), кнопок управления «Пуск» (SA1), «Стоп» (SA2), кнопок увеличения и уменьшения частоты SA3 и SA4 соответственно, двоично-семисегментного дешифратора D1, светодиодных матриц HG1 и HG2, узла торможения VT9, VT10, K1.
В силовой цепи используется трехфазный мостовой драйвер D4 IR2130 фирмы International Rectifier, имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления.

Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем.

Рис. 2. Принципиальная схема микроконтроллерного управления асинхронным трехфазным двигателем (продолжение).
Данная микросхема имеет систему защиты по току, которая в случае перегрузки выключает все ключи, а также предотвращает одновременное открывание верхних и нижних транзисторов, тем самым предотвращает протекание сквозных токов. Для сброса защиты необходимо установить все единицы на входах HNx, LNx. В качестве силовых ключей применены МОП-транзисторы IRF740.
Цепь перегрузки состоит из датчика тока R10, делителя напряжения R7R9, позволяющего точно установить ток срабатывания защиты, и интегрирующей цепочки R6C3, которая предотвращает ложное срабатывание токовой защиты в моменты коммутаций. Напряжение срабатывания защиты составляет 0,5 В по входу ITRP (D4).
После срабатывания защиты на выходе FAULT (открытый коллектор) появляется лог.»0″, зажигается светодиод HL1 и закрываются все силовые ключи.
Для более быстрой разрядки емкостей затворов силовых транзисторов можно установить параллельно резисторам, включенным в цепь затвора, диоды в обратном направлении. Двигатель необходимо включить по схеме звезды.
Источник питания состоит из мощных диодов VD11-VD14, токоограничительного резистора R20, фильтрующей емкости C10, емкости C11, предотвращающей всплески, которые возникают при коммутациях на паразитных индуктивностях схемы, а также маломощного трансформатора T1, стабилизатора напряжения 15 В D5 для питания схемы драйвера, стабилизатора напряжения 5 В D3 для питания микроконтроллера и схемы индикации.
При использовании более мощного двигателя вместо транзисторов IRF740 можно использовать IGBT-транзисторы типов IRGBC20KD2-S, IRGBC30KD2-S, при этом диоды VD7-VD10, VD15, VD16 следует выпаять. Конденсатор C11 типа К78-2 на напряжение 600. 1000 В. Вместо VD1-VD6 желательно применить сверхбыстрые диоды типа 10DF6, а емкости С15-С17 уменьшить до 2,2. 4,7 мкФ, которые должны быть рассчитаны на напряжение 50 В. Трансформатор T1 мощностью 0,5.2 Вт от калькулятора с перемотанной вторичной обмоткой. Обмотка намотана проводом 00,2 и должна выдавать 19.20 В.
Печатная плата и прошивка МК
Печатная плата (рис.3) выполнена из одностороннего стеклотекстолита, для того чтобы можно было воспользоваться утюго-лазерной технологией изготовления. Светодиод HL1, матрицы HG1, HG2, кнопки SA1-SA4 установлены со стороны дорожек.

Рис. 3. Печатная плата.
HEX-формат программы приведен в таблице. В момент записи в нулевую ячейку ОЗУ необходимо поместить шестнадцатеричное число от 1 до 63, начальная частота инвертора.

Коды для прошивки в текстовом формате: Скачать
Программа выполнена таким образом, что двигатель стартует с плавным набором скорости от 0 до установленной частоты примерно за 2 с (эта константа находится в ячейках 0207 и 0158 таблицы). Если нужно увеличить скорость нарастания в два раза, то вместо кодов 3005 необходимо записать 300A.
С.М. Абрамов, г. Оренбург, Россия. Электрик-2004-08.
- Козаченко В. Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам//СЫр№ш -1999. — №1.
- Обухов Д, Стенин С., Струнин Д, Фрадкин А. — Модуль управления электроприводом на микроконтроллере PIC16C62 и драйвере IR2131//ChipNews. — 1999. -№6.
Регулятор оборотов коллекторного микроэлектродвигателя для РУ модели
Желание собрать радиоуправление у меня созрело достаточно давно. Но дальше поиска схем, с последующим пониманием, что прошивку автор не даст, дело не продвинулось. В итоге, затея была похоронена в стадии развития. Но недавно мне на глаза попались модули, именуемые NRF24L01+ (стоит 0.6$ на Ali), и уже позабытое желание собрать радиоуправление загорелось с новой силой.
В конечном счете, была разработана схема радиоуправления, а так же несколько сопутствующих устройств. Об одном из них и пойдет речь в данной статье. К слову, в следующих статьях будет описано само радиоуправление, а так же зарядное устройство для li-ion аккумуляторов.
Регулятор оборотов двигателя — это название слышал любой моделист, а в особенности те, кто собирал авиа- и судомодели. Это устройство незаменимо, так как оно обеспечивает плавное управление скорость двигателя.
Существует множество вариантов исполнения таких регуляторов: на микроконтроллерах, на жесткой логике и даже на дискретных компонентах. После просмотра уже готовых схем, я понял что придется делать что-то свое — на логике собирать не хотелось, на дискретных компонентах выходило уж очень громоздко. Найденные схемы на микроконтроллерах были в общем-то неплохими, да вот только вариант собирать то, принцип действия чего я не смогу объяснить, меня не привлекал (а прошивку авторы выкладывать не спешили).
После всего этого и была разработана и собрана схема.
Итак, краткие характеристики (при номиналах деталей, указанных на схеме):
- Диапазон питающих напряжений: 7 . 35В
- Максимальный ток: 3А
- Длительность управляющего импульса: 1 . 2мс
- Рекомендованный период импульсов: 20мс
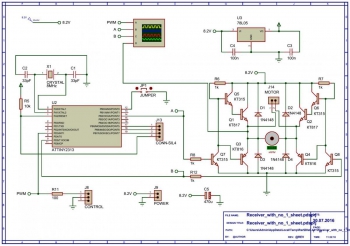
Силовая часть представляет собой Н-мост с дополнительными маломощными управляющими транзисторами. Управление оборотами двигателя производится ШИМ сигналом, генерируемым МК. Скважность ШИМ зависит от длительности импульса, поступающего на вход устройства.
Обработку сигналов и управление транзисторами в этой схеме выполняет микроконтроллер ATtiny2313. Этот выбор ничем не обусловлен, кроме того, что он у меня валялся под рукой на момент проектировки устройства. Изначально, в схеме планировалось использование полевых транзисторов, но позже я от них отказался в пользу более доступных советских биполярников (которых практически у каждого целый ящик). Конечно, это наложило свой отпечаток на параметры: максимальный ток значительно снизился, как и цена девайса.
Как уже упоминалось, напряжение питания устройства может варьироваться от 6 до 30 вольт. Это обусловлено границами напряжения, которое может выдержать интегральный стабилизатор LM7805, а так же двигатель (на него подается напряжение, отличное от питающего примерно на 1 вольт).
Максимальный ток зависит от применяемых транзисторов. В моем варианте — это КТ816/817, максимальный ток коллектора которых равен трем амперам.
В качестве маломощных управляющих транзисторов использованы распространенные КТ315.
Для более точного измерения длительности управляющего (серво) импульса был применен кварцевый резонатор на частоту 8МГц.
Диоды D1 — D4 желательно монтировать. Будет работать и без них, но вопрос в том, как долго.
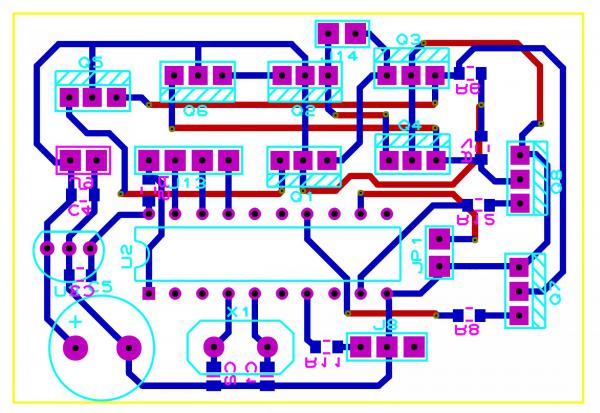
Печатная плата устройства выполнена на одностороннем фольгированном материале (стеклотекстолит, гетинакс). Дорожки выделенные красным — перемычки с лицевой стороны. В моем варианте транзисторы монтируются вне платы на радиаторе.
Печатная плата устройства (синие проводники — обратная сторона):
Принцип работы
При получении импульса, запускается 16 битный таймер, который останавливается по спаду импульса. Таймер настроен таким образом, что каждый его такт — это 1мкс, что позволяет упростить вычисления. После определения длительности импульса происходит сравнение с заданной величиной. Результат записывается в регистр OCR1A/B в зависимости от положения джампера и длительности импульса.
Исходный код приведен ниже. Так же его можно взять в приложении к статье.
В наладке устройство не нуждается, и должно работать сразу после правильной сборки и прошивки микроконтроллера. С последним будьте осторожны — не отключите ненароком бит RSTDISBL. Это может стоить вам нового микроконтроллера (если у вас конечно нет параллельного программатора).
Транзисторы КТ315 можно заменить любыми маломощными кремниевыми транзисторами структуры n-p-n. КТ816/817 — аналогичными по параметрам (или более мощными). К примеру, КТ818/819 и т.д. Резисторы можно заменить на аналогичные по мощности с допуском 20-30% от номинального сопротивления. Линейный стабилизатор LM7805 можно заменить на отечественный аналог КРЕН5А, а так же применить импульсный стабилизатор, но придется переработать печатную плату.
Фото , а так же видео работы устройства можно увидеть ниже.



Извиняюсь за не очень презентабельный вид платы — изначально это был тестовый вариант «на первое время». Но так как устройство с первого раза заработало так как от него требовалось, то «временный вариант» перерос в постоянный.
Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока
Большинство мировых производителей профессиональных угловых шлифовальных машинок (болгарок) таких как Bosch, Metabo, Makita, DeWalt и других используют два типа регуляторов оборотов с обратной связью.
С помощью таходатчика
На конце якоря мотора установлен кольцевой магнит с прорезью или срезом, а на плате регулятора установлена катушка индуктивности или датчик Холла. Такой регулятор обеспечивает максимально точную стабилизацию оборотов двигателя при изменении нагрузки.
На основе измерения падения напряжения на электродвигателе
В этом случае измеряется падение напряжения на двигателе, и схема управления изменяет длительность открытия силового ключа. Такой регулятор, если он правильно настроен, обеспечивает также хорошую стабилизацию оборотов двигателя при изменении нагрузки.
Все промышленные регуляторы, собранные на микроконтроллерах, полностью залитые эпоксидной смолой и в итоге они не пригодны для ремонта, а цена за новый регулятор достаточно большая, и составляет примерно 20-30% от стоимости самого электроинструмента.
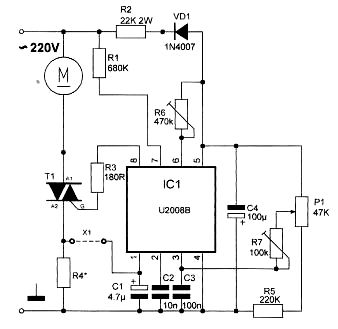
В поиске специализированных микросхем для решения данной задачи мне приглянулись регуляторы Phase Control фирмы Atmel. Например, простой вариант регулятора на микросхеме U2008B. Рассмотрим схему регулятора на ИМС U2008B приведенную на рис.1. В данном регуляторе можно использовать обратную связь по току или режим плавного пуска, однако в нём нет защиты от перегрузки. Если использовать плавный пуск тогда нужны только элементы С1, R4 и перемычку Х1 не ставим, а если нужна обратную связь — тогда все наоборот.
Так как ИMC U2008B не может одновременно работать в режиме плавного пуска и обратной связи, она не подходит для нашей задачи. На рис.2 показана схема регулятора на микросхеме U2010B, у которой есть обратная связь по току, защита от перегрузки и плавный старт одновременно. Светодиод D2 индицирует перегрузку электродвигателя. Переключатель SA1 «Mode» обеспечивает возможность выбора действий при перегрузке на двигателе в трех режимах: Положение А — индикация перегрузки и последующий сброс на минимальные обороты. Для восстановления рабочих оборотов, необходимо выключить инструмент.
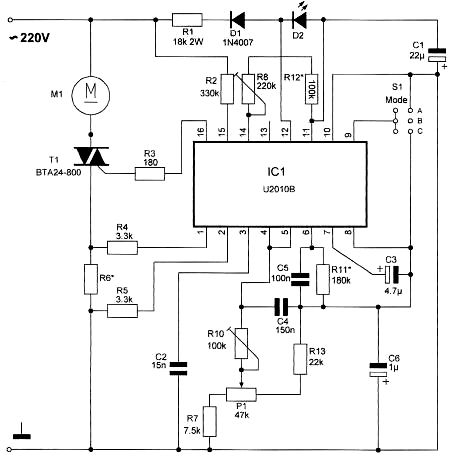
Положение В — индикация перегрузки, последующий сброс на минимальные обороты, после снятие нагрузки с инструмента, восстанавливаются установленные обороты, т.е. происходит авто старт.
Положение С — только индикация перегрузки, без остановки двигателя и защиты.
Подбором ёмкости конденсатора СЗ от 1 до 10 мкФ можно изменять длительность и плавность пуска двигателя.
Настройка регулятора.
В техническом описании к ИМС U2010B в схеме подключения обозначено только падение напряжение на R6 в 250 мВ и не указано, каким именно должен быть этот резистор.
Рассчитать сопротивление R6 можно исходя из мощности двигателя по формуле:
где:
UR6 — напряжение на R6 (250 мВ),
Рдвиг — мощность двигателя,
UПИТ — напряжение питания сети.
Например, для двигателя мощностью 750 Вт рассчитываем: R6= 0,25/(750/220) = 0,07 Ом.
Номиналы резисторов R6 и R11, в зависимости от мощности электродвигателя, приведены в таблице.
| R11 Мощность, Вт | R6*, Ом | Нихром, D 1 мм | Нихром, D 0,8 мм | R11*, кОм |
| 250 | 0,22 | 30 | 19 | 180-270 |
| 300 | 0,18 | 27 | 17 | 180-220 |
| 550 | 0,1 | 25 | 16 | 180 |
| 700 | 0,08 | 20 | 14 | 160 |
| 850 | 0,07 | 17 | 11 | 150 |
| 1000 | 0,055 | 15 | 10 | 100-120 |
| 1200 | 0,047 | 13 | 9 | 90-110 |
| 1500 | 0,04 | 12 | 8 | 80-100 |
| 1800 | 0,03 | 10 | 7 | 70-100 |
| 2000 | 0,028 | 8 | 6 | 65-90 |
| 2200 | 0,025 | 7 | 5 | 65-90 |
Главное правильно подбирать резистор R6 под мощность двигателя. Выше представленная формула правильная, но на практике может потребоваться некоторая коррекция по поведению двигателя под нагрузкой. Если резистор великоват, то двигатель довольно резко стартует (т.е. происходит большая компенсация нагрузки, чем надо), а потом отключается, а если резистор будет мал, то не будет обеспечиваться компенсация нагрузки.
В Datasheet к ИМС U2010B ёмкость конденсатора С2 указана 0,01 мкФ, но она рассчитана на 60-герцовую сеть, и при использования ИМС в сети 50 Гц за период выдавалось несколько импульсов управления. В итоге, обороты электродвигателя практически не регулировались и двигатель работал на полную мощность. Для сети с частотой 50 Гц нужно ёмкость конденсатора С2 увеличить до 0,015 мкФ.
Первый пуск
Переменный резистор Р1 (регулятор оборотов) нужно установить на минимальные обороты двигателя, по схеме движок потенциометра должен быть повернут в сторону резистора R13. Затем подстроенный резистор R10 (компенсация нагрузки) установить в среднее положение, а на место R11 (перегрузка) временно подпаять постоянный резистор сопротивлением 62 кОм. Потом включить регулятор в сеть 220 В / 50 Гц и подстроенным резистором R8 выставить самые минимальные обороты двигателя.
Нужно сделать так, чтобы при включении двигатель начинал вращаться на минимальных оборотах. Если настроить устройство так, чтобы совсем не было напряжения на электродвигателе, то тогда становится слишком нелинейная зависимость управления резистором Р1 — при его повороте сначала двигатель не крутится, а потом резко стартует без плавного пуска.
Далее нужно подключить вольтметр с диапазоном измерения 300 В к выводам двигателя, включить двигатель и на средних оборотах, зажимая вал или привод двигателя через тряпку рукой, выставить такое положение резистора R10, чтобы обороты электродвигателя не менялись при изменении нагрузки на его валу. Одновременно с этим нужно смотреть на вольтметр, подключенный к двигателю. При увеличении нагрузки на валу электродвигателя регулятор прибавляет напряжение, и двигатель крутится с одинаковыми оборотами, независимо от нагрузки.
И вот в последнюю очередь настраивается резистор R11 (перегрузка). Постоянный резистор номиналом 62 кОм выпаиваем и вместо него ставим подстроенный или переменный резистор номиналом 220 кОм. На оборотах двигателя чуть больше минимальных, сильно зажимая вал или привод двигателя, стараемся почти заклинить вал двигателя, и по степенно изменяем величину резистора R11, пока не начнет срабатывать защита, и не станет светиться VD2. Затем измерьте сопротивление переменного резистора тестером и запаяйте в устройство соответствующий резистор. В таблице указано приблизительные значения сопротивления R11,
Детали регулятора
Купить микросхемы U2008B, U2010B можно через сайт AliExpress (www.ru.aliexpress.com) в Китае с бесплатной доставкой на Украину, а далее посылка бесплатно отправляется через «Укрпочту» в любое почтовое отделение на территории Украины. Доставка на Украину производится на протяжении 25-40 дней. Например, цена 1 шт. микросхемы U2010B зависит от корпуса исполнения, примерно 0,9 USD в корпусе S016 и 1,2 USD в корпусе DIP16, а симистора ВТА24-800 — 0,4 USD.
Печатная плата устройства изготовлена из одностороннего фольгированного стеклотекстолита толщиной 1 мм.
Симистор VS1 лучше использовать с изолированной площадкой под радиатор серии ВТА, например BTA12-800, BTA16-800, BTA24-800, или применить другие. При мощности двигателя до 400 Вт, VS1 можно не устанавливать на радиатор. Все SMD детали типоразмера 1206, их можно запаять обычным паяльником с тонким жалом.
Подстроенные резисторы — типа СП3-19а или другой малогабаритный. Переменный резистор Р1 любой на 47-50 кОм, можно малогабаритные СП4-1, СП3-9. Резистор R1 мощностью не менее 2 Вт, например, типа MЛT-2 или др. Резистор R6 изготовлен из нихромовой проволоки диаметром 0,7 — 1 мм. Автор использовал нихромовый провод из старого блока сопротивлений для зажигания автомобилей ГАЗ с маркировкой 1402.3729. Все электролитические конденсаторы на напряжение не менее 50 В. Диод D1 — типа 1N4007 или КД208, также можно использовать диод в SMD исполнении. Светодиод D2 любой малогабаритний диаметром 3-5 мм красного света. Переключатель SA1 любой малогабаритный 3-х позиционный. Если нужен только один режим перегрузки, тогда вместо него можно установить перемычку.
Литература:
- Бирюков С. Автомат плавного пуска коллекторных электродвигателей. // Радио. — 1997. — №7. — С.40-42.
Печатная плата для схемы показанной на рисунке 2:
Автор: Валентин Шипляк, г. Ужгород







