Контроллер для мотор колеса своими руками схема
Дельта принтеры крайне требовательны к точности изготовления комплектующих (геометрия рамы, длины диагоналей, люфтам соединения диагоналей, эффектора и кареток) и всей геометрии принтера. Так же, если концевые выключатели (EndStop) расположены на разной высоте (или разный момент срабатывания в случае контактных концевиков), то высота по каждой из осей оказывается разная и мы получаем наклонную плоскость не совпадающая с плоскостью рабочего столика(стекла). Данные неточности могут быть исправлены либо механически (путем регулировки концевых выключателей по высоте), либо программно. Мы используем программный способ калибровки.
Далее будут рассмотрены основные настройки дельта принтера.
Для управления и настройки принтера мы используем программу Pronterface.
Калибровка принтера делится на три этапа:
1 Этап. Корректируем плоскость по трем точкам
Выставление в одну плоскость трех точек — A, B, C (расположенных рядом с тремя направляющими). По сути необходимо уточнить высоту от плоскости до концевых выключателей для каждой из осей.
Большинство (если не все) платы для управления трехмерным принтером (В нашем случае RAMPS 1.4) работают в декартовой системе координат, другими словами есть привод на оси: X, Y, Z.
В дельта принтере необходимо перейти от декартовых координат к полярным. Поэтому условимся, что подключенные к двигателям X, Y, Z соответствует осям A, B, C.(Против часовой стрелки начиная с любого двигателя, в нашем случае смотря на логотип слева — X-A, справа Y-B, дальний Z-C) Далее при слайсинге, печати и управлении принтером в ручном режиме, мы будем оперировать классической декартовой системой координат, электроника принтера сама будет пересчитывать данные в нужную ей систему. Это условность нам необходима для понятия принципа работы и непосредственной калибровки принтера. 
Точки, по которым мы будем производить калибровку назовем аналогично (A, B, C) и позиция этих точек равна A= X-52 Y-30; B= X+52 Y-30; C= X0 Y60. 
Алгоритм настройки:
- Подключаемся к принтеру. (В случае “крагозяб” в командной строке, необходимо сменить скорость COM порта. В нашем случае с 115200 на 250000 и переподключится)

После чего мы увидим все настройки принтера. - Обнуляем высоты осей X, Y, Z командой M666 x0 y0 z0.
И сохраняем изменения командой M500. После каждого изменения настроек необходимо нажать home (или команда g28), для того что бы принтер знал откуда брать отсчет. - Калибровка принтера производится “на горячую”, то есть должен быть включен подогрев стола (если имеется) и нагрев печатающей головки (HotEnd’а) (Стол 60град., сопло 185 град.) Так же нам понадобится щуп, желательно металлический, известных размеров. Для этих задач вполне подойдет шестигранный ключ (самый большой, в нашем случае 8мм, он предоставляется в комплекте с принтерами Prizm Pro и Prizm Mini)
- Опускаем печатающую головку на высоту (условно) 9мм (от стола, так, что бы сопло еле касалось нашего щупа, т.к. высота пока что не точно выставлена.) Команда: G1 Z9.
- Теперь приступаем непосредственно к настройке наших трех точек.
Для удобства можно вместо g- команд создать в Pronterface четыре кнопки, для перемещения печатающей головки в точки A, B, C, 0-ноль.


Далее командой меняем параметры высоты оси Y: M666 Y <посчитанная величина>
M666 Y0.75
M500
G28
2 Этап. Исправляем линзу
После того как мы выставили три точки в одну плоскость необходимо произвести коррекцию высоты центральной точки. Из за особенности механики дельты при перемещении печатающей головки между крайними точками в центре она может пройти либо ниже либо выше нашей плоскости, тем самым мы получаем не плоскость а линзу, либо вогнутую либо выпуклую. 
Корректируется этот параметр т.н. дельта радиусом, который подбирается экспериментально.
Калибровка:
- Отправляем головку на высоту щупа в любую из трех точек стола. Например G1 Z9 X-52 Y-30
- Сравниваем высоту центральной точки и высоту точек A,B,C. (Если высота точек A, B, C разная, необходимо вернутся к предыдущей калибровки.)
- Если высота центральной точки больше остальных, то линза выпуклая и необходимо увеличить значение дельта радиуса. Увеличивать или уменьшать желательно с шагом +-0,2мм, при необходимости уменьшить или увеличить шаг в зависимости от характера и величины искривления (подбирается экспериментально)
- Команды:
G666 R67,7
M500
G28 - Подгоняем дельта радиус пока наша плоскость не выровняется
3 Этап. Находим истинную высоту от сопла до столика
Третьим этапом мы подгоняем высоту печати (от сопла до нижней плоскости — столика) Так как мы считали, что общая высота заведомо не правильная, необходимо ее откорректировать, после всех настроек высот осей. Можно пойти двумя путями решения данной проблемы:
1 Способ:
Подогнав вручную наше сопло под щуп, так что бы оно свободно под ним проходило, но при этом не было ощутимого люфта,
- Командой M114 выводим на экран значение фактической высоты нашего HotEnd’а
- Командой M666 L получаем полное значение высоты (Параметр H)
- После чего вычитаем из полной высоты фактическую высоту.
- Получившееся значение вычитаем из высоты щупа.
Таким образом мы получаем величину недохода сопла до нижней плоскости, которое необходимо прибавить к полному значению высоты и и записать в память принтера командами:
G666 H 235.2
M500
G28
2 Способ:
Второй способ прост как валенок. С “потолка”, “на глаз” прибавляем значение высоты (после каждого изменение не забываем “уходить” в home), добиваясь необходимого значения высоты, но есть шанс переборщить со значениями и ваше сопло с хрустом шмякнется об стекло.
Как сделать авто калибровку для вашего принтера и что при этом авто калибрует принтер вы узнаете из следующих статей.
Электровелосипед своими руками: контроллер
Как выбрать контроллер для электровелосипеда, какие контроллеры бывают и в чём их разница?
Прежде чем ответить на этот вопрос, давайте разберёмся, зачем вообще нужен контроллер.
Для чего электровелосипеду контроллер
Наверняка почти каждый любознательный представитель мужской половины человечества в детстве имел дело с моторчиками, установленными в детских игрушках, например, электрических машинках или лодках.
Эти моторчики представляли собой двигатели постоянного тока. Для вращения к ним достаточно было подключить батарейку, и направление вращения менялось в зависимости от полярности подключения.
В том случае обмотки ротора (вращающейся части электродвигателя) подключаются к источнику питания по очереди через пару графитовых щёток, таким образом ротор приводится во вращение.
В электровелосипедах же используются бесщёточные моторы, а точнее трёхфазные асинхронные двигатели, которым недостаточно просто подать напряжение питания от батареи. На первый взгляд кажется, что всё только усложнилось, но дело вот в чём.
Во-первых, двигатели постоянного тока имеют узел, который требует обслуживания и периодического ремонта — это как раз те самые щётки и коллектор, по которому они скользят.
Во-вторых, КПД этих двигателей ниже, а вес больше. В третьих, они имеют ограниченный диапазон скоростей вращения. Всех этих недостатков трёхфазные асинхронные двигатели лишены.
Но последним требуется контроллер — устройство, обеспечивающее коммутацию обмоток строго по определённому алгоритму.
В зависимости от типа двигателя (с датчиками положения ротора или без) от контроллера к двигателю идёт либо только три силовых провода, либо к ним добавляются 5 или 6 тонких проводов.
Силовые провода — это те, которые непосредственно подключены к обмоткам двигателя. А тонкие (слаботочные) провода — это провода питания и сигналов с датчиков положения.
На фото силовые провода (синий, зелёный и жёлтый) спрятаны в стеклоармированных трубках, а слаботочные видны: синий, зелёный и жёлтый — это сигналы с датчиков положения, красный и чёрный — это питание датчиков, а белый — с датчика температуры, который спрятан под платой ближе к обмоткам.
ШИМ-регулятор скорости для самодельного электровелосипеда







Ранее мастер работал над преобразованием своего велосипеда в электрический, используя двигатель постоянного тока для автоматического механизма двери. Также им была создана аккумуляторная батарея, рассчитанная на 84 В постоянного тока.
Теперь ему требуется регулятор скорости, который может ограничивать количество энергии, подводимой к двигателю от аккумуляторной батареи. Большинство доступных в сети регуляторов скорости не рассчитаны на такое высокое напряжение, поэтому было решено сделать его самому.
В данном проекте будет спроектирован и построен индивидуальный ШИМ-регулятор скорости для управления скоростью крупномасштабных двигателей постоянного тока.
Шаг 1: Инструменты и материалы
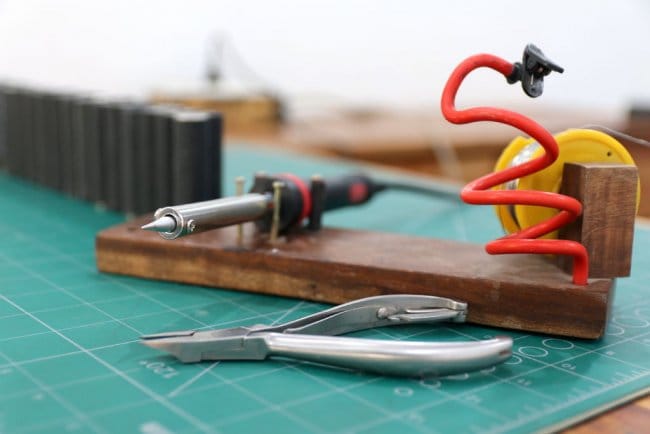




Для этого проекта понадобятся базовые инструменты для пайки, такие как:
— Паяльник;
— отсос припоя;
— Плоскогубцы;
Схема, файлы Gerber и список компонентов доступны здесь .
Шаг 2: Проектирование контроллера скорости

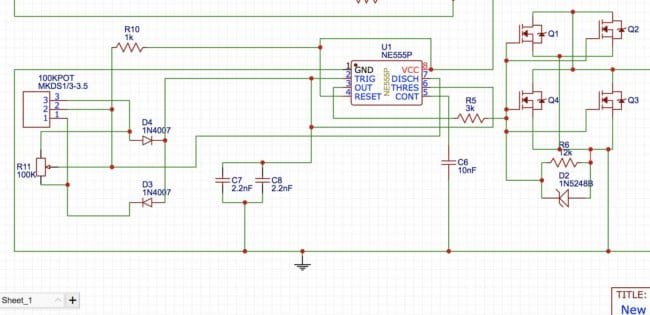

Так как мы стремимся контролировать скорость двигателя постоянного тока, то мы можем использовать две технологии. Понижающий преобразователь, который понижает входное напряжение, довольно сложен, поэтому было решено использовать PWM Control (Pulse Width Modulation). Подход прост, чтобы контролировать скорость питания батареи, он включается и выключается с высокой частотой. Для изменения скорости движения велосипеда изменяется рабочий цикл или период времени выключения контроллера.
В настоящее время механические переключатели не должны подвергаться такому высокому напряжению, поэтому подходящим выбором для такого применения является N-канальный Mosfet, который специально предназначен для обработки умеренного количества тока на высокой частоте.
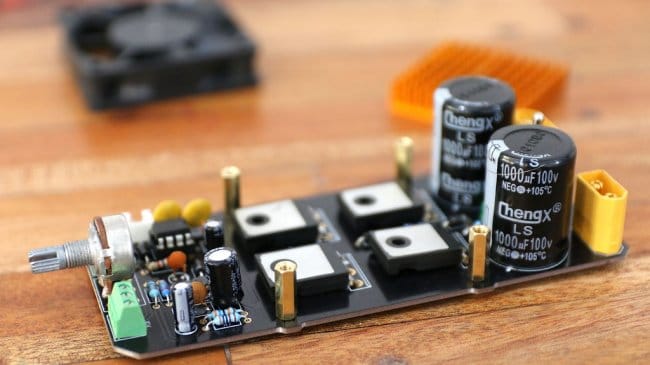
Для переключения полушарий необходим сигнал ШИМ, который вырабатывается ИС таймером 555, а рабочий цикл сигнала переключения изменяется с помощью потенциометра 100 кОм.
Так как мы не можем работать с таймером 555 выше 15 В, придется включить интегральную микросхему преобразователя lm5008, которая понижает входное напряжение с 84 В до 10 В постоянного тока, который используется для питания таймера и охлаждающего вентилятора.
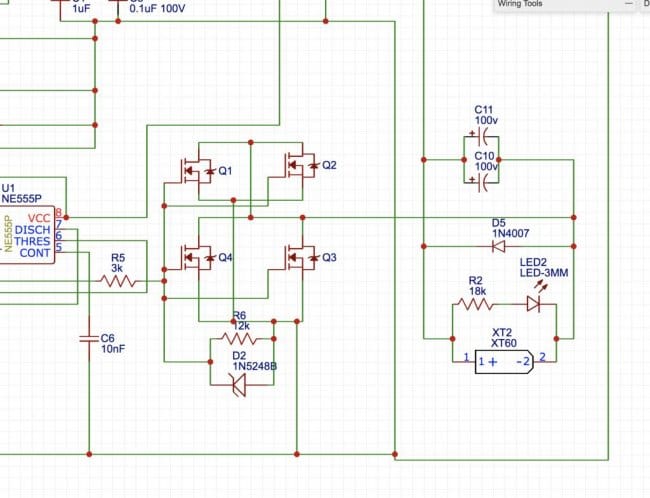
Для обработки большого количества тока было использовано четыре N-канальных Mosfets, которые подключены параллельно.
Кроме того, были добавлены все дополнительные компоненты, как описано в таблицах данных.
Шаг 3: Проектирование печатных плат

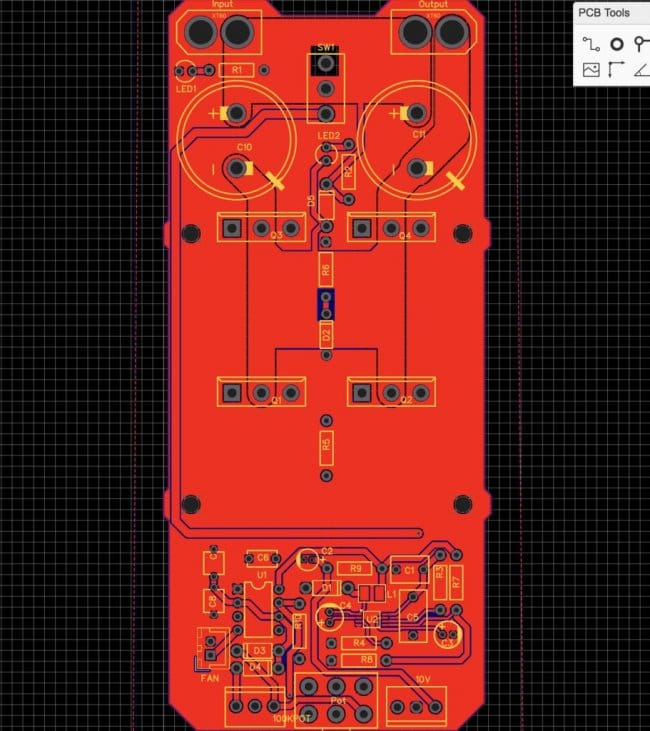

Закончив схему, было решено заняться разработкой специальной печатной платы для регулятора скорости. Было решено спроектировать это устройство так, чтобы оно было способно к дальнейшим модификациям для других DIY-проектов мастера, которые используют большие двигатели постоянного тока.
Идея проектирования печатной платы, возможно, требует больших усилий, но оно того стоит. Всегда старайтесь проектировать определенные модули на плате с другой стороны. К таким модулям относятся схема управления и питание. Это делается для того, чтобы при соединении всего вместе можно было выбирать подходящую ширину печатной дорожки, особенно на стороне питания.
Также было добавлено четыре монтажных отверстия, которые будут полезны для монтажа контроллера и удержания вентилятора вместе с радиатором над полевыми МОП-транзисторами.
Шаг 4: Заказ печатных плат



В отличие от любой другой заказной детали для DIY-проекта, печатные платы, безусловно, самые легкие. Как только файлы Gerber для окончательной компоновки печатной платы были готовы, осталось сделать несколько кликов для заказа специализированных печатных плат.
Все, что сделал мастер этого проекта, так это отправился на PCBWAY и загрузил свои файлы Gerber. После того, как их техническая команда проверит дизайн на наличие ошибок, дизайн будет отправлен на производственную линию. Весь процесс займет два дня и печатные платы придут по указанному адресу в течение недели.
Файлы Gerber, схема и спецификация для печатной платы регулятора скорости доступны здесь .
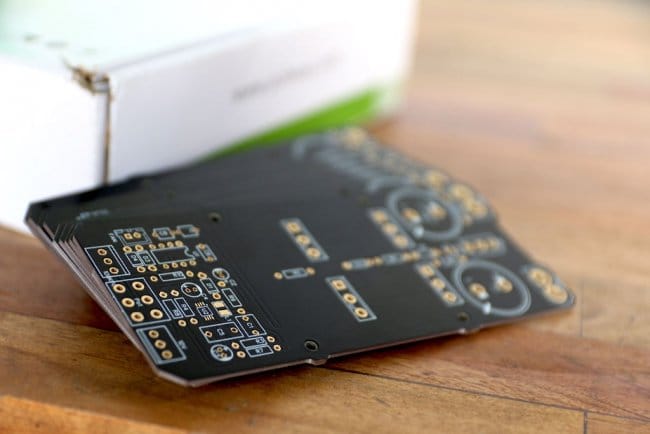
Шаг 5: Сборка печатных плат

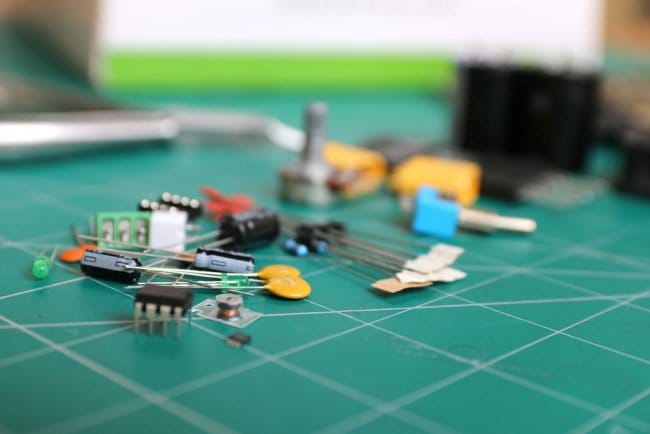

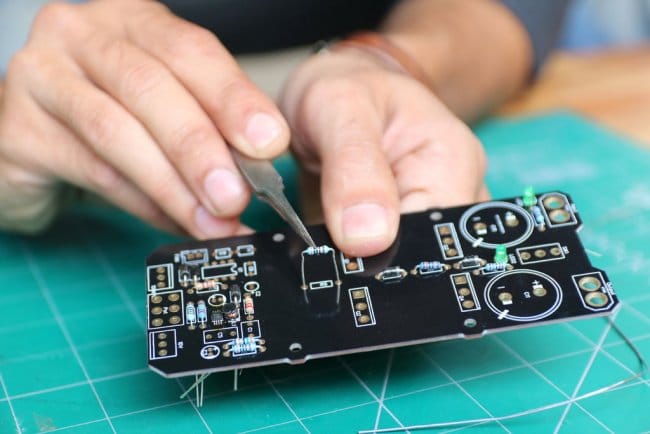





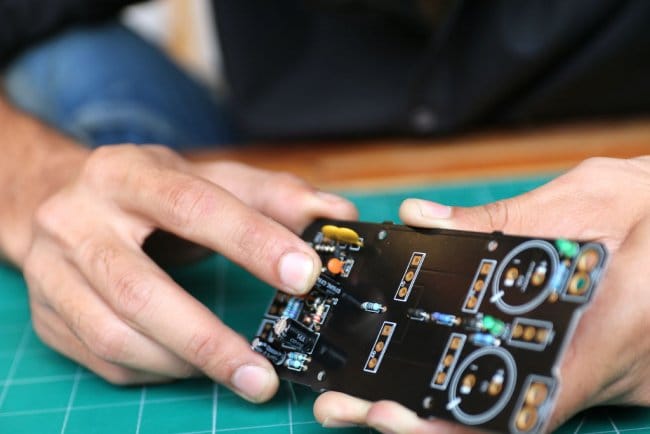







Как и ожидалось, печатные платы прибыли в течение недели. Качество печатных плат абсолютно безупречное. Пришло время собрать все компоненты, как указано в спецификации, и поместить их на место.
Чтобы все шло гладко, нужно начать с самого маленького компонента на печатной плате, который в нашем случае является преобразователем LM5008 Buck, компонентом SMP. Как только компоненты были припаяны, согласно схемы, мастер приступил к работе с более крупными компонентами.
После сборки платы, пришло время расположить таймер 555 с выемкой в правильном направлении.
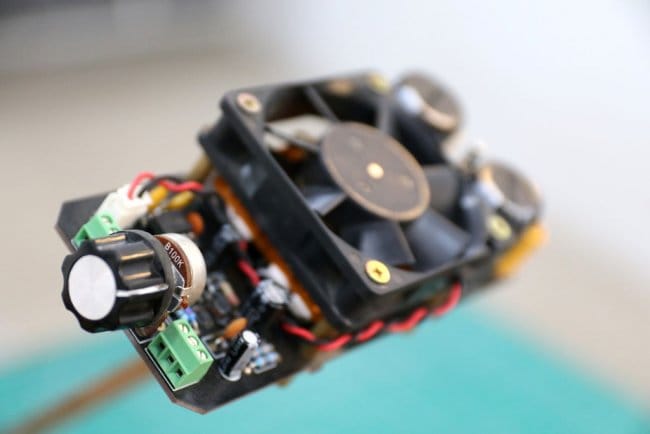
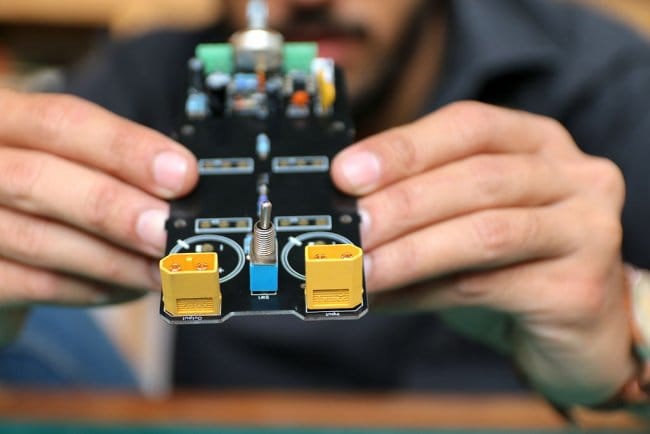
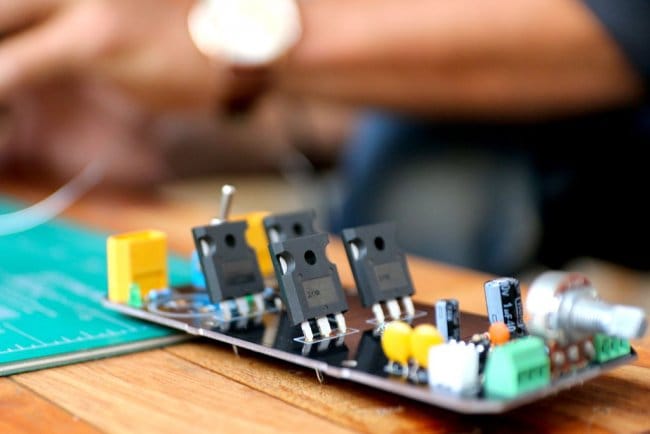
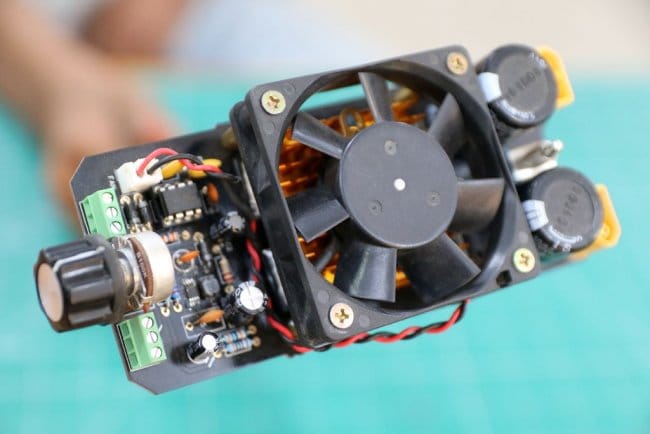
Шаг 6: Охлаждение

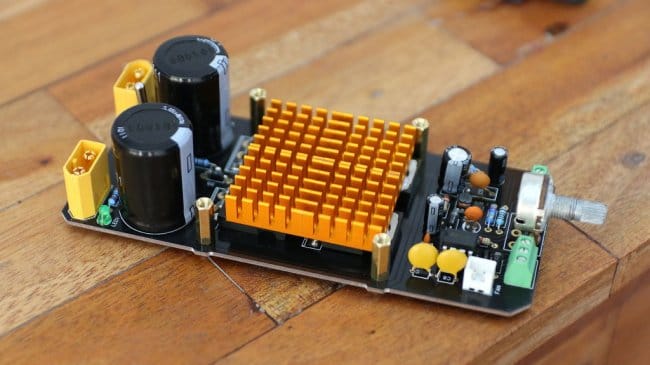

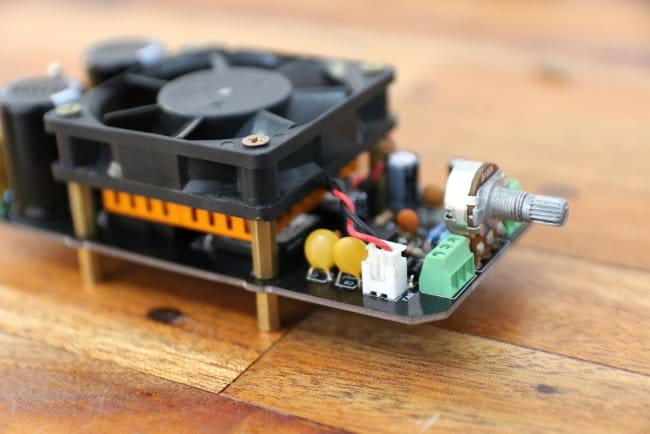

С таким огромным количеством энергии, с которым потребуется иметь дело, очевидно, что плата будет нагреваться. Поэтому, чтобы справиться с избытком тепла, необходимо согнуть полевые МОП-транзисторы и установить вентилятор на 12 В с переключателем между радиаторами.
После этого ШИМ-регулятор скорости готов к работе.
Шаг 7: Тестирование контроллера




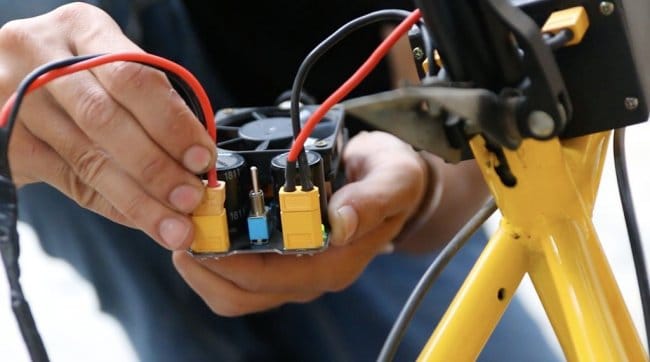


Для тестирования контроллера будет использована аккумуляторная батарея на 84 В для электрического велосипеда, которая была изготовлена мастером ранее. Контроллер временно подключен к аккумуляторной батарее и мотору, который прикреплен к велосипеду для привода заднего колеса.
После переключения переключателя, контроллер включается и вентилятор обдувает воздухом полевые МОП-транзисторы. При вращении потенциометра по часовой стрелке, двигатель начинает вращаться и постепенно увеличивает скорость, пропорционально вращению ручки.
Шаг 8: Окончательные результаты






Регулятор скорости готов и он превзошел все ожидания мастера в отношении его возможностей. Контроллер легко работает от аккумуляторной батареи 84 В и плавно контролирует скорость двигателя.
Но чтобы протестировать этот регулятор скорости под нагрузкой, мастеру необходимо закончить свой велосипедный проект и смонтировать все компоненты вместе.
Также вы можете посмотреть видео по сборке данного контроллера:







