- Кинематика автомобиля
- Аспекты, требующие особой внимательности
- Максимальное срезание траектории и ее особенности
- О практике грамотного прохождения поворотов
- 1 ) Кинематика поворота: условие обеспечения единого центра поворота для всех колес двухосного автомобиля.
- 2) Эластичное колесо как направляющий элемент автомобиля: виды деформации, влияние на деформацию конструктивных и эксплуатационных факторов.
- 4.5.3. Кинематика поворота автомобиля с эластичными колесами
- 4.5.4. Поворачиваемость атс
- 4.6. Устойчивость атс
- Кинематика поворота автомобиля с жесткими колесами
Кинематика автомобиля


Кинематика касается вопросов движения тел в пространстве, и для автомобилистов этот раздел механики имеет огромное значение. Не секрет, что при прохождении поворотов у водителей зачастую возникают проблемы с выбором траектории движения транспортного средства, которые могут повлечь за собой самые негативные последствия. Именно поэтому следует уделить кинематике поворотов самое пристальное внимание
Аспекты, требующие особой внимательности
Понимание принципов движения колес автомобиля в повороте позволяет грамотно выполнять водителю все необходимые маневры даже в проблемных местах. Для наглядности можно выехать на участок дороги, на котором следы от колес будут хорошо заметны.
 Сначала следует двигаться по прямой, а потом, вывернув колеса до упора, описать дугу. На прямом участке будут хорошо видны две полосы, а после начала поворота их окажется уже четыре. При этом задние колеса оставят следы ближе к центру поворота, а передние — ближе к его наружной части.
Сначала следует двигаться по прямой, а потом, вывернув колеса до упора, описать дугу. На прямом участке будут хорошо видны две полосы, а после начала поворота их окажется уже четыре. При этом задние колеса оставят следы ближе к центру поворота, а передние — ближе к его наружной части.
Чтобы понять суть такой картины, следует обратить внимание на такие аспекты:
- в начале движения передние колеса неизбежно уведут в сторону переднюю часть автомобиля;
- корпус машины начнет двигаться под углом относительно своего первоначального местоположения;
- в силу жесткого расположения относительно корпуса машины его задних колес, двигаться по аналогичной траектории начнут и они;
- задние колеса не будут идти по прямой вплоть до того места, где осуществят поворот передние;
- в повороте из-за этого движение автомобиля происходит полубоком, поэтому и появляются четыре следа от колес.
Такая особенность движения машины может стать причиной наезда на препятствия задними колесами или столкновения с различными объектами.
Максимальное срезание траектории и ее особенности
В процессе такого маневрирования водителю нельзя акцентировать внимание только на передней части автомобиля. У задних колес получается срезанная траектория, и разница между их следами и следами передних колес зависит от двух моментов:
- от угла поворота, совершаемого передними колесами;
- от расстояния между автомобильными осями (база).
 При повороте колес до упора получается максимальное срезание траектории. Оно выражается в расстоянии между следами при выкручивании колес до упора. Зная это расстояние, водитель может рассчитать эту траекторию и, основываясь на имеющейся информации, выполнить необходимый ему маневр при подъезде к препятствию:
При повороте колес до упора получается максимальное срезание траектории. Оно выражается в расстоянии между следами при выкручивании колес до упора. Зная это расстояние, водитель может рассчитать эту траекторию и, основываясь на имеющейся информации, выполнить необходимый ему маневр при подъезде к препятствию:
- если расстояние до объекта больше максимального срезания траектории – поворачивать колеса следует после его достижения передними колесами;
- если расстояние до объекта меньше максимального срезания траектории, – либо идти по прямой, либо не выворачивать колеса до упора;
- если до объекта практически не осталось места для маневра, поворот следует делать только по достижении препятствия осью задних колес.
Чем больше база, тем больше траектория срезания, поэтому у длинных и габаритных машин при прохождении поворота передние колеса зачастую выходят на встречную полосу, а задние соприкасаются с обочиной.
 У автомобилей с большим задним свесом, когда имеется большое расстояние от задней оси до заднего габарита, встречается и другая проблема – при выполнении поворота идет выворачивание корпуса машины под определенным углом. При таком маневре корпуса вся передняя часть автомобиля уходит в сторону поворота, а задняя – в противоположную.
У автомобилей с большим задним свесом, когда имеется большое расстояние от задней оси до заднего габарита, встречается и другая проблема – при выполнении поворота идет выворачивание корпуса машины под определенным углом. При таком маневре корпуса вся передняя часть автомобиля уходит в сторону поворота, а задняя – в противоположную.
Если, к примеру, большой автобус совершает такой поворот, а рядом с ним находится легковой автомобиль, то задняя часть автобуса в ходе поворота неизбежно заденет его. Отсюда и четкое правило – никогда не следует вплотную прижиматься к габаритным транспортным средствам.
О практике грамотного прохождения поворотов
Попрактиковаться с прохождением поворотов можно, объезжая какой-нибудь статичный объект, например, столб или дерево. Схема поворота в этом случае следующая:
- сначала можно вплотную прижаться к объекту левым боком и совершить левый же поворот в тот момент, когда его оси достигли задние колеса;
- потом следует заранее просчитать боковое расстояние до объекта, которое больше максимальной траектории, после чего при достижении нужного места передними колесами можно совершать поворот.
Заранее выполнить расчет бокового расстояния до объекта сложно, и не всегда это получается сделать. Поэтому менее опытным водителям можно дать такой совет – совершая поворот, не нужно прижиматься вплотную к объекту, если же это произошло, – лучше отказаться от выполнения маневра.
1 ) Кинематика поворота: условие обеспечения единого центра поворота для всех колес двухосного автомобиля.
Для автомобиля с жесткими колесами (см. рис. 8.1), у которого векторы скоростей колес совпадают с плоскостью их вращения, центр поворота лежит на продолжении оси задних колес, а радиус поворота (из ΔОАБ). 
где L — база автомобиля; θ — угол поворота управляемых колес.
Схема поворота автомобиля с жесткими колесами:
О — центр поворота; А, Б — центры осей
скоростей передних и задних колес
Следовательно, радиус поворота авто R с жесткими колесами зависит только от угла поворота управляемых колес.
Для автомобиля с эластичными колесами (см. рис. 8.2), векторы скоростей которых не совпадают с плоскостью их вращения, центр поворота находится на некотором расстоянии С от оси задних колес, а радиус поворота (из ΔОАБ и ΔОБВ)
 где δ1, δ2 — углы увода передних и задних колес
где δ1, δ2 — углы увода передних и задних колес
2) Эластичное колесо как направляющий элемент автомобиля: виды деформации, влияние на деформацию конструктивных и эксплуатационных факторов.
3) Увод эластичного колеса: физическая сущность, угол и коэффициент сопротивления уводу. 4) Влияние увода колес на траекторию движения автомобиля при положении колесных дисков в направлении прямолинейного движения.
Уводом колеса называется его свойство катиться под углом к плоскости своего вращения вследствие действия боковой силы.
Эластичное колесо (рис) при отсутствии боковой силы катится в плоскости своего вращения, а при действии боковой силы — под некоторым углом.
У 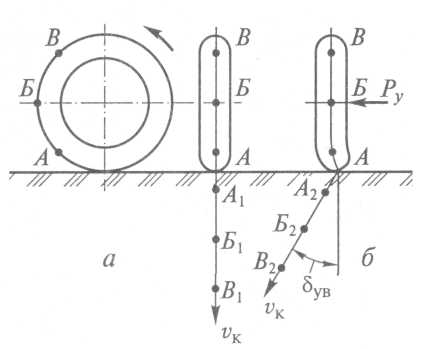 гол δув, образованный вектором скорости vк колеса и плоскостью его качения, называется углом увода. Угол увода колеса можно определить по формуле
гол δув, образованный вектором скорости vк колеса и плоскостью его качения, называется углом увода. Угол увода колеса можно определить по формуле
 где kув — коэффициент сопротивления уводу колеса.
где kув — коэффициент сопротивления уводу колеса.
Качение эластичного колеса
На рис. 1 показана зависимость угла увода колеса от приложенной к нему поперечной силы. Кривая ОАБВ включает в себя следующие характерные участки: ОА — увод колеса при отсутствии бокового скольжения шины (δув= 4. 6°); АБ — увод с частичным боковым проскальзыванием шины; БВ — полное скольжение шины вбок при Ру = Рсц (δув = 12. 15°).
Р  ис 1. Зависимость угла увода
ис 1. Зависимость угла увода
колеса от поперечной силы:
А—В — характерные точки кривой
Рис. 2. Зависимости коэффициента
сопротивления уводу колеса от
вертикальной нагрузки на него
и давления воздуха в шине:
Рв1 — Рв3 – значения давления воздуха в шине
Коэффициент сопротивления уводу колеса зависит от размеров и конструкции шины, давления воздуха в ней и вертикальной нагрузки на колесо. Так, при увеличении размеров шины и давления воздуха в ней коэффициент сопротивления уводу возрастает. При увеличении вертикальной нагрузки на колесо он сначала растет, а затем уменьшается (рис. 2). Для шин грузовых автомобилей и автобусов значения этого коэффициента составляют 30. 100 кН/рад, а для шин легковых автомобилей — 15. 40 кН/рад. От значения коэффициента сопротивления уводу во многом зависит боковое скольжение колеса. Чем меньше этот коэффициент, тем раньше начинается боковое скольжение.
4.5.3. Кинематика поворота автомобиля с эластичными колесами
Б оковой увод мостов на повороте приводит к тому, что векторы мгновенных скоростейVA и VB центров мостов отклоняются на углы увода передних колес δ1 и задних δ2; мгновенный центр поворота перемещается из точки О в точку O’, а радиус поворота становится равным R’.
оковой увод мостов на повороте приводит к тому, что векторы мгновенных скоростейVA и VB центров мостов отклоняются на углы увода передних колес δ1 и задних δ2; мгновенный центр поворота перемещается из точки О в точку O’, а радиус поворота становится равным R’.
Из геометрических соотношений следует, что
При высоких скоростях движения и углы увода, и углы поворота управляемых колес невелики (не превышают 10°).
В зависимости от соотношения углов увода переднего и заднего мостов радиус поворота R’ может быть либо равным радиусу поворота R автомобиля с жесткими колесами, либо меньше или больше его, в зависимости от чего различают три вида поворачиваемости.
Смещение центра поворота всегда происходит внутрь базы автомобиля.
4.5.4. Поворачиваемость атс
Статическая поворачиваемость – это свойство автомобиля изменять кривизну траектории при фиксированной величине угла поворота управляемых колес вследствие бокового увода.
При некоторой скорости, которая называется критической по условиям увода, автомобиль с избыточной поворачиваемостью потеряет управляемость. В этом случае он будет двигаться по криволинейно траектории радиусом R’ при не повернутых управляемых колесах (θ = 0) только за счет разности углов увода (δ2 — δ1).
Критическая по условиям увода скорость движения:
 .
.
У автомобиля с недостаточной поворачиваемостью критическая скорость отсутствует – подкоренное выражение отрицательно, с нейтральной поворачиваемостью она бесконечно велика.
Для случая избыточной поворачиваемости с целью обеспечения безопасности движения должно выполняться условие:
Чтобы обеспечить хорошую управляемость и безопасность движения при высоких скоростях, автомобилям придают небольшую недостаточную поворачиваемость – (δ1 — δ2) = 1 – 2º.
Чтобы получить необходимые параметры поворачиваемости, в конструкции автомобиля реализуют ряд мероприятий. Давление воздуха в шинах передних колес несколько уменьшают, по сравнению с давлением в задних; распределяют массу автомобиля так, чтобы часть ее, приходящаяся на передний мост M1, могла обеспечить необходимую степень недостаточности. Кроме того, на поворачиваемость оказывает влияние конструкция подвески, которую специальным образом конструируют, чтобы получить необходимую разность углов увода (δ2 — δ1).
4.6. Устойчивость атс
Устойчивость – это совокупность свойств АТС противостоять действию возмущающих сил, вызванных взаимодействием колес с неровностями дороги, аэродинамическими силами, наклоном дороги и др. Хорошей устойчивостью должны обладать все АТС, поскольку это свойство наряду с другими в значительной степени определяет безопасность движения.
Потеря устойчивости выражается в скольжении колес или опрокидывании автомобиля. В зависимости от направления скольжения или опрокидывания различают продольную и поперечную устойчивость. Более вероятно и опасно нарушение поперечной устойчивости.
Параметрами поперечной устойчивости могут являться:
— критические скорости кругового движения с заданным радиусом, соответствующие началу бокового скольжения колес или опрокидыванию АТС;
— критические углы косогора при прямолинейном движении, соответствующие началу бокового скольжения или опрокидыванию;
— коэффициент поперечной устойчивости.
Кроме указанных оценочных параметров могут использоваться и другие, поскольку общепринятая система оценочных показателей устойчивости отсутствует.
Кинематика поворота автомобиля с жесткими колесами
Управляемость АТС
При рассмотрении тягово-скоростных и тормозных свойств АТС принималось условие его прямолинейного движения. В действительности траектория движения всегда криволинейная с непрерывно изменяющейся кривизной. Криволинейность движения обусловлена необходимостью совершать повороты в соответствии с задаваемой водителем траекторией, а также неизбежным отклонением АТС от нее вследствие действия внешних возмущающих сил. При движении на прямолинейных участках пределы изменения радиуса кривизны траектории невелики, поэтому такое движение рассматривается условно как прямолинейное. Это позволяет рассматривать эксплуатационные свойства отдельно при прямолинейном и отдельно при криволинейном движениях.
Управляемость – это свойство АТС сохранять в определенной дорожной обстановке заданное направление движения или изменять его в соответствии с воздействием водителя на рулевое управление.
Для оценки управляемости предложено много оценочных показателей, в частности, установленных ГОСТ Р 52302-2004. Стандарт дает подробное определение каждого параметра и методы испытаний АТС.
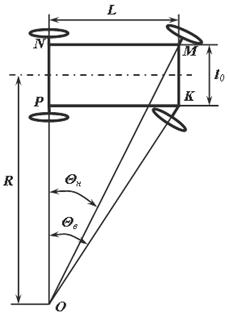 Соотношение между углами поворота наружного θн и внутреннего θв управляемых колес, при котором обеспечивается их качение без скольжения, определяется из треугольников ONM и OPK:
Соотношение между углами поворота наружного θн и внутреннего θв управляемых колес, при котором обеспечивается их качение без скольжения, определяется из треугольников ONM и OPK:
где lo – расстояние между осями поворотных цапф.
При этом под радиусом понимают расстояние от мгновенного центра поворота (точка О) до продольной оси автомобиля. Из геометрических соотношений:
где θ = (θ н + θ в) / 2 – средний угол поворота управляемых колес.
Приведенные выше формулы выведены при допущении, что колеса являются жесткими в поперечном направлении.
Однако в действительности автомобильная шина обладает боковой эластичностью, и при повороте возникающие боковые силы вызывают ее поперечную деформацию. Колесо катится с уводом.
 4.5.2. Боковой увод колеса
4.5.2. Боковой увод колеса
Боковой увод – это отклонение вектора скорости эластичного колеса от плоскости вращения при действии боковой силы. Если на колесо действует боковая сила Ру, то вектор скорости Vк, равный геометрической сумме скоростей Vx и Vy, отклоняется от плоскости вращения на некоторый угол δ, который называется углом бокового увода.
Сущность этого явления заключается в том, что при приложении к колесу силы Pу его обод сместится в направлении действия силы относительно центра площади контакта колеса с дорогой, деформируя элементы шины. Эта деформация по длине площади контакта разнообразная: впереди меньше, сзади больше. Вследствие этого продольная ось площади оказывается повернутой относительно плоскости вращения колеса на угол δ.
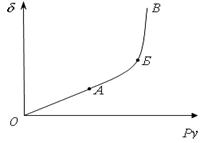 Результаты исследований показали, что угол увода колеса для определенного состояния шины является функцией боковой силы.
Результаты исследований показали, что угол увода колеса для определенного состояния шины является функцией боковой силы.
На графике этой зависимости можно отметить три характерных участка:
0А – угол увода линейно зависит от боковой силы;
АБ – переходной, где элементы шины начинают проскальзывать относительно дороги;
БВ – полное скольжение шины в боковом направлении.
Для линейного участка (0А) зависимости можно записать:
где kd – коэффициент сопротивления уводу, Н/рад (Н/град).
Физический смысл коэффициента сопротивления уводу – это боковая сила в Ньютонах, вызывающая увод колеса на 1 радиан (1 градус).
Коэффициент сопротивления уводу зависит от нормальной нагрузки на колесо, от продольной реакции, от типа и состояния дорожного покрытия, от конструкции подвески, от давления воздуха в шине и ее конструктивных параметров.
4.5.3. Кинематика поворота автомобиля с эластичными колесами
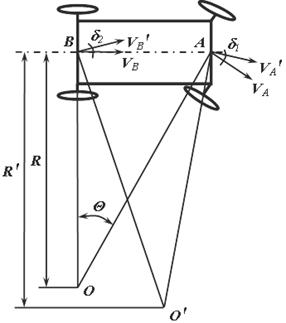 Боковой увод мостов на повороте приводит к тому, что векторы мгновенных скоростей VA и VB центров мостов отклоняются на углы увода передних колес δ1 и задних δ2; мгновенный центр поворота перемещается из точки О в точку O’, а радиус поворота становится равным R’.
Боковой увод мостов на повороте приводит к тому, что векторы мгновенных скоростей VA и VB центров мостов отклоняются на углы увода передних колес δ1 и задних δ2; мгновенный центр поворота перемещается из точки О в точку O’, а радиус поворота становится равным R’.
Из геометрических соотношений следует, что
При высоких скоростях движения и углы увода, и углы поворота управляемых колес невелики (не превышают 10°).
Для этих условий можно считать tg θ ≈ θ;tg (θ — δ1) ≈ θ — δ1; tg δ2 ≈ δ2 и записать:
R = L / θ,
В зависимости от соотношения углов увода переднего и заднего мостов радиус поворота R’ может быть либо равным радиусу поворота R автомобиля с жесткими колесами, либо меньше или больше его, в зависимости от чего различают три вида поворачиваемости.
Смещение центра поворота всегда происходит внутрь базы автомобиля.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет







