Асинхронные исполнительные двигатели
Асинхронные исполнительные двигатели используют в системах автоматического управления для управления и регулирования различных устройств.
Асинхронные исполнительные двигатели начинают действовать при подаче им электрического сигнала, который они преобразуют в заданный угол поворота вала или в его вращение. Снятие сигнала приводит к немедленному переходу ротора исполнительного двигателя в неподвижное состояние без использования каких-либо тормозных устройств. Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки.
По конструктивному оформлению исполнительные двигатели представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл. град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначение ми C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления U у (рис. 1, а, б, в).
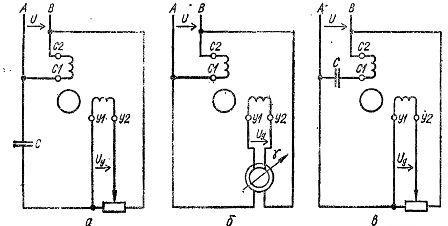
Рис. 1. Схемы включения асинхронных исполнительных двигателей при управлении: а — амплитудном, б — фазовом, в — амплитудно-фазовом.
В результате этого в обеих фазах обмотки статора возникают соответствующие токи, которые благодаря включенным фазосдвигающим элементам в виде конденсаторов или фазорегулятора сдвинуты относительно друг друга во времени, что приводит к возбуждению эллиптического вращающего магнитного поля, которое вовлекает короткозамкнутый ротор во вращение.
 При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
Пуск, регулирование скорости и остановка исполнительных двигателей определяются условиями формирования магнитного поля путем амплитудного, фазового и амплитудно-фазового управления.
При амплитудном управлении напряжение U на зажимах обмотки возбуждения поддерживают неизменным, а изменяют только амплитуду напряжения Uy. Сдвиг фаз между этими напряжениями, благодари исключенному конденсатору, равен 90° (рис. 1, а).
Фазовое управление харакрно тем, что напряжения U и Uy остаются неизменными, а сдвиг фаз между ними регулируют поворотом ротора фазорегулятора (рис. 1, б).
При амплитудно-фазовом управлении, хотя регулируют только амплитуду напряжения Uy, но при этом, из-за наличия конденсатора в цепи возбуждения и электромагнитного взаимодействия фаз обмотки статора, происходит одновременное изменение фазы напряжения на зажимах обмотки возбуждения и сдвига фаз между этим напряжением и напряжением на зажимах обмотки управления (рис. 1, в).
Иногда кроме конденсатора в цепи обмотки возбуждения предусматривают еще конденсатор в цепи обмотки управления, что компенсирует реактивную намагничивающую мощность, снижает потери энергии и улучшает, механические характеристики асинхронного исполнительного двигателя.
При амплитудном управлении круговое вращающееся магнитное поле наблюдается при номинальном сигнале независимо от скорости ротора, а при уменьшении его оно становится эллиптическим. В случае фазового управления круговое вращающееся магнитное поле возбуждается только при номинальном сигнале и сдвиге фаз между напряжениями U и Uy равным 90° независимо от скорости ротора, а при ином сдвиге фаз оно становится эллиптическим. При амплитудно-фазовом управлении круговое вращающееся магнитное поле существует только при одном режиме — при номинальном сигнале в момент пуска двигателя, а затем по мере разгона ротора оно переходит в эллиптическое.
При всех способах управления скорость ротора регулируют изменением характера вращающегося магнитного поля, а перемену направления вращения ротора осуществляют изменением фазы напряжения, подведенного к зажимам обмотки управления, на 180°.
 К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
Самоход асинхронных исполнительных двигателей проявляется в виде самопроизвольного вращения ротора при отсутствии сигнала управления. Он обусловлен либо недостаточно большим активным сопротивлением обмотки ротора — методический самоход, либо некачественным исполнением самого двигателя — технологический самоход.
Первый устраним при проектировании двигателей, предусматривающем изготовление ротора с повышенным сопротивлением обмотки и критическим скольжением sкр = 2 — 4, что, кроме того, обеспечивает широкий устойчивый диапазон регулирования скорости ротора, а второй — качественным изготовлением магнитопроводов и обмоток машин при тщательной их сборке.
Так как асинхронные исполнительные двигатели с ротором, имеющим короткозамкнутую обмотку с повышенным активным сопротивлением, отличаются небольшим быстродействием, характеризуемым электромеханической постоянной времени — временем набора ротором скорости от нулевой до половины синхронной — Тм = 0,2 — 1,5 с, то в установках автоматического управления предпочтение отдают исполнительным двигателям с полым немагнитным ротором, у которых электромеханическая постоянная времени имеет меньшее значение — Тм = 0,01 — 0,15 с.
Асинхронные исполнительные двигатели с полым немагнитным ротором, отличающиеся высоким быстродействием, имеют как внешний статор с магнитопроводом обычной конструкции и двухфазной обмоткой с фазами, выполняющими роль обмоток возбуждения и управления, так и внутренний статор в виде шихтованного ферромагнитного полого цилиндра, укрепленного на подшипниковом щите двигателя.
Поверхности статоров разделены воздушным зазором, который в радиальном направлении имеет размер 0,4 — 1,5 мм. В воздушном зазоре находится стакан из алюминиевого сплава со стенкой толщиной 0,2 — 1 мм, укрепленный на валу двигателя. Ток холостого хода асинхронных двигателей с полым немагнитным ротором велик и доходит до 0,9 I ном, а номинальный кпд = 0,2 — 0,4.
В установках автоматики и телемеханики применяют двигатели с полым ферромагнитным ротором, у которого толщина стенки 0.5 — 3 мм. В этих машинах, используемых в качестве исполнительных и вспомогательных двигателей, внутренний статор отсутствует, а ротор укреплен на одной запрессованной или двух торцовых металлических пробках.
 Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 — 0,3 мм.
Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 — 0,3 мм.
Механические характеристики двигателей с полым ферромагнитным ротором ближе к линейным, чем характеристики двигателей с ротором, имеющим обычную короткозамкнутую обмотку, а также с ротором, выполненным в виде полого немагнитного цилиндра.
Иногда внешнюю поверхность полого ферромагнитного ротора покрывают слоем меди толщиной 0,05 — 0,10 мм, а его торцовые поверхности — слоем меди до 1 мм для увеличения номинальных мощности и момента двигателя, однако кпд его при этом несколько уменьшается.
Существенными недостатками двигателей с полым ферромагнитным ротором является одностороннее прилипание ротора к магнитопроводу статора из-за неравномерности воздушного зазора, чего не бывает в машинах с полым немагнитным ротором. Самоход у двигателей с полым ферромагнитным ротором отсутствует, они устойчиво работают в диапазоне скоростей от нулевой до синхронной скорости ротора.
Асинхронные исполнительные двигатели с массивным ферромагнитным ротором выполненным в виде стального или чугуного цилиндра без обмотки, отличаю простотой конструкции, высокой прочностью, большим пусковым моментом, устойчивостью работы на заданной скорости и могут быть использованы при очень высоких скоростях ротора.
Существуют обращенные двигатели с массивным ферромагнитным ротором, который выполнен в вид наружной вращающейся части.
Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
Читайте также: Сельсины: назначение, устройство, принцип действия
Конструкции асинхронных исполнительных двигателей
Асинхронные исполнительные двигатели выпускаются следующих видов:
1) с полым немагнитным ротором; 2) с полым ферромагнитным ротором; 3) с короткозамкнутым ротором типа «беличья клетка».
Асинхронные исполнительные двигатели с полым немагнитным ротором. Сегодня это, пожалуй, самые распространенные асинхронные исполнительные двигатели. Они применяются в различных системах автоматического управления и выпускаются целым рядом заводов. Их мощности – от десятых долей ватта до сотен ватт. Они рассчитываются на промышленную частоту (50 Гц) и на повышенные частоты (200, 400, 500 Гц). Угловые скорости вращения колеблются от 1500 до 30000 об/мин.
Одна из конструктивных схем двигателя с полым немагнитным ротором представлена на рис. 1.17. Двигатель состоит из внешнего статора 1 с обмотками возбуждения и управления; внутреннего статора–сердечника 2 без обмоток, служащего лишь для уменьшения магнитного сопротивления на пути главного потока; полого немагнитного ротора 3, выполненного из материала с высоким удельным сопротивлением (чаще всего из сплавов алюминия). Толщина стенок ротора составляет 0,1–1 мм. Весьма небольшая масса ротора делает его малоинерционным, что придает двигателю очень ценные свойства. Между стенками ротора и обоими статорами выполняются воздушные зазоры, величина
которых обычно не превосходит 0,15–0,25 мм. Однако, эти зазоры вместе c немагнитным ротором создают большие немагнитные промежутки между внешним и внутренним статорами, что приводит к большим намагничивающим токам, достигающим 90 % от номинального значения.

Рис. 1.17. Асинхронный исполнительный двигатель с полым немагнитным ротором
Двигатели мощностью 0,1–5 Вт изготавливают несколько иначе. Поскольку такие двигатели имеют малые внутренние диаметры, то для облегчения укладки обмоток их размещают в пазах внутреннего статора, а внешний делают без обмоток. Правда, это приводит к некоторому увеличению диаметра ротора, а следовательно и его момента инерции. Для устранения последнего недостатка иногда используют третью конструкцию: одну из обмоток размещают на внутреннем, а другую – на внешнем статоре.
Достоинства двигателей с полым немагнитным ротором.
1) Малый момент инерции, что в совокупности со значительным пусковым моментом обеспечивает высокое быстродействие. Электромеханические постоянные времени большинства их них лежат в пределах: 0,01–0,1 с. при
f = 50 Гц и 0,02–0,15 с. при f = 400 Гц.
2) Сравнительно хорошая линейность механических и регулировочных характеристик, чему в известной мере способствуют весьма незначительные индуктивные сопротивления немагнитного ротора [xр = (0,05–0,1)rр].
3) Высокая чувствительность – малое напряжение трогания, что объясняется малым моментом инерции и отсутствием односторонних сил магнитного притяжения, поскольку ротор выполнен из немагнитного материала.
Недостатки двигателей с полым немагнитным ротором.
1) Низкие энергетические показатели, что объясняется большими намагничивающими токами, приводящими к значительным потерям в обмотках.
2) Большие габариты и масса, обусловленные первым недостатком.
Асинхронные исполнительные двигатели с полым немагнитным ротором выпускаются сериями АДП, ДИД, ЭМ. Как правило, первая серия предназначена для устройств наземной автоматики, вторая – для авиационной и космической техники, а третья – для средств вычислительной техники.
Асинхронные исполнительные двигатели с полым ферромагнитным ротором. В отличии от двигателей первого типа ротор этого двигателя выполняется из магнитного материала с толщиной стенок 0,3–3 мм, поэтому здесь отсутствует внутренний статор. Воздушный зазор небольшой (0,2–0,3 мм). Однако намагничивающий ток (  ) этого двигателя практически мало отличается от двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
) этого двигателя практически мало отличается от двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
Двигатель имеет большой момент инерции и небольшой пусковой момент, что значительно ухудшает его быстродействие. Приемы, связанные с омеднением ротора с целью увеличения пускового момента, оказались малоэффективными. Существенным недостатком являются большие силы одностороннего магнитного притяжения, приводящие порой к залипанию ротора и отказам в работе. В целом эти двигатели значительно уступают двигателям с полым немагнитным ротором, поэтому они не получили широкого распространения.
Асинхронные двигатели с короткозамкнутым ротором выпускаются обычного исполнения и специальной, так называемой «сквозной» конструкции.
Первые отличаются от силовых машин только повышенным активным сопротивлением ротора и используются в тех установках, где требования высокого быстродействия не играют существенной роли. Вторые имеют оригинальную конструкцию, суть которой состоит в том, что диаметр расточки статора  равен наружному диаметру подшипника
равен наружному диаметру подшипника  (рис. 1.18) Такая конструкция позволяет проводить окончательную обработку (шлифовку) внутренней поверхности статора и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на статоре. Обычно лобовые части покрывают специальным компаундом для предохранения их от металлической стружки.
(рис. 1.18) Такая конструкция позволяет проводить окончательную обработку (шлифовку) внутренней поверхности статора и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на статоре. Обычно лобовые части покрывают специальным компаундом для предохранения их от металлической стружки.

Рис. 1.18. Асинхронный исполнительный двигатель «сквозной» конструкции
«Сквозная» конструкция позволяет получать воздушные зазоры в 0,03–0,05 мм, что на уменьшения момента инерции их выполняют с малым диаметром и увеличенной длиной ротора. Обычно  .
.
Малые воздушные зазоры резко уменьшают намагничивающий ток, увеличивают КПД,  , вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
, вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
Поворотные трансформаторы. Общие положения
Поворотными (вращающимися) трансформаторами называются небольшие индукционные машины, преобразующие угол поворота ротора в напряжение, пропорциональное либо самому углу, либо его функции.
Различают: 1) синусно–косинусные поворотные трансформаторы (СКПТ), которые выдают два напряжения, изменяющиеся по гармоническому закону  и
и 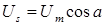 ; 2)линейные поворотные трансформаторы (ЛПТ), выходное напряжение которых изменяется по закону
; 2)линейные поворотные трансформаторы (ЛПТ), выходное напряжение которых изменяется по закону  .
.
Рис.6.1. Условная схема поворотного трансформатора
Поворотные трансформаторы (ПТ) состоят из статора и ротора, в пазах которых уложено по две взаимно перпендикулярных обмотки (рис.6.1). Одну из статорных обмоток называют обмоткой возбуждения – В, другую – компенсационной– К. Обмотки ротора носят названия синусной – S и косинусной– C. Параметры статорных обмоток полностью идентичны друг другу. Тоже самое справедливо и для роторных обмоток.
ПТ относятся к электрическим машинам высокой точности. Достаточно сказать, что изменение взаимной индуктивности между статором и ротором должно отличаться от гармонического закона не более чем на 0,05%.
Потребляемая поворотными трансформаторами мощность составляет несколько вольт–ампер при напряжении до 115 В и частоте 50, 400 и 2500 Гц.







