Кинематика автомобиля


Кинематика касается вопросов движения тел в пространстве, и для автомобилистов этот раздел механики имеет огромное значение. Не секрет, что при прохождении поворотов у водителей зачастую возникают проблемы с выбором траектории движения транспортного средства, которые могут повлечь за собой самые негативные последствия. Именно поэтому следует уделить кинематике поворотов самое пристальное внимание
Аспекты, требующие особой внимательности
Понимание принципов движения колес автомобиля в повороте позволяет грамотно выполнять водителю все необходимые маневры даже в проблемных местах. Для наглядности можно выехать на участок дороги, на котором следы от колес будут хорошо заметны.
 Сначала следует двигаться по прямой, а потом, вывернув колеса до упора, описать дугу. На прямом участке будут хорошо видны две полосы, а после начала поворота их окажется уже четыре. При этом задние колеса оставят следы ближе к центру поворота, а передние — ближе к его наружной части.
Сначала следует двигаться по прямой, а потом, вывернув колеса до упора, описать дугу. На прямом участке будут хорошо видны две полосы, а после начала поворота их окажется уже четыре. При этом задние колеса оставят следы ближе к центру поворота, а передние — ближе к его наружной части.
Чтобы понять суть такой картины, следует обратить внимание на такие аспекты:
- в начале движения передние колеса неизбежно уведут в сторону переднюю часть автомобиля;
- корпус машины начнет двигаться под углом относительно своего первоначального местоположения;
- в силу жесткого расположения относительно корпуса машины его задних колес, двигаться по аналогичной траектории начнут и они;
- задние колеса не будут идти по прямой вплоть до того места, где осуществят поворот передние;
- в повороте из-за этого движение автомобиля происходит полубоком, поэтому и появляются четыре следа от колес.
Такая особенность движения машины может стать причиной наезда на препятствия задними колесами или столкновения с различными объектами.
Максимальное срезание траектории и ее особенности
В процессе такого маневрирования водителю нельзя акцентировать внимание только на передней части автомобиля. У задних колес получается срезанная траектория, и разница между их следами и следами передних колес зависит от двух моментов:
- от угла поворота, совершаемого передними колесами;
- от расстояния между автомобильными осями (база).
 При повороте колес до упора получается максимальное срезание траектории. Оно выражается в расстоянии между следами при выкручивании колес до упора. Зная это расстояние, водитель может рассчитать эту траекторию и, основываясь на имеющейся информации, выполнить необходимый ему маневр при подъезде к препятствию:
При повороте колес до упора получается максимальное срезание траектории. Оно выражается в расстоянии между следами при выкручивании колес до упора. Зная это расстояние, водитель может рассчитать эту траекторию и, основываясь на имеющейся информации, выполнить необходимый ему маневр при подъезде к препятствию:
- если расстояние до объекта больше максимального срезания траектории – поворачивать колеса следует после его достижения передними колесами;
- если расстояние до объекта меньше максимального срезания траектории, – либо идти по прямой, либо не выворачивать колеса до упора;
- если до объекта практически не осталось места для маневра, поворот следует делать только по достижении препятствия осью задних колес.
Чем больше база, тем больше траектория срезания, поэтому у длинных и габаритных машин при прохождении поворота передние колеса зачастую выходят на встречную полосу, а задние соприкасаются с обочиной.
 У автомобилей с большим задним свесом, когда имеется большое расстояние от задней оси до заднего габарита, встречается и другая проблема – при выполнении поворота идет выворачивание корпуса машины под определенным углом. При таком маневре корпуса вся передняя часть автомобиля уходит в сторону поворота, а задняя – в противоположную.
У автомобилей с большим задним свесом, когда имеется большое расстояние от задней оси до заднего габарита, встречается и другая проблема – при выполнении поворота идет выворачивание корпуса машины под определенным углом. При таком маневре корпуса вся передняя часть автомобиля уходит в сторону поворота, а задняя – в противоположную.
Если, к примеру, большой автобус совершает такой поворот, а рядом с ним находится легковой автомобиль, то задняя часть автобуса в ходе поворота неизбежно заденет его. Отсюда и четкое правило – никогда не следует вплотную прижиматься к габаритным транспортным средствам.
О практике грамотного прохождения поворотов
Попрактиковаться с прохождением поворотов можно, объезжая какой-нибудь статичный объект, например, столб или дерево. Схема поворота в этом случае следующая:
- сначала можно вплотную прижаться к объекту левым боком и совершить левый же поворот в тот момент, когда его оси достигли задние колеса;
- потом следует заранее просчитать боковое расстояние до объекта, которое больше максимальной траектории, после чего при достижении нужного места передними колесами можно совершать поворот.
Заранее выполнить расчет бокового расстояния до объекта сложно, и не всегда это получается сделать. Поэтому менее опытным водителям можно дать такой совет – совершая поворот, не нужно прижиматься вплотную к объекту, если же это произошло, – лучше отказаться от выполнения маневра.
Кинематика поворота автомобиля.




![]()
![]()
Существуют следующие способы поворота колесной машины.
1) Поворот передних управляемых колес.
2) Совместный поворот передних и задних управляемых колес.
3) Поворот бортом без управляемых колес за счет отключения передачи вращающего момента на правые или левые неуправляемые колеса и торможение колес, внутренних по отношению к кривой поворота. Поворот без управляющих колес может быть осуществлен созданием разных скоростей вращения колес левого и правого бортов машины (по аналогии с гусеничной машиной).
4) Поворот путем комбинации рассмотренных выше способов.
5) Поворот за счет поворота передней части остова машины при сочлененной раме.
Третий способ поворота (бортом) имеет смысл использовать на машинах со всеми одинакового размера ведущими колесами большого диаметра. При этом упрощается привод к ведущим колесам и компоновка передних колес, однако, повышается износ шин.
На рис.6 схематически показан поворот колесной машины с управляемыми передними колесами (наиболее типичный вариант).
Мгновенный цент поворота О1 находится в точке пересечения перпендикуляров к векторам скоростей движения колес. Расстояние от центра поворота О1 до оси заднего моста автомобиля принято называть радиусом поворота R = L·ctg α. При повороте передних управляемых колес машины на одинаковый угол такое пересечение будет невозможно, так как перпендикуляры к векторам скоростей этих колес будут параллельны.
В этом случае движение на повороте сопровождалось бы скольжением управляемых колес вбок, управляемость машины ухудшалась бы, а износ шин и сопротивление движению возросли.
Как следует из рис.6, чистое качение управляемых колес машины без скольжения при движении на криволинейных участках возможно лишь в том случае, если между углами поворота внутреннего α1 (ближнего к центру поворота) и внешнего α2 (удаленного от центра поворота) колес будет следующее соотношение:
 ,
,
где α1 и α2 – соответственно углы поворота внутреннего и внешнего управляемых колес;
В – расстояние между осями шкворней поворотных цапф (приближенно может быть принято равным ширине колеи);
Выполнение этого условия достигается с помощью шарнирного четырехзвенника, называемого рулевой трапецией, соединяющей между собой управляемые колеса. Подбирая соответствующие значения параметров рулевой трапеции, геометрию элементов и кинематику в целом, получают соотношение между углами α1 и α2 , близкое к теоретическому. Однако рулевая трапеция не может обеспечить точно заданное (теоретическое) соотношение между углами поворота колес при различных их величинах, в тех пределах, в которых это не
 |
обходимо на автомобилях.
Рис.6. Схема, иллюстрирующая поворот машины с управляемыми
Кинематика поворота автомобиля с жесткими колесами
Управляемость АТС
При рассмотрении тягово-скоростных и тормозных свойств АТС принималось условие его прямолинейного движения. В действительности траектория движения всегда криволинейная с непрерывно изменяющейся кривизной. Криволинейность движения обусловлена необходимостью совершать повороты в соответствии с задаваемой водителем траекторией, а также неизбежным отклонением АТС от нее вследствие действия внешних возмущающих сил. При движении на прямолинейных участках пределы изменения радиуса кривизны траектории невелики, поэтому такое движение рассматривается условно как прямолинейное. Это позволяет рассматривать эксплуатационные свойства отдельно при прямолинейном и отдельно при криволинейном движениях.
Управляемость – это свойство АТС сохранять в определенной дорожной обстановке заданное направление движения или изменять его в соответствии с воздействием водителя на рулевое управление.
Для оценки управляемости предложено много оценочных показателей, в частности, установленных ГОСТ Р 52302-2004. Стандарт дает подробное определение каждого параметра и методы испытаний АТС.
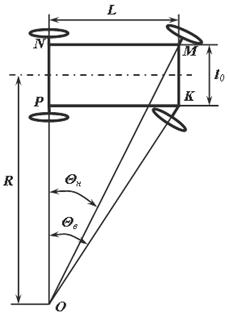 Соотношение между углами поворота наружного θн и внутреннего θв управляемых колес, при котором обеспечивается их качение без скольжения, определяется из треугольников ONM и OPK:
Соотношение между углами поворота наружного θн и внутреннего θв управляемых колес, при котором обеспечивается их качение без скольжения, определяется из треугольников ONM и OPK:
где lo – расстояние между осями поворотных цапф.
При этом под радиусом понимают расстояние от мгновенного центра поворота (точка О) до продольной оси автомобиля. Из геометрических соотношений:
где θ = (θ н + θ в) / 2 – средний угол поворота управляемых колес.
Приведенные выше формулы выведены при допущении, что колеса являются жесткими в поперечном направлении.
Однако в действительности автомобильная шина обладает боковой эластичностью, и при повороте возникающие боковые силы вызывают ее поперечную деформацию. Колесо катится с уводом.
 4.5.2. Боковой увод колеса
4.5.2. Боковой увод колеса
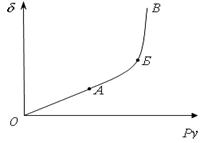
Боковой увод – это отклонение вектора скорости эластичного колеса от плоскости вращения при действии боковой силы. Если на колесо действует боковая сила Ру, то вектор скорости Vк, равный геометрической сумме скоростей Vx и Vy, отклоняется от плоскости вращения на некоторый угол δ, который называется углом бокового увода.
Сущность этого явления заключается в том, что при приложении к колесу силы Pу его обод сместится в направлении действия силы относительно центра площади контакта колеса с дорогой, деформируя элементы шины. Эта деформация по длине площади контакта разнообразная: впереди меньше, сзади больше. Вследствие этого продольная ось площади оказывается повернутой относительно плоскости вращения колеса на угол δ.
 Результаты исследований показали, что угол увода колеса для определенного состояния шины является функцией боковой силы.
Результаты исследований показали, что угол увода колеса для определенного состояния шины является функцией боковой силы.
На графике этой зависимости можно отметить три характерных участка:
0А – угол увода линейно зависит от боковой силы;
АБ – переходной, где элементы шины начинают проскальзывать относительно дороги;
БВ – полное скольжение шины в боковом направлении.
Для линейного участка (0А) зависимости можно записать:
где kd – коэффициент сопротивления уводу, Н/рад (Н/град).
Физический смысл коэффициента сопротивления уводу – это боковая сила в Ньютонах, вызывающая увод колеса на 1 радиан (1 градус).
Коэффициент сопротивления уводу зависит от нормальной нагрузки на колесо, от продольной реакции, от типа и состояния дорожного покрытия, от конструкции подвески, от давления воздуха в шине и ее конструктивных параметров.
4.5.3. Кинематика поворота автомобиля с эластичными колесами
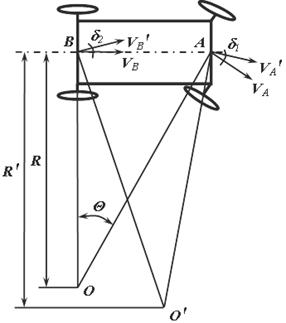 Боковой увод мостов на повороте приводит к тому, что векторы мгновенных скоростей VA и VB центров мостов отклоняются на углы увода передних колес δ1 и задних δ2; мгновенный центр поворота перемещается из точки О в точку O’, а радиус поворота становится равным R’.
Боковой увод мостов на повороте приводит к тому, что векторы мгновенных скоростей VA и VB центров мостов отклоняются на углы увода передних колес δ1 и задних δ2; мгновенный центр поворота перемещается из точки О в точку O’, а радиус поворота становится равным R’.
Из геометрических соотношений следует, что
При высоких скоростях движения и углы увода, и углы поворота управляемых колес невелики (не превышают 10°).
Для этих условий можно считать tg θ ≈ θ;tg (θ — δ1) ≈ θ — δ1; tg δ2 ≈ δ2 и записать:
R = L / θ,
В зависимости от соотношения углов увода переднего и заднего мостов радиус поворота R’ может быть либо равным радиусу поворота R автомобиля с жесткими колесами, либо меньше или больше его, в зависимости от чего различают три вида поворачиваемости.
Смещение центра поворота всегда происходит внутрь базы автомобиля.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Вопрос. Кинематика поворота автомобиля.
Четкое понимание того, как едут разные колеса автомобиля в повороте, позволяет водителю грамотно маневрировать в узких местах. Для наглядного примера сядьте за руль и выезжайте на участок, где хорошо видны следы автомобиля (снег, после лужи, пыль и т.д.). Сначала двигайтесь по прямой, через несколько метров быстро поверните колеса до упора и опишите на автомобиле дугу. Выходите и смотрите на оставленные автомобилем следы. До тех пор, пока автомобиль двигался по прямой, он оставлял два следа. Как только начался поворот, наблюдается раздвоение следов и в повороте автомобиль оставляет четыре следа. Глядя на автомобиль, можно увидеть, что следы задних колес идут ближе к центру поворота, а следы передних – к наружной части поворота. Обратите внимание на расстояние между следами переднего и заднего внутренних (по отношению к повороту) колес. Это расстояние не нужно мерить в сантиметрах, просто запомните его примерно визуально. Теперь пришло время разобрать суть происходящего. На рисунке показан автомобиль вид сверху, передние колеса повернуты. В начальный момент времени, когда передние колеса начинают двигаться в сторону, они увлекают переднюю часть автомобиля в сторону. В результате, корпус автомобиля поворачивается под углом к своему первоначальному положению. А в связи с тем, что задние колеса всегда жестко вдоль корпуса, вместе с корпусом повернулись и они. Они не продолжат двигаться по прямой аж до места поворота передних колес, они в первый же момент времени также начинают отклоняться в сторону. Таким образом, автомобиль в повороте двигается немного полубоком и оставляет четыре следа, где следы задних колес ближе к центру поворота. Именно поэтому можно неосторожно помять бока при узких маневрах, наехать задними колесами на препятствия, которые благополучно миновали передние колеса. При всех маневрах водителю следует оперировать с большой прямоугольной коробкой, а не концентрироваться только на том, лишь бы проехал капот. Задние колеса при повороте как бы срезают траекторию. Разница между следом переднего и заднего внутренних к повороту колес (назовем ее величиной срезания траектории) зависит от двух параметров: расстояние между осями автомобиля (база) и угол поворота передних колес. База является конструктивным параметром и для данного конкретного автомобиля не меняется.
Таким образом, максимальное срезание траектории получается тогда, когда водитель поворачивает колеса до упора. Когда вы смотрели на следы, вы видели максимально возможное срезание траектории для вашего автомобиля (т.к. вы разворачивались с повернутыми до упора колесами). Визуальное знание этого расстояния помогает водителю заранее просчитывать возможность того или иного маневра. Если при подъезде к препятствию, которое водитель собирается обогнуть, он видит, что расстояние до объекта больше, чем максимально возможное срезание траектории его автомобиля, он может поворачивать колеса до упора уже тогда, когда доехал до объекта передними колесами. В таком случае водитель, зная конструктивные параметры своего автомобиля, может действовать всегда не наугад, а точно и спланировано. Если расстояние до объекта оказывается меньше – водитель вынужден протянуть по прямой дальше и только потом поворачивать, либо не поворачивать колеса до упора. Если расстояния от автомобиля до объезжаемого объекта практически нет – водитель вынужден протягивать по прямой аж до тех пор, пока объект не достигнет оси задних колес и только потом поворачивать. Нет необходимости проезжать объект полностью всем автомобилем, достаточно доехать только до оси задних колес – ведь именно эта точка автомобиля ближе всего приближается к объезжаемым препятствиям.
У автомобилей с большей базой, величина срезания траектории больше. Особенно это видно на примере длинных грузовиков и автобусов – иногда при крутом повороте передняя часть такой машины выходит аж на встречную полосу, а задние колеса, при этом, притираются к бордюру. По той же причине большие городские автобусы делают «ломающимися» с гармошкой – если такую длину сделать жесткой, автобус не пролезет ни в один поворот. В результате, водителю всегда следует избегать движения вблизи длинного транспортного средства в крутых поворотах.

Для автомобилей с длинными багажниками (имеется в виду большой задний свес – расстояние от оси задних колес до заднего габарита) имеется и другая проблема. Когда такой автомобиль начинает поворачивать, его корпус поворачивается на какой-то угол. Корпус поворачивается относительно задних точек опоры, т.е. все, что впереди задних колес уходит в сторону поворота, а все, что сзади (т.е. хвост) смещается в противоположную сторону. Поэтому, если водитель стоит вплотную к автомобилю с длинным хвостом (как правило, это автобусы), который собирается поворачивать в противоположную сторону, водителю следует учитывать то, что задняя часть этого автомобиля сейчас пойдет на него. Особенно это касается трамваев – у них очень большие свесы как впереди, так и сзади. Никогда не прижимайтесь к трамваям на поворотах!
Для легкового автомобиля кого-то задеть при движении по дороге невозможно, а вот при маневрах в узких местах – это уже вполне актуальная проблема. Всегда при маневрах водителю следует помнить, что он находится в большой прямоугольной коробке и ему необходимо учитывать движения всех частей кузова.
Для закрепления, вы можете поездить вокруг высокого объекта, например, вокруг дерева или столба. Сначала прижмитесь к нему вплотную левым бортом и по возможности поверните налево – для этого вам предстоит проехать по прямой аж до того момента, когда до препятствия доехали задние колеса автомобиля, и только потом поворачивать. Теперь при подъезде заранее выберете такое боковое расстояние до препятствия, которое больше максимального срезания траектории задними колесами вашего автомобиля – теперь вы сможете поворачивать максимально круто, как только доехали до объекта передними колесами. При таком расчете очень важно доехать до объекта передними колесами – если вы начнете поворачивать хоть на 50 см. раньше – автомобиль заденет препятствие при маневре.
В реальных ситуациях не всегда удается заранее просчитать боковые расстояния до объектов, главное для водителя помнить – если хотите поворачивать, не прижимайтесь к объектам, если получилось так, что прижались – не поворачивайте.
По дисциплине «Конструкция и эксплуатационные свойства ТиТТМО»
Вопрос. Излишняя поворачиваемость автомобиля.
Повора́чиваемость — показатель, который говорит о поведении автомобиля в повороте. Поворачиваемость бывает недостаточной, избыточной и нейтральной.
Поворачиваемость зависит от условий езды: например, автомобиль может испытывать недостаточную поворачиваемость в одних поворотах и избыточную в других, или недостаточную при разгоне и избыточную при торможении.
Избыточная поворачиваемость
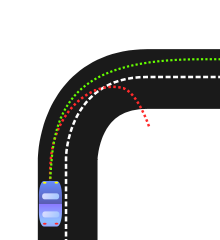
Пример избыточной поворачиваемости
Если боковой увод колес задней оси больше, чем увод колес передней оси, и угол поворота машины относительно центра масс увеличивается, то это называется избыточной поворачиваемостью. (англ. oversteering). В этом случае у автомобиля сносит заднюю ось, вплоть до разворота.
В случае возникновения заноса задних колёс:
- на заднеприводном автомобиле повернуть руль в сторону противоположную направлению поворота (в сторону заноса) и либо отпустить газ (но не доводя автомобиль до торможения двигателем и не очень резко), либо нажать на газ, переведя автомобиль в режим управляемого заноса;
- на полноприводном автомобиле: повернуть руль в сторону противоположную направлению поворота, а реакция на работу с тягой индивидуальна в зависимости от схемы полного привода, развесовки машины и прочих факторов. Именно из-за неоднозначных реакций управление полноприводными машинами с традиционными межосевыми дифференциалами считается намного более сложным.
- на переднеприводном автомобиле повернуть руль в сторону противоположную направлению поворота, и увеличить тягу. Педаль тормоза не трогать в случае отсутствия системы АБС.
Совет о нежелательности торможения при заносе на данный момент устарел, современные системы АБС и стабилизации эффективно гасят занос, помогая управляющим действиям водителя, а в случае ошибки руления, тяжесть последствий снижается из-за снижения скорости движения машины.
Если избыточную поворачиваемость не удаётся скорректировать, следует приготовиться к тому, что автомобиль перейдет в неконтролируемое вращение..
Заднеприводной автомобиль склонен к избыточной поворачиваемости при максимальной тяге на ведущих колесах, на нём избыточная поворачиваемость корректируется сложнее, чем на переднеприводном, ввиду возможности срыва колес в скольжении как при переизбытке тяги, так и при излишнем торможении двигателем. Современные заднеприводные автомобили при включенных системах контроля устойчивости вполне безопасны, но на скользкой дороге избыточная поворачиваемость всё равно чувствуется. Будьте внимательнее.
Стоит заметить, что автомобили для ралли могут иметь любую поворачиваемость (не обязательно избыточную). Для прохождения поворотов в управляемом заносе избыточную поворачиваемость создают искусственно такими приёмами, как контрсмещение, использование ручного тормоза, избыток газа (не для переднеприводгого автомобиля), динамическое перераспределение веса на переднюю ось (загрузка передней оси торможением или сбросом газа), и т. д. Автомобили, подготовленные для ралли по скользким дорогам (лед, грязь, гравий) могут иметь недостаточную поворачиваемость из-за особенностей трансмиссии: жесткие межосевые и межколесные дифференциалы могут препятствовать тому, что внутренние колеса в повороте крутятся медленнее. Это мешает автомобилю двигаться по дуге с колесами, повернутыми на угол, соответствующий крутизне поворота. Поэтому пилоты таких автомобилей создают поворачиваемость искусственно вышеуказанными приемами, а у зрителей создается впечатление, что автомобиль проходит повороты «боком» или «веером».
По дисциплине «Конструкция и эксплуатационные свойства ТиТТМО»







