Способы возбуждения машин постоянного тока и их классификация
 Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено.
Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника — сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах регулирования скорости вращения двигателей, которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0—1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
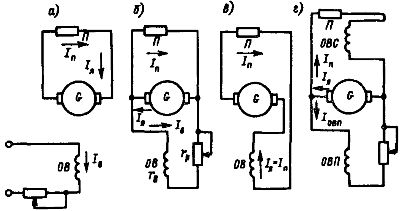
Рис. 1. Схемы генераторов постоянного тока: а — с независимым возбуждением; б — с параллельным возбуждением; в — с последовательным возбуждением; г — со смешанным возбуждением П — потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения — параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов. Двигатели постоянного тока большой мощности выполняются обычно с независимым возбуждением . У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
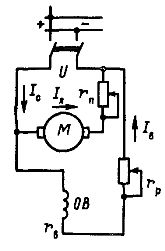
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Двигатели смешанного возбуждения из-за наличия последовательной обмотки в некоторой мере имеют свойства двигателей последовательного возбуждения. В настоящее время они практически не применяются. Двигатели параллельного возбуждения иногда выполняются со стабилизирующей (последовательной) обмоткой, включаемой согласно с параллельной обмоткой возбуждения, для обеспечения более спокойной работы при пиках нагрузки. МДС такой стабилизирующей обмотки невелика — единицы процентов от основной МДС.
Классификация машин постоянного тока по способу возбуждения




![]()
![]()
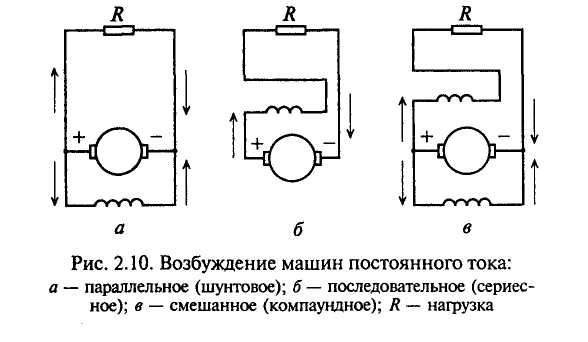
Рабочие свойства машин постоянного тока зависят в значительной мере от способа соединения обмотки возбуждения с якорем машины. По способу питания обмотки возбуждения машины постоянного тока подразделяются: на машины с параллельным возбуждением (шунтовые), машины с последовательным возбуждением (сериесные) и машины со смешанным возбуждением (компаундные) (рис. 2.10). Машины с параллельным и смешанным возбуждением применяют в качестве, как генераторов, так и двигателей, с последовательным возбуждением — только в качестве двигателей.
В машинах с параллельным возбуждением обмотка возбуждения присоединяется параллельно обмотке якоря (рис. 2.10, а), в машинах с последовательным возбуждением — последовательно с обмоткой якоря (рис.2.10, б). В машинах со смешанным возбуждением обмотка возбуждения имеет две части: одну, соединенную параллельно, а другую — последовательно с обмоткой якоря (рис. 2.10, в). Обмотки возбуждения, присоединяемые параллельно, выполняют из проводов небольшого сечения; обмотки же, присоединяемые последовательно, рассчитываемые на прохождение че-рез них полного тока генератора, выполняют из проводов большого сечения.
 ЭДС, которую развивает любой генератор постоянного тока, прямо пропорциональна числу его оборотов и величине магнитного потока, создаваемого полюсами. Магнитный же поток зависит от тока в обмотке возбуждения. Регулирование ЭДС генератора постоянного тока может осуществляться изменением либо числа его оборотов, либо величины тока возбуждения:
ЭДС, которую развивает любой генератор постоянного тока, прямо пропорциональна числу его оборотов и величине магнитного потока, создаваемого полюсами. Магнитный же поток зависит от тока в обмотке возбуждения. Регулирование ЭДС генератора постоянного тока может осуществляться изменением либо числа его оборотов, либо величины тока возбуждения:

где р — число пар полюсов; N — число всех проводников обмотки; а — число параллельных ветвей; Ф — магнитный поток обмотки возбуждения (Вб); п — частота вращения якоря, мин» 1 .
2.7. Электродвигатели постоянного тока
Величина вращающегося момента двигателя постоянного тока (М) выражается следующим соотношением:
где к — постоянная двигателя, зависящая от его конструкции; Ф — магнитный поток, Вб; /я — сила тока якоря, А. Скорость двигателя подчиняется уравнению

где Rя — сопротивление обмотки якоря, Ом.
Двигатель параллельного возбуждения, схема включения которого приведена на (рис. 2.11), о, присоединяется к сети так, чтобы обмотка возбуждения всегда находилась под полным напряжением сети. Поэтому магнитный поток двигателя остается постоянным, не зависящим от нагрузки, а сила тока в обмотке якоря возрастает пропорционально нагрузке. Из формулы (2.8) видно, что вращающий момент двигателя также возрастает пропорционально нагрузке. Скорость вращения уменьшается по формуле (2.9) незначительно.
 Регулирование скорости вращения, как показывает формула (2.9),
Регулирование скорости вращения, как показывает формула (2.9),
постигается изменением напряжения, подводимого к двигателю; введением сопротивления в цепь якоря или изменением магнитного потока. Введение сопротивления в цепь якоря вызывает уменьшение скорости двигателя; регулирование скорости происходит при постоянном моменте. Этот способ применяется для подъемников, лебедок, поршневых компрессоров, насосов и т. д. Однако он связан со значительными потерями, обусловленными нагревом добавочного сопротивления, через которое протекает весь ток якоря. Наибольшее распространение имеет регулирование частоты вращения двигателя изменением магнитного потока. Это достигается реостатом, включенным в обмотку возбуждения. При уменьшении силы тока возбуждения уменьшается магнитный поток, а следовательно, увеличивается частота вращения двигателя. В этом случае регулирование происходит при постоянной мощности. Включение реостата в цепь обмотки возбуждения не вызывает значительных потерь энергии благодаря небольшому значению силы тока возбуждения. В двигателе параллельного возбуждения обмотка возбуждения имеет большое сопротивление и, следовательно, сила тока в этой обмотке и в реостате невелика.
Электродвигатель с последовательным возбуждением включают в сеть по схеме, изображенной на рис. 2.11, б. Своими характеристиками двигатели последовательного возбуждения значительно отличаются от двигателей параллельного возбуждения. Вследствие того, что через обмотку возбуждения двигателя, последовательно соединенную с обмоткой якоря, проходит весь его ток, одновременно с увеличением нагрузки двигателя резко возрастает величина магнитного потока его полюсов. Также резко падает число его оборотов, которое, как уже отмечалось, изменяется обратно пропорционально магнитному потоку. В связи с этим такие двигатели, uo-первых, развивают большой вращающийся момент при малых оборотах (в частности, при пуске в ход) и, во-вторых, обладают большой перегрузочной способностью. Вместе с тем, с уменьшением нагрузки на валу частота вращения двигателя быстро возрастает и при малых нагрузках (меньше 1/4 нормальной), он приобретает скорость, опасную для его целостности. Вхолостую, т. е. без нагрузки, сериесные электродвигатели вообще нельзя пускать — они идут, как принято говорить, на «разнос». Это является отрицательным свойством сериесного электродвигателя.

По своим характеристикам эти электродвигатели больше всего подходят для привода подъемно-транспортных устройств. Их широко применяют в электрической тяге (трамваи, троллейбусы, электрические железные дороги).
В строительной практике двигатели последовательного возбуждения применяют на некоторых типах мощных экскаваторов с питанием от двигатель-генераторов и на электрических погрузчиках с питанием от аккумуляторов.
Регулирование скорости двигателей последовательного возбуждения принципиально не отличается от двигателей с параллельным возбуждением, только значение силы тока в обмотке возбуждения или якоря изменяется не реостатом, а их шунтированием — отводом части тока от этих обмоток.
Для изменения направления вращения двигателей постоянного тока (реверсирование) необходимо изменить полярность магнитного поля или направление силы тока в обмотке якоря. Эту операцию выполняют переключением соответствующих обмоток — якоря или возбуждения.
Классификация машин постоянного тока
Машины постоянного тока (двигатели и генераторы) различают по способу включения обмоток главных полюсов или возбуждения в сеть (рис. 5.3):
машины постоянного тока с независимым возбуждением (рис. 5.3, а), электрическая цепь обмотки возбуждения является независимой от силовой цепи ротора; для генераторов это практический единственный вариант схемного решения;
машины постоянного тока с параллельным возбуждением (рис. 5.3, б), обмотка возбуждения включается параллельно с цепью якоря;
машины постоянного тока с последовательным возбуждением (рис. 5.3, в) обмотка статора включается последовательно с обмоткой ротора, что обуславливает зависимость магнитного потока от тока якоря; на практике такой способ возбуждения используются редко;
машины постоянного тока со смешанным возбуждением (рис. 5.3, г), присутствуют две обмотки возбуждения: параллельно и последовательно включенные с цепью якоря.
На рисунках сплошные стрелки показывают направления токов в режиме генератора, штриховые — в режиме двигателя.
Р ис. 5.3
ис. 5.3
Принцип работы двигателя постоянного тока
Принцип действия двигателя параллельного возбуждения рассмотрим по схеме (рис. 5.4), где
N, S – главные полюса,
Ф – основной магнитный поток,
Фп – поперечный магнитный поток двигателя,
Iя – ток якорной цепи, Iв – ток возбуждения,
F – электромагнитные силы,
Мэ – электромагнитный вращающий момент,
Мс – момент сопротивления приводного механизма,
ω – угловая частота вращения якоря,
U – напряжение источника питания двигателя,
Е – противо-ЭДС обмотки якоря.
– противо-ЭДС обмотки якоря.
К цепи обмотки возбуждения и якорной цепи подведено напряжение U от одного источника постоянного тока.
Под воздействием этого напряжения в обмотке возбуждения проходит ток Iв, создающий постоянную намагничивающую силу Iвwв, которая возбуждает неподвижный в пространстве основной магнитный поток Ф, направление которого зависит от направления тока в обмотке возбуждения. Направление магнитного потока определяется правилом правоходового винта: вращательное движение винта направляют по току в обмотке возбуждения, тогда поступательное движение винта покажет направление магнитного потока. Полярность главных полюсов N, S зависит от направления магнитного потока..
В якорной цепи двигателя проходит ток Iя. Щетками, прижимаемыми к коллектору, обмотка якоря делится на параллельные ветви. Число пар щеток (+, – ) равно числу пар главных полюсов p.
Секция обмотки якоря укладывается в пазы сердечника якоря таким образом, чтобы ее активные проводники находились под разноименными полюсами. Поэтому, если в верхнем активном проводнике, расположенном под северным полюсом (рис. 5.4), ток направлен от переднего торца якоря к заднему (обозначен крестиком), то в нижнем проводнике этой секции, расположенном под южным полюсом, ток направлен в обратную сторону (обозначен точкой). Следовательно, во всех проводниках, расположенных под одним полюсом, направление токов одинаково.
Н а проводники с током, находящиеся в магнитном поле, действуют электромагнитные силы, направление которых определяются правилом левой руки: левая рука располагается так (рис. 5.5, б), чтобы линии магнитного поля входили в ладонь, четыре пальца направляются по току в проводнике, тогда большой палец, отогнутый на 90 градусов, покажет направление силы.
а проводники с током, находящиеся в магнитном поле, действуют электромагнитные силы, направление которых определяются правилом левой руки: левая рука располагается так (рис. 5.5, б), чтобы линии магнитного поля входили в ладонь, четыре пальца направляются по току в проводнике, тогда большой палец, отогнутый на 90 градусов, покажет направление силы.
При указанном направлении тока в обмотке якоря и полярности полюсов (рис. 5.4) электромагнитные силы F, приложенные к верхним и нижним проводникам, создают электромагнитный момент, который вращает якорь в направлении против движения часовой стрелки со скоростью n, об/мин.
П ри вращении якоря активные проводники обмотки меняют свое расположение, переходя от одного полюса под другой, проходя через геометрическую нейтраль — линию, проведенную через щетки (рис. 5.4).
ри вращении якоря активные проводники обмотки меняют свое расположение, переходя от одного полюса под другой, проходя через геометрическую нейтраль — линию, проведенную через щетки (рис. 5.4).
В результате воздействия магнитного поля двигателя на все проводники с током возникают электромагнитные силы, которые создают электромагнитный вращающий момент
где  – конструктивная постоянная машины, зависящая от числа пар полюсовp, числа активных проводников N, числа пар параллельных ветвей а обмотки якоря.
– конструктивная постоянная машины, зависящая от числа пар полюсовp, числа активных проводников N, числа пар параллельных ветвей а обмотки якоря.
При вращении якоря проводники его обмотки пересекают основной магнитный поток и в них на основании закона электромагнитной индукции индуцируется ЭДС. Ее направление определяется правилом правой руки: правая рука располагается так (рис. 5.5,а), чтобы линии магнитного поля входили в ладонь, большой палец, отогнутый на 90 градусов, направляется в сторону перемещения проводника, тогда четыре пальца покажут направление ЭДС.
На рис. 5.4 направление ЭДС обозначено точками и крестиками около проводников обмотки якоря. Видно, что направления этих ЭДС противоположно направлению тока в обмотке, поэтому их называют противоЭДС. Величина ЭДС
где  — конструктивная постоянная машины.
— конструктивная постоянная машины.
Ток в проводниках обмотки якоря образует магнитное поле якоря, направление которого определяется правилом правоходового винта. При указанных направлениях тока магнитный поток этого поля Фп направлен перпендикулярно основному (продольному) потоку Ф. Поэтому он называется поперечным.
При взаимодействии двух полей результирующее магнитное поле искажается. Под сбегающими краями главных полюсов магнитные потоки направлены встречно и результирующее магнитное поле ослабляется, а под набегающими – усиливаются, так как потоки направлены одинаково.
Д ля компенсации поперечного магнитного поля применяют дополнительные полюсаNд, Sд, обмотки которых включены последовательно с обмоткой якоря. Магнитный поток дополнительных полюсов направлен встречно потоку поперечного поля. и пропорциональны ему. Поэтому независимо от режима работы двигателя магнитный поток дополнительных полюсов всегда будет компенсировать магнитный поток поперечного поля.
ля компенсации поперечного магнитного поля применяют дополнительные полюсаNд, Sд, обмотки которых включены последовательно с обмоткой якоря. Магнитный поток дополнительных полюсов направлен встречно потоку поперечного поля. и пропорциональны ему. Поэтому независимо от режима работы двигателя магнитный поток дополнительных полюсов всегда будет компенсировать магнитный поток поперечного поля.
На рис. 5.6 изображена схема замещения якорной цепи двигателя постоянного тока, где RЯ – сопротивление обмотки якоря.
В соответствии со вторым законом Кирхгофа:

Тогда уравнение электрического состояния якорной цепи двигателя постоянного тока имеет вид:
Ток якорной обмотки  .
.
В режиме холостого хода (при отсутствии нагрузки на валу двигателя) якорь вращается с максимальной скоростью n0. ЭДС Ея имеет максимальное значение, ток якоря Iя= Iях незначителен, как видно из формулы. Момент М0, развиваемый двигателем в режиме холостого хода, равен моменту инерции двигателя.
При увеличении нагрузки на валу скорость двигателя n уменьшается и уменьшается величина противоЭДС Ея. Тогда увеличиваются ток якорной обмотки и момент развиваемый двигателем Мвр=М0+Мс, где Мс — момент нагрузки на валу двигателя.







