Контроллер электрического двигателя схема
Дельта принтеры крайне требовательны к точности изготовления комплектующих (геометрия рамы, длины диагоналей, люфтам соединения диагоналей, эффектора и кареток) и всей геометрии принтера. Так же, если концевые выключатели (EndStop) расположены на разной высоте (или разный момент срабатывания в случае контактных концевиков), то высота по каждой из осей оказывается разная и мы получаем наклонную плоскость не совпадающая с плоскостью рабочего столика(стекла). Данные неточности могут быть исправлены либо механически (путем регулировки концевых выключателей по высоте), либо программно. Мы используем программный способ калибровки.
Далее будут рассмотрены основные настройки дельта принтера.
Для управления и настройки принтера мы используем программу Pronterface.
Калибровка принтера делится на три этапа:
1 Этап. Корректируем плоскость по трем точкам
Выставление в одну плоскость трех точек — A, B, C (расположенных рядом с тремя направляющими). По сути необходимо уточнить высоту от плоскости до концевых выключателей для каждой из осей.
Большинство (если не все) платы для управления трехмерным принтером (В нашем случае RAMPS 1.4) работают в декартовой системе координат, другими словами есть привод на оси: X, Y, Z.
В дельта принтере необходимо перейти от декартовых координат к полярным. Поэтому условимся, что подключенные к двигателям X, Y, Z соответствует осям A, B, C.(Против часовой стрелки начиная с любого двигателя, в нашем случае смотря на логотип слева — X-A, справа Y-B, дальний Z-C) Далее при слайсинге, печати и управлении принтером в ручном режиме, мы будем оперировать классической декартовой системой координат, электроника принтера сама будет пересчитывать данные в нужную ей систему. Это условность нам необходима для понятия принципа работы и непосредственной калибровки принтера. 
Точки, по которым мы будем производить калибровку назовем аналогично (A, B, C) и позиция этих точек равна A= X-52 Y-30; B= X+52 Y-30; C= X0 Y60. 
Алгоритм настройки:
- Подключаемся к принтеру. (В случае “крагозяб” в командной строке, необходимо сменить скорость COM порта. В нашем случае с 115200 на 250000 и переподключится)

После чего мы увидим все настройки принтера. - Обнуляем высоты осей X, Y, Z командой M666 x0 y0 z0.
И сохраняем изменения командой M500. После каждого изменения настроек необходимо нажать home (или команда g28), для того что бы принтер знал откуда брать отсчет. - Калибровка принтера производится “на горячую”, то есть должен быть включен подогрев стола (если имеется) и нагрев печатающей головки (HotEnd’а) (Стол 60град., сопло 185 град.) Так же нам понадобится щуп, желательно металлический, известных размеров. Для этих задач вполне подойдет шестигранный ключ (самый большой, в нашем случае 8мм, он предоставляется в комплекте с принтерами Prizm Pro и Prizm Mini)
- Опускаем печатающую головку на высоту (условно) 9мм (от стола, так, что бы сопло еле касалось нашего щупа, т.к. высота пока что не точно выставлена.) Команда: G1 Z9.
- Теперь приступаем непосредственно к настройке наших трех точек.
Для удобства можно вместо g- команд создать в Pronterface четыре кнопки, для перемещения печатающей головки в точки A, B, C, 0-ноль.


Далее командой меняем параметры высоты оси Y: M666 Y <посчитанная величина>
M666 Y0.75
M500
G28
2 Этап. Исправляем линзу
После того как мы выставили три точки в одну плоскость необходимо произвести коррекцию высоты центральной точки. Из за особенности механики дельты при перемещении печатающей головки между крайними точками в центре она может пройти либо ниже либо выше нашей плоскости, тем самым мы получаем не плоскость а линзу, либо вогнутую либо выпуклую. 
Корректируется этот параметр т.н. дельта радиусом, который подбирается экспериментально.
Калибровка:
- Отправляем головку на высоту щупа в любую из трех точек стола. Например G1 Z9 X-52 Y-30
- Сравниваем высоту центральной точки и высоту точек A,B,C. (Если высота точек A, B, C разная, необходимо вернутся к предыдущей калибровки.)
- Если высота центральной точки больше остальных, то линза выпуклая и необходимо увеличить значение дельта радиуса. Увеличивать или уменьшать желательно с шагом +-0,2мм, при необходимости уменьшить или увеличить шаг в зависимости от характера и величины искривления (подбирается экспериментально)
- Команды:
G666 R67,7
M500
G28 - Подгоняем дельта радиус пока наша плоскость не выровняется
3 Этап. Находим истинную высоту от сопла до столика
Третьим этапом мы подгоняем высоту печати (от сопла до нижней плоскости — столика) Так как мы считали, что общая высота заведомо не правильная, необходимо ее откорректировать, после всех настроек высот осей. Можно пойти двумя путями решения данной проблемы:
1 Способ:
Подогнав вручную наше сопло под щуп, так что бы оно свободно под ним проходило, но при этом не было ощутимого люфта,
- Командой M114 выводим на экран значение фактической высоты нашего HotEnd’а
- Командой M666 L получаем полное значение высоты (Параметр H)
- После чего вычитаем из полной высоты фактическую высоту.
- Получившееся значение вычитаем из высоты щупа.
Таким образом мы получаем величину недохода сопла до нижней плоскости, которое необходимо прибавить к полному значению высоты и и записать в память принтера командами:
G666 H 235.2
M500
G28
2 Способ:
Второй способ прост как валенок. С “потолка”, “на глаз” прибавляем значение высоты (после каждого изменение не забываем “уходить” в home), добиваясь необходимого значения высоты, но есть шанс переборщить со значениями и ваше сопло с хрустом шмякнется об стекло.
Как сделать авто калибровку для вашего принтера и что при этом авто калибрует принтер вы узнаете из следующих статей.
БЛОГ ЭЛЕКТРОМЕХАНИКА
Студенческий блог для электромеханика. Обучение и практика, новости науки и техники. В помощь студентам и специалистам
13.11.2014
Контроллерное управление электродвигателем
Контроллерное управление применяется главным образом для электродвигателей постоянного тока повторно-кратковременного режима работы. Оно предусматривает, помимо пуска и остановки также регулирование скорости вращения, изменение направления вращения (реверсирование) и торможение электродвигателя. Кроме того, при контроллерном управлении часто осуществляют защиту электродвигателей от ненормальных условий работы: перегрузки, понижения или исчезновения напряжения в питающей его сети. Такая защита достигается при помощи релейно-контакторной аппаратуры.
Релейно-контакторная аппаратура размещается на особой, так называемой защитной панели, встраиваемой в контроллер или монтируемой отдельно от него.
Регулирование скорости вращения электродвигателя постоянного тока при контроллерном управлении чаще всего осуществляется при помощи сопротивлений, включаемых в цепь якоря.
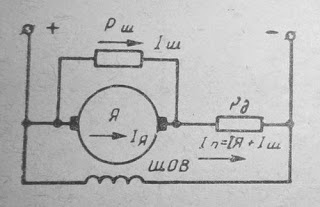

Иногда при малых нагрузках падение напряжения на зажимах последовательно включенного сопротивления оказывается недостаточным для получения низкой скорости вращения электродвигателя. В этом случае, кроме последовательного сопротивления, применяют еще сопротивление, подключаемое параллельно цепи якоря (рис. 1).
Низкая устойчивая скорость вращения электродвигателя («ползучая» скорость) получается потому, что в этом случае падение напряжения на зажимах якоря обусловливается не только током якоря, а суммой токов, проходящих по якорю Iя и по параллельно включенному сопротивлению Iш.
Довольно часто в схемах контроллерного управления применяют комбинированный способ регулирования скорости вращения: понижение номинальной скорости достигается введением сопротивления в цепь якоря, а повышение — введением сопротивления в цепь параллельной обмотки возбуждения.
Изменение направления вращения электродвигателей обычно достигается изменением направления тока в цепи якоря.
Электрическое торможение двигателя осуществляется одним из трех способов. Рекуперативное торможение чаще всего предусматривается в схемах управления грузовыми лебедками. При опускании тяжелого груза его вес может разогнать электродвигатель до скорости, превышающей скорость вращения холостого хода. Так как обмотка возбуждения электродвигателя включена на полное напряжение сети, то противоэлектродвижущая сила двигателя становится выше приложенного напряжения и электродвигатель начинает отдавать энергию в сеть, в связи с чем он и затормаживается. Никаких специальных переключений схемы в режиме рекуперативного торможения в этом случае не требуется, и оно осуществляется автоматически, когда скорость вращения двигателя увеличивается сверх допустимой.
Для динамического торможения якорь электродвигателя отключается от питающей сети и замыкается на сопротивление торможения (рис. 2).
При этом у электродвигателя параллельного возбуждения обмотка возбуждения остается включенной на полное напряжение сети (рис. 2, а), а у электродвигателя последовательного возбуждения эта обмотка отключается от якоря и получает питание от сети через добавочное сопротивление (рис. 2, б).
У электродвигателей смешанного возбуждения динамическое торможение осуществляется при отключенной последовательной обмотке и при питании параллельной обмотки возбуждения от полного напряжения сети. При динамическом торможении направление тока в якоре электродвигателя меняется на обратное, так как напряжение сети равно нулю.
Эффективность динамического торможения зависит от величины тормозного сопротивления. Чем это сопротивление меньше, тем больше ток, отдаваемый якорем, и тем быстрее двигатель останавливается. Однако по мере уменьшения скорости вращения ток, отдаваемый электродвигателем, уменьшается и эффективность торможения снижается.
Торможение противотоком производится изменением полярности приложенного к якорю двигателя напряжения. При этом двигатель в момент остановки отключается от сети, так как иначе он начнет вращаться в противоположную сторону. Следовательно, торможение противотоком имеет место у каждого реверсируемого электродвигателя, если реверс производится до остановки двигателя.
При торможении противотоком знак э. д. с. электродвигателя остается прежним, а знак приложенного напряжения меняется и совпадает со знаком э. д. с. Поэтому величина тока, проходящего через якорь электродвигателя, увеличивается почти вдвое против имеющей место при нормальном пуске, даже в случае наличия в цепи якоря (в момент торможения противотоком) пускового сопротивления.
На рис. 3 изображена схема контроллерного управления электродвигателем параллельного возбуждения. Схема предусматривает пуск, реверсирование и торможение электродвигателя. При включении рубильника Р в нулевом положении контроллера обмотка возбуждения электродвигателя подключается на полное напряжение сети.
В положении контроллера «I вперед» ток от зажима плюс сети через контакты 10 и 9 контроллера проходит через якорь и дополнительные полюсы электродвигателя; далее через искрогасительную катушку ИК, контакты 1 и 2 контроллера ток, пройдя все пускорегулирующее сопротивление P1 — P4, через зажимы 6,8 и 7 возвращается в минус сети. Электродвигатель начинает вращаться с наименьшим числом оборотов.

В положении контроллера «II вперед» из цепи выводится сопротивление P1, вследствие чего электродвигатель увеличивает скорость вращения.
В последующих положениях («III, IV и V вперед») поочередно выводятся сопротивления Р2, Р3, P4 и якорь электродвигателя, подключенный на полное напряжение сети, развивает номинальную скорость вращения. При повороте маховика контроллера из положения «V вперед» в нулевое якорь электродвигателя отсоединяется от сети и подключается на тормозное сопротивление СТ. Так как обмотка возбуждения осталась включенной, электродвигатель переходит в режим динамического торможения.
При повороте маховика контроллера в положение «I назад» ток от зажима + (плюс) сети через контакты контроллера 10, 11, 8 и 6 проходит через пускорегулирующее сопротивление в направлении от P4 к P1; затем через контакты 2, 1, через катушку ИК, дополнительные полюсы, через якорь электродвигателя, зажимы 9 и 7 контроллера ток возвращается в — (минус) сети.
Таким образом, ток в якоре изменяет направление, что при неизменном направлении потока влечет реверс электродвигателя.
Если из положения «V назад» (или V вперед») перевести маховик контроллера в положение «I вперед» (или «I назад»), не дожидаясь остановки электродвигателя при нулевом положении контроллера, то начинается торможение электродвигателя противотоком через пусковое сопротивление P1— P4.
Сопротивление PC, включенное параллельно обмотке возбуждения, служит для ее защиты от повышения напряжения при выключении рубильника Р.







