- Устройство и ремонт швейной машины
- 1. Устройство швейной машины челночного стежка
- 2. Термины, используемые в названиях деталей
- 3. Как образуется двухниточный челночный стежок
- 4. Настройка взаимодействие иглы и челнока
- Курсовая работа: Кинематический и силовой анализ механизмов иглы и нитепритягивателя универсальной швейной машины
Устройство и ремонт швейной машины

На уроках технологии в школе объясняют устройство швейной машины и практически все мы уверенны, что знаем, как устроена швейная машина. Тем не менее, очень часто мы неверно употребляем названия некоторых деталей. И совсем уж редко, кто имеет точное представление, как устроено челночное устройство, устройство ручного привода, как образуется швейный стежок и др.
Выполняя ремонт и настройку швейных машин самостоятельно, особенно используя для этого техническую литературу, нужно знать значение терминов, понимать принцип работы швейных машин и изучить ее устройство.
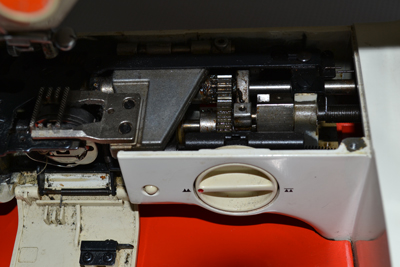
1. Устройство швейной машины челночного стежка
Все старые модели швейных машин типа Зингер, Подольск 2М ПМЗ выполняют одну единственную прямую строчку и устройство этих швейных машин практически одинаковое.
Такие швейные машины часто оснащались громоздким столом с ножным приводом, но чаще всего устанавливался ручной привод.
На смену таких моделей машин пришло новое поколение швейных машин, выполняющих строчку зигзаг и использующих электрический привод.
Швейные машинки типа Подольск 142 и Чайка имеют вертикальный тип качающегося челнока и ограниченный набор операций.
Современные швейные машины Brother, Janome, Singer и другие марки используют уже более современную горизонтальную конструкцию челнока.
Некоторые модели швейных машин имеют вертикальный челнок «двойного облегания» вращающегося типа, как у промышленных машин.
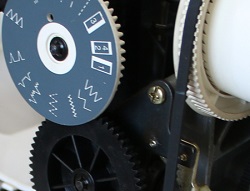
Управление многими операциями у многих современных швейных машин осуществляется с помощью компьютерных программ, что позволяет изготавливать глазковые петли и вышивать любые рисунки и узоры.
Большой выбор лапок, аксессуаров и комплектация дополнительными устройствами расширяют возможности машинок безгранично, позволяя выполнить любую операцию, связанную с пошивом одежды.
2. Термины, используемые в названиях деталей
Винт может быть с головкой и без нее. Винт имеет на стержне резьбу, а сверху головки канавку для отвертки.
Болт имеет четырехгранную головку под соответствующий гаечный ключ, и также нарезанную резьбу.
Вал — круглая ось для закрепления узлов и механизмов, деталей швейной машины и передачи им движения.
Втулка — деталь цилиндрической формы, с отверстием внутри. Служит для фиксации валов и осей. Вместо втулок могут использоваться подшипники скольжения и подшипники качения.

Для передачи вращения параллельным валам, находящимся на большом расстоянии друг от друга применяют ременные и зубчатые ременные передачи.
Кривошип закрепляется на краю вращающегося вала, в который вставляется палец крепления шатуна.
Шатун — стержень с двумя головками (втулками). Это основной элемент преобразования движения одного вала в движение другого.
Рейка — зубчатая деталь, находящаяся под лапкой, предназначенная для продвижения ткани.
Нитепритягиватель — длинный поводок на лицевой стороне машинки, выдергивающий нитку во время образования стежка. На краю его имеется ушко или разрез для вдевания верхней нитки.
Игольная пластина — пластина с отверстием для прохода иглы к челночному ходу. Внутри пластины имеются прорези для зубчиков рейки.
Игловодитель — стержень удерживающий иглу и проводящий ее в движение.
Шпулька — небольшая катушка. На нее наматывается нижняя нитка.
Шпульный колпачок — деталь челночного хода, в которую вставляют шпульку швейной машины.
3. Как образуется двухниточный челночный стежок
Двухниточная челночная строчка образуется переплетением двух нитей. Узел соединенных нитей должен находиться в середине тканей или материалов. Верхняя нитка называется игольной, поскольку заправляется в ушко иглы. Нижняя нитка называется челночной, поскольку вытягивается из шпульки, находящейся внутри шпульного колпачка.
Кроме челночного типа стежка в бытовом, но чаще промышленном исполнении, выпускаются швейные машины цепного стежка. Подробно, о том как образуется цепной стежок вы может узнать в статье Промышленная распошивальная машина.
Основной недостаток и отличие челночной строчки в том, что она малорастяжимая, по сравнению с цепным стежком, поэтому не применяется для пошива трикотажных, сильно растягивающихся тканей. При растяжении шва таких изделий, например спортивной одежды, нитки челночного шва могут лопнуть. Основное преимущество такого вида строчки в том, что она трудно распускаемая и достаточно прочная, как в поперечном, так и в продольном направлении.

Образование челночного стежка производится с помощью качающегося (колеблющегося из стороны в сторону) или вращающегося по кругу челнока. В бытовых швейных машинах, особенно старого образца, используется качающийся челнок.
У недорогих моделей современных швейных машин также используется качающийся челнок, но большинство бытовых швейных машинок имеют горизонтальный, вращающийся по кругу тип челнока. Его легко отличить, шпулька вставляется сверху и видна как на ладони.
Самым надежным, выдерживающим высокие скорости работы, считается челнок вертикального типа, вращающийся по кругу. Такой тип челночного устройства обычно используется в промышленных и дорогих моделях бытовых машин.
Образование стежка происходит, когда игла опускается в ткань и начинает подниматься вверх на 1,8 — 2 мм. Именно в этот момент создается избыток верхней нитки выше ушка иглы. Появляется петля, в которую и заходит носик челнока. Захватив верхнюю нитку, челнок проворачивает ее по кругу и одновременно нитепритягиватель начинает движение вверх, подтягивая верхнюю нитку. Вслед за этим, рейка машины (зубчики) продвигают ткань на ширину стежка для подготовки нового цикла. Челнок совершает за время одного цикла образования стежка два оборота. Один оборот холостой, хотя остальные узлы швейной машины (игла, рейка, нитепритягиватель) в это время работают. Они заканчивают формирование челночного стежка.
4. Настройка взаимодействие иглы и челнока

Знание устройства швейной машины и процесса образования челночного стежка позволит вам понять, как настраивать челночный узел, взаимодействие иглы и носика челнока. От параметров взаимодействие иглы и челнока во многом зависит качественная работа швейной машины и появление таких дефектов строчки как пропуски, «петляние», обрыв верхней и нижней нитки и др.

Параметры настройки зазоров иглы и носика челнока:
В момент поднятия иглы на 1.8 — 2.0 мм рядом с ушком происходит образование петли верхней нитки. В этот момент носик челнока должен приблизиться почти вплотную (0,15 мм) с лезвием (небольшое углубление) иглы и одновременно выше ушка иглы на 1.5 мм.
Приведенные параметры имеют среднее значение и являются лишь ориентиром при настройке практически любой машинки челночного стежка. В зависимости от вида ткани, нитки они могут меняться. Для толстых или трикотажных тканей устанавливаются несколько иные параметры и, как правило, подбираются опытным путем.
Влияние на качественное формирование челночного стежка оказывают также рейка, лапка, шпулька, натяжитель верхней нитки, компенсационная пружина и другие узлы и детали. Более подробно об их значении, настройке и ремонте можно узнать на страницах нашего сайта, например в статье Ремонт и настройка швейной машины 22 класса.
В этом видео даются рекомендации, как правильно натянуть ремень электропривода и советы как избежать дорогостоящего ремонта швейной машинки. Видео на английском, но можно выбрать нужный вам язык субтитров.
Устройство современной швейной машины
Как устроена современная бытовая швейная машина с электроприводом. Основные неисправности узлов и механизмов.

Причины пропуска стежков на швейной машине
Настройка и ремонт швейной машины потребуется, если машина постоянно делает пропуски стежков в строчке. Но иногда причиной появившихся пропусков могут быть неправильная настройка натяжения ниток, неправильная установка иглы.
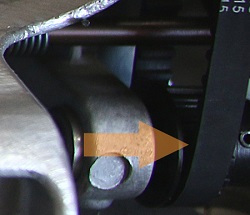
Зубчатый швейный ремень
Зубчатый швейный ремень современных швейных бытовых машин с горизонтальным челноком. Как натянуть и установить правильное положение ремня.

Как устроен швейный челнок
Швейный челнок для любой швейной машины — это главное ее устройство. От того как настроены его параметры взаимодействия с иголкой зависит качество образования стежка. Многие неисправности швейных машин связаны именно с работой челночного устройства.

Швейная машинка Подольск
Устройство швейной машинки Подольск несложное по сравнению с современными моделями швейных машин других марок. Настройку и ремонт можно выполнить самостоятельно даже не имея опыта ремонта швейных машин. Достаточно внимательно почитать некоторые статьи нашего сайта.

Швейная машинка Чайка
Устройство швейной машины Чайка, особенно ее настройка и ремонт, отличаются от простеньких ручных машинок типа Зингер. Главный узел швейной машины — это челночный ход, настроить который самостоятельно достаточно сложно. Но не всегда это нужно делать. Иногда, нужно лишь правильно настроить натяжение нижней нитки и машинка снова будет нормально работать.
Зубчатый швейный ремень
Зубчатый швейный ремень современных швейных бытовых машин с горизонтальным челноком. Как натянуть и установить правильное положение ремня.
All rights reserved © / 2011 / Sewing-Master.ru / How to repair sewing machine at home by yourself / MY-Project
У вас есть швейная машинка, и вы любите шить? Тогда этот сайт для вас. Профессиональные мастера подскажут вам как выполнить мелкий ремонт швейной, вязальной машинки. Опытные технологи поделятся секретами пошива одежды. Обзорные статьи подскажут, какую купить швейную или вязальную машину, утюг манекен и много других полезных советов вы найдете на нашем сайте.
Спасибо, что вы полностью просмотрели страницу.
Копирование и перепечатка статей сайта «Швейный мастер» без согласия автора запрещена.
Авторские права защищаются законом.
Курсовая работа: Кинематический и силовой анализ механизмов иглы и нитепритягивателя универсальной швейной машины
| Название: Кинематический и силовой анализ механизмов иглы и нитепритягивателя универсальной швейной машины Раздел: Промышленность, производство Тип: курсовая работа Добавлен 16:15:58 15 мая 2008 Похожие работы Просмотров: 1469 Комментариев: 14 Оценило: 3 человек Средний балл: 5 Оценка: неизвестно Скачать | ||||||||||||

 Руководитель проекта Ноздрачева Т.М.
Руководитель проекта Ноздрачева Т.М. 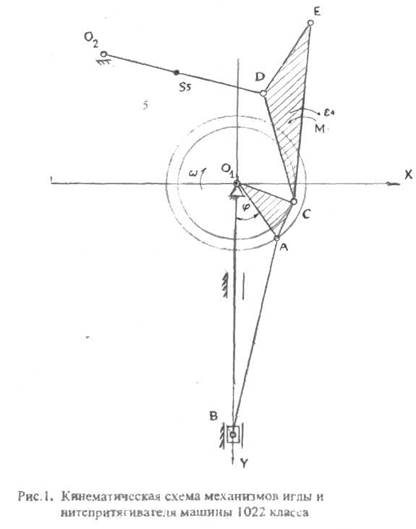 |
Кинематическая схема может быть плоской или пространственной (в ортогональном или аксонометрическом изображении). На рис. I представлена плоская кинематическая схема механизмов иглы и нитепритягивателя универсальной швейной машины 1022 класса. На рис. 2 — пространственная конструктивно-кинематическая схема.
Машина 1022 класса предназначена для стачивания деталей швейных изделий из хлопчатобумажных и шерстяных тканей однолинейной двухниточной строчкой челночного переплетения. Основными рабочими механизмами машины являются: кривошипно-шатунный механизм иглы, ротационный механизм челнока, шарнирно-стержневой механизм нитепритягивателя, простой механизм транспортирования материалов, узел лапки. В машине осуществляется централизованная смазка.
В курсовом проекте в соответствии с полученными данными необходимо построить кинематическую схему механизмов иглы и нитепритягивателя. Кинематические схемы выполняют в масштабе, который рассчитывается по формуле:
Kl =  (1)
(1)
L – действительные размеры кинематического звена, м;
l – размер этого звена на кинематической схеме, мм.
| Частота вращения главного вала, n, мин -1 | ||||||||||
| 5200 | 14 | 12 | 9 | 35 | 24 | 18 | 26 | 24 | 31 | 51 |
Таблица 1: исходные данные для построения кинематической схемы механизмов иглы и нитепритягивателя
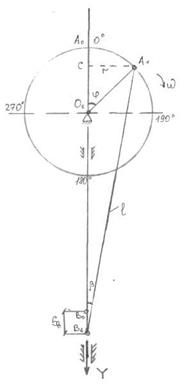
Кинематическую схему механизма строят в следующем порядке. Вначале по заданным координатам x и y точек О1 и О2 (табл.1) в выбранном масштабе длин Кl , мм/мм, м/мм, (табл.2) наносят положение неподвижных точек О1 и О2 и проводят осьО1 В неподвижной направляющей игловодителя, совпадающей с линией его движения. Затем из центра О1 радиусами
 О1 А =
О1 А =  и О1 С =
и О1 С =  мм проводят окружности — траектории точек А и С.
мм проводят окружности — траектории точек А и С.
Далее траектории этих точек разбивают на двенадцать равных частей (в точках (1,2,3. 12 и 1′,2′,3′. 12′). Построение схемы механизмов в указанных 12 положениях выполняют с использованием метода засечек.
Кинематическая схема и разметка траекторий рабочих точек звеньев механизмов иглы и нитепритягивателя представлены в приложении.
Таблица 2: расчетные данные для построения кинематической схемы механизмов иглы и нитепритягивателя
Основой для кинематического анализа является кинематическая схема рис.2
Перемещение точки В игловодителя определяется из рассмотрения различных положений кривошипно-шатунного механизма. Палец кривошипа, т.е. шарнир А1 из крайнего верхнего положения А0 проворачивается на угол φ. При этом игловодитель перемещается на величину Sв . Опустив из точки А перпендикуляр А1 С на линию движения игловодителя О1 В1 получим:
Sв = (l . cosβ – r . cosφ) — (l — r) = r . (1 – cosφ) – l . (1 – cosβ) (3)
В полученное выражение φ и β – переменные величины
Рассмотрим ∆ СА1 О1 и ∆ СА1 В1 и выразим значение углов
СА1 = l . sinβ , тогда
sinβ = r/l . Sinφ (4)
 |
Разложим cosβ в степенной ряд, получим
cosβ = 1 —  +
+  +. (5)
+. (5)
влияние 3 и 4 . множителей не имеет значения, ими можно пренебречь, тогда получим выражение и подставим его в формулу (2), получим
Sв = r . (1 – cosφ) –  (6)
(6)
Дифференцируя это выражение по времени можно получить уравнение скорости и ускорения:
S’в = υВ =  = ω . r . (sinφ +
= ω . r . (sinφ +  ) (7)
) (7)
S’’в =аВ =  = ω 2. r . ( scosφ +
= ω 2. r . ( scosφ +  ) (8)
) (8)
График перемещения точки В
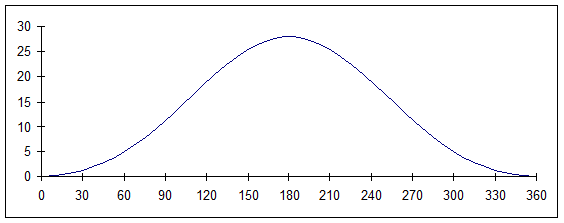
График скорости точки В
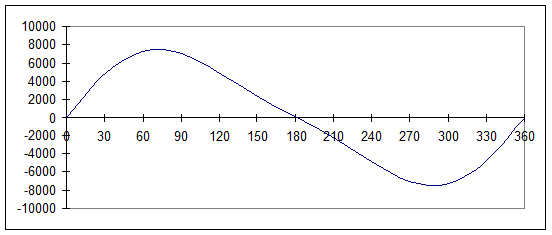
График ускорения точки В

2 Определение скоростей звеньев механизмов иглы и нитепритягивателя
Если точка звена находится в движении относительно стойки и относительно подвижной точки другого типа, то определяются нормальные ускорения для обоих движений, а касательные ускорения находятся графически. При этом вектор нормального ускорения точки при движении ее относительно стойки откладывается из полюса плана, а при движении относительно подвижной точки — из конца ускорения этой точки.
При определении скоростей и ускорений задается закон движения ведущего звена. Закон движения задается частотой и направлением вращения ведущего звена. Так как ведущим звеном является кривошип 1, его частота вращения постоянна, т.е. он вращается равномерно, а, следовательно, ωО1А = const . Направление движения ведущего звена — по часовой стрелке.
Скорости точек А (механизма иглы) и С (механизма нитепритягивателя) рассчитываются по формулам:
 (9)
(9)
 (10)
(10)
Векторы скоростей  и
и  направлены перпендикулярно радиусам О1 А и O1 Cв сторону вращения этих звеньев (Кv ,м/(с . мм) масштаб плана скоростей, который выбирается произвольно с учетом размеров чертежа).
направлены перпендикулярно радиусам О1 А и O1 Cв сторону вращения этих звеньев (Кv ,м/(с . мм) масштаб плана скоростей, который выбирается произвольно с учетом размеров чертежа).
 (11)
(11)
 (12)
(12)
План скоростей начинают строить с выбора произвольной точки на чертеже, которая называется полюсом скоростей (PV ). Скорости откладывают в соответствии с масштабом скоростей:
Скорость точки D на плане скоростей определяется путем совместного решения двух векторных уравнений, (она принадлежит звеньям 4 и 5) сложением векторов:
 (13)
(13)
 При определении скорости движения точки D за полюсы вращения принимаются точки С и О2 . В соответствии с правилами сложения векторов из конца первого вектора Vc провопят линию действия скорости
При определении скорости движения точки D за полюсы вращения принимаются точки С и О2 . В соответствии с правилами сложения векторов из конца первого вектора Vc провопят линию действия скорости  . Затем из полюса Pv проводят линию действия скорости
. Затем из полюса Pv проводят линию действия скорости  (
( так как первый вектор
так как первый вектор  = 0). Пересечение линий действия скоростей
= 0). Пересечение линий действия скоростей  и
и  определяет положение точки d на плане скоростей. Далее все векторы скоростей направляют к найденной точке d и получают длины векторов скоростей и в выбранном масштабе плана скоростей КV .
определяет положение точки d на плане скоростей. Далее все векторы скоростей направляют к найденной точке d и получают длины векторов скоростей и в выбранном масштабе плана скоростей КV .
Скорость движения точки Е, (глазка нитепритягивателя) определяют по двум векторным уравнениям:
 (14)
(14)
где  и
и 
Соединив полюс PV с точкой е, получают вектор скорости точки Е, т.е.
VE = VO . e результате построения треугольник cde должен быть подобен треугольнику CDE. Все стороны их должны быть взаимно перпендикулярны и сходственно расположены.
На основании подобия треугольников cde и CDE положение точки е на плане скоростей можно определить путем построения от линии cd треугольника cde подобного треугольнику CDE, не решая двух уравнений.
Положение точки е на плане скоростей можно найти также методом засечек.
Скорость движения точки В игловодителя определяют путем решения двух векторных уравнений:
 (15)
(15)
В соответствии с правилами сложения векторов из конца первого вектора  проводят линию действия скорости
проводят линию действия скорости  . Далее из полюса
. Далее из полюса  проводят линию действия скорости
проводят линию действия скорости  в направлении перемещения игловодителя (вертикально), так как первый вектор
в направлении перемещения игловодителя (вертикально), так как первый вектор  . Пересечение линий действия скоростей
. Пересечение линий действия скоростей  и определить положение точки в на плане скоростей.
и определить положение точки в на плане скоростей.
3 Определение ускорений звеньев механизмов иглы и нитепритягивателя и построение плана ускорений
 (16)
(16)
 (17)
(17)
При ω=const касательная составляющая ускорений  = 0,
= 0,  = 0.
= 0.
Для построения плана ускорений выбирается масштаб ускорений Ka ,м/(с 2 *мм), который рассчитывается как:
Ka =  (18)
(18)
Из произвольно выбранной точки — полюса плана ускорений откладывают (Ра ) -откладывают вектор ac =  направленный по линии CO1 кполюсу вращения О1 . В результате на плане ускоренийполучают точку с, к которой направлен вектор ao C = ac .
направленный по линии CO1 кполюсу вращения О1 . В результате на плане ускоренийполучают точку с, к которой направлен вектор ao C = ac .
Линейное ускорение точки D определяют путем решения следующих векторных уравнений:
 , (19)
, (19)
 где a02 = 0 (точка О2 неподвижна).
где a02 = 0 (точка О2 неподвижна).
Величины нормальных составляющих ускорений, входящих в систему уравнений (19) определяют по формулам:
 =
=  =
=  =
=  ; (20)
; (20)
 =
=  (21)
(21)



Векторы касательных составляющих ускорений, входящих в систему уравнений (10) на плане ускорений направляют следующим образом:

В соответствии с уравнением (10) из конца вектора  , т.е. точки с, на плане ускорений проводят вектор
, т.е. точки с, на плане ускорений проводят вектор  параллельно линии CD в направлении от точки D к полюсу вращения – точке С (вниз). Далее из конца вектора проводят перпендикуляр – линию действия
параллельно линии CD в направлении от точки D к полюсу вращения – точке С (вниз). Далее из конца вектора проводят перпендикуляр – линию действия  .
.
Во втором векторном уравнении (10) вектор  , поэтому из полюса ускорений
, поэтому из полюса ускорений  проводят вектор
проводят вектор  параллельно линии
параллельно линии  в направлении от точки
в направлении от точки  к точке
к точке  (влево). Из конца этого вектора проводят перпендикуляр к нему – линию действия
(влево). Из конца этого вектора проводят перпендикуляр к нему – линию действия  . Пересечение линий действий касательных ускорений определяет положение точки d на плане ускорений.
. Пересечение линий действий касательных ускорений определяет положение точки d на плане ускорений.
Соединив полюс плана ускорений точку с точкой d, получают вектор ускорения  . При этом все ранее построенные векторы направлены к точке d.
. При этом все ранее построенные векторы направлены к точке d.
Теорема подобия справедлива и для плана ускорений. Поэтому значительно проще найти положение точки е на плане ускорений, построив от линии cd треугольник cde, подобный треугольнику CDE на схеме механизма и сходственно с ним расположенный.
Для нанесения на план ускорений точки е можно использовать метод засечек так же, как и при построении плана скоростей. Для этого соответственно из точек d и c в нужном направлении делают засечки дуг радиусами, равными длине векторов  и
и  , мм:
, мм:
 (22)
(22)

На следующем этапе кинематического анализа из полюса плана ускорений откладывают вектор  направленный по линии ОА1 к полюсу вращения О1 . В результате на плане ускорений получают точку а, к которой направлен вектор
направленный по линии ОА1 к полюсу вращения О1 . В результате на плане ускорений получают точку а, к которой направлен вектор  .
.
Линейное ускорение точки В определяют путем решения следующих векторных уравнений:
 (23)
(23)
где  =0 (точка О1 неподвижна).
=0 (точка О1 неподвижна).
Вектор нормальный составляющей ускорения  , входящей в систему уравнений (23) определяют по формулам:
, входящей в систему уравнений (23) определяют по формулам:
 . (24)
. (24)
Вектор касательной составляющей ускорения  , входящих в систему уравнений (23) на плане ускорений направляют следующим образом:
, входящих в систему уравнений (23) на плане ускорений направляют следующим образом:  .
.
В соответствии с уравнениями (14) из конца вектора  , т.е. точки а, на плане ускорений проводят вектор параллельно линии АВ в направлении к полюсу вращения – точке
, т.е. точки а, на плане ускорений проводят вектор параллельно линии АВ в направлении к полюсу вращения – точке  . Далее из конца вектора проводят перпендикуляр – линию действия .
. Далее из конца вектора проводят перпендикуляр – линию действия .
Во втором векторном уравнении (14) вектор  , поэтому из полюса ускорений проводят вектор
, поэтому из полюса ускорений проводят вектор  параллельно линии
параллельно линии  в направлении к точке . Пересечение линий действий касательного ускорения и ускорения определяет положение точки в на плане ускорений.
в направлении к точке . Пересечение линий действий касательного ускорения и ускорения определяет положение точки в на плане ускорений.
Для нанесения на план ускорений точек центров тяжести, можно воспользоваться теоремой подобия. Например, для точки  — центра тяжести звена 5 – можно составить пропорцию:
— центра тяжести звена 5 – можно составить пропорцию:
 (25)
(25)
и полученный отрезок отложить из полюса по направлению к точке .
План ускорений позволяет определить линейное ускорение любой точки на всяком звене,  , используя следующие формулы:
, используя следующие формулы:
 (26)
(26)
Построив план линейных ускорений, можно определить угловые ускорения,  , звеньев механизма:
, звеньев механизма:
 (27)
(27)
Таблица 3: данные для построения ускорений механизмов иглы и нитепритягивателя
 |  |  |  |  | |
| 11 | 0,54 | 3,4 | 64 | 106 | 0,028 |
| 1 | 2,9 | 1,9 | 43 | 70 | 0,058 |
| 2 | 45,4 | 2 | 64 | 106 | 0,008 |
4 Силовой анализ механизма
Силовой анализ выполняется с целью определения усилий между звеньями в кинематических парах и уравнивающей силы и момента на главном валу. Эти задачи имеют большое практическое значение. На основании первой задачи решается вопрос о коэффициенте полезного действия машины, вторая задача позволяет определить необходимую мощность двигателя для приведения в действие машины.
Силовой анализ необходим для расчета прочности звеньев, кинематических пар и станин механизмов или машин при их проектировании.
Силовой анализ проводят в порядке, обратном кинематическому анализу, т.е. начинают с наиболее удаленных от ведущего звена структурных групп и заканчивают структурной группой первого класса, состоящей из стойки и ведущего звена, т.е. кривошипа.
Началом силового анализа является определение сил, действующих на звенья механизмов. Такими силами являются силы тяжести звеньев  , силы полезного сопротивления
, силы полезного сопротивления  , силы инерции
, силы инерции  и другие внешние силы.
и другие внешние силы.
Силы тяжести обычно определяются взвешиванием звеньев. Эти силы прикладываются в центрах тяжести звеньев. Силы полезного сопротивления зависят от выполняемого технологического процесса. Они устанавливаются экспериментально и прикладываются в рабочих точках механизма.
Силы инерции рассчитываются по формуле
 , (28)
, (28)
где m – масса звена, г;
 — ускорение центра тяжести звена, .
— ускорение центра тяжести звена, .

Силы инерции приложены в центре тяжести звена и направлены в сторону, противоположную его ускорению.
Если звено находится в сложном (плоскопараллельном) движении, то одновременно возникает сила инерции, направленная против ускорения центра тяжести, и момент пары сил инерции, направленный против углового ускорения звена.
Эта сила и момент заменяются одной результирующей силой инерции, равной произведению массы звена на ускорение его центра тяжести и приложенной в некоторой точке k.
Положение точки k, к которой приложена результирующая сила инерции, определяет плечо h, величина которого вычисляется по формуле
 , (29)
, (29)
где Мu – момент сил инерции
Is – момент инерции звена относительно оси, проходящей через центр тяжести звена; для стержня постоянного сечения;
 (30)
(30)
 — длина звена, м;
— длина звена, м;
 — угловое ускорение звена,
— угловое ускорение звена,  ;
;
m – масса звена, кг;
 — ускорение центра тяжести звена, .
— ускорение центра тяжести звена, .

Подставим числа в (30) формулу:

Подставим все в (29) формулу:
Для выполнения силового анализа строят схему механизма в определенном масштабе длин  , мм/мм, м/мм, и прикладывают в соответствующих точках звеньев действующие силы. После этого приступают к определению реакций в кинематических парах. Для швейных машин силовой анализ, как правило, выполняют без учета сил трения. Их учитывают при определении момента движущих сил, вводя коэффициент, равный 1,2-1,4.
, мм/мм, м/мм, и прикладывают в соответствующих точках звеньев действующие силы. После этого приступают к определению реакций в кинематических парах. Для швейных машин силовой анализ, как правило, выполняют без учета сил трения. Их учитывают при определении момента движущих сил, вводя коэффициент, равный 1,2-1,4.
Наиболее просто силовой анализ можно выполнить графическим способом – путем построения планов сил в некотором масштабе  , Н/мм. Поскольку при силовом анализе в расчет вводят силы инерции и реакции связей, то все силы, действующие на структурные группы 2 класса 2 порядка, находятся в равновесии. Поэтому векторное уравнение этих сил, равняется нулю, а многоугольник сил замкнут. Необходимо помнить, что кинематические цепи, имеющие степень подвижности w=0, в силовом отношении являются статически определенными. Условие статической определимости плоских кинематических цепей записывается в виде:
, Н/мм. Поскольку при силовом анализе в расчет вводят силы инерции и реакции связей, то все силы, действующие на структурные группы 2 класса 2 порядка, находятся в равновесии. Поэтому векторное уравнение этих сил, равняется нулю, а многоугольник сил замкнут. Необходимо помнить, что кинематические цепи, имеющие степень подвижности w=0, в силовом отношении являются статически определенными. Условие статической определимости плоских кинематических цепей записывается в виде:
 , (31)
, (31)
где n — число подвижных звеньев;
 — число кинематических пар 5 и 4 классов;
— число кинематических пар 5 и 4 классов;
3 – число уравнений статики, которое можно составить для каждого подвижного звена в плоскости.
В общем случае реакция в поступательной кинематической паре 5 класса известна лишь по направлению (перпендикулярно к направляющей), величина и точка ее положения неизвестны. Во вращательной кинематической паре 5 класса известна точка приложения реакции (в центре шарнира), величина же и направление ее неизвестны. В кинематической паре 4 класса известны точка приложения (в точке касания) и направление (перпендикулярно касательной к профилям кривых) реакции. Неизвестна лишь ее величина.
Для уравновешивания кинематической цепи 1 класса вводят уравновешивающий момент  или уравновешивающую силу
или уравновешивающую силу  . Связь между и устанавливается уравнением:
. Связь между и устанавливается уравнением:
 , (32)
, (32)
где  — плечо силы относительно оси вращения кривошипа.
— плечо силы относительно оси вращения кривошипа.
При силовом анализе при вращательном движении кривошипа вводят уравновешивающий момент.
Применительно к механизму иглы универсальной швейной машины 1022 класса силовой анализ выполняется в следующей последовательности.
Силовой анализ начинают со структурной группы наиболее удаленной от ведущего звена, т.е. со звена II класса, 2 порядка А-2- -3-В. Эту цепь мысленно отсоединяют от ведущего звена 1 и стойки 0, при этом вводятся реакции
-3-В. Эту цепь мысленно отсоединяют от ведущего звена 1 и стойки 0, при этом вводятся реакции  и
и  . Индексы на обозначениях реакций и кинематических пар принято ставить со стороны отсоединенного звена на рассматриваемое. Реакция неизвестна по величине и направлению, реакция приложена в точке В и линия ее действия перпендикулярна направляющей ползуна.
. Индексы на обозначениях реакций и кинематических пар принято ставить со стороны отсоединенного звена на рассматриваемое. Реакция неизвестна по величине и направлению, реакция приложена в точке В и линия ее действия перпендикулярна направляющей ползуна.
Реакцию раскладывают на две составляющие: по звену АВ и перпендикулярно этому звену, т.е.
 . (33)
. (33)
Векторное уравнение сил, действующих на рассматриваемую кинематическую цепь имеет вид:
 . (34)
. (34)
Сила полезного сопротивления  действует не во всех положениях механизма, а лишь при рабочем ходе иглы.
действует не во всех положениях механизма, а лишь при рабочем ходе иглы.
Как видно из уравнения (34) силы  известны полностью по величине, направлению и точке положения. В случае, когда силы тяжести малы по сравнению с другими силами, их можно не учитывать.
известны полностью по величине, направлению и точке положения. В случае, когда силы тяжести малы по сравнению с другими силами, их можно не учитывать.
В уравнении (34) не вошли реакции  , действующие между звеньями 2 и 3, приложенные в точке В. Эти реакции взаимно уравновешиваются внутри структурной группы. Они относятся к разряду внутренних сил. Эти силы определяются на последующих этапах силового анализа.
, действующие между звеньями 2 и 3, приложенные в точке В. Эти реакции взаимно уравновешиваются внутри структурной группы. Они относятся к разряду внутренних сил. Эти силы определяются на последующих этапах силового анализа.
В уравнении (34) имеются три неизвестные силы, и для их определения рассматривается равновесие звена 2. Для этого звена векторное уравнение сил имеет следующий вид:
 (35)
(35)
Для определения  необходимо составить уравнение моментов сил относительно точки В:
необходимо составить уравнение моментов сил относительно точки В:
 (36)
(36)
Моменты сил  и
и  равны нулю, так как их плечи равны нулю. Тогда:
равны нулю, так как их плечи равны нулю. Тогда:
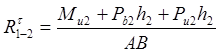 (37)
(37)

Для получения составляющей реакции с минусом следует повернуть ее на  .
.
Далее приступают к построению плана сил. Выбирают произвольную точку  и откладывают от нее в соответствии с уравнением (34) поочередно в масштабе векторы известных сил.
и откладывают от нее в соответствии с уравнением (34) поочередно в масштабе векторы известных сил.
Модули (величины) векторов сил зависят от выбранного масштаба сил  , Н/мм, т.е.
, Н/мм, т.е.
 (38)
(38)
Из конца последнего вектора силы  проводят линию действия силы перпендикулярно направляющей игловодителя (горизонтально), а из начальной точки проводят линию действия
проводят линию действия силы перпендикулярно направляющей игловодителя (горизонтально), а из начальной точки проводят линию действия  параллельно АВ. Точка
параллельно АВ. Точка  пересечения последних двух линий будет концом вектора силы и началом составляющей реакции. В соответствии с уравнением (34) заменяют составляющие и
пересечения последних двух линий будет концом вектора силы и началом составляющей реакции. В соответствии с уравнением (34) заменяют составляющие и  на полную величину реакции
на полную величину реакции  . Из плана сил получают:
. Из плана сил получают:

Затем определяют реакцию  , приложенную в шарнире
, приложенную в шарнире  . Для этого используют имеющийся уже план сил и уравнение (36). Очевидно, реакция будет направлена по прямой линии, замыкающей начало и конец
. Для этого используют имеющийся уже план сил и уравнение (36). Очевидно, реакция будет направлена по прямой линии, замыкающей начало и конец  . Тогда
. Тогда
На следующем этапе силового анализа рассматривают структурную группу 1 класса  . Векторное уравнение сил записывают в следующем виде:
. Векторное уравнение сил записывают в следующем виде:
 (39)
(39)
где  , равная .
, равная .
Для определения  сразу строят план сил в том же масштабе
сразу строят план сил в том же масштабе  . Начиная от точки проводят векторы ,
. Начиная от точки проводят векторы ,  ,
,  . Конец последнего вектора соединяют с точкой — началом вектора . Значение реакции составляет:
. Конец последнего вектора соединяют с точкой — началом вектора . Значение реакции составляет:
Величину уравновешивающего момента определяют, составив уравнение моментов сил, действующих на первое звено относительно точки , т.е.
 (40)
(40)
Знаки «+» и «-» показывают истинное направление .
Планы сил строят для нескольких положений механизма, из которых находят наибольшее значение сил и реакций. Эти значения сил используют в расчетах на прочность деталей механизмов и кинематических пар машины.
Таблица 4: данные для силового анализа механизма и для построения плана сил
 |  |  |  |  |  | h | |
| 11 | 86 | 41 | -51,6 | 316,8 | -6536 | -186663,9 | 0,0014 |
| 1 | 60 | 50 | -68,4 | 316,8 | -456 | -12943,9 | 0,0024 |
| 2 | 61 | 88 | -103,2 | 316,8 | -463 | -13119,9 | 0,0042 |
Выполняя курсовой проект, я обобщила, углубила и закрепила знания, полученных мною на лекциях и при выполнении лабораторных работ по дисциплине «Оборудование для швейного производства и основы проектирования оборудования», и их применение при решении технических, технологических, научных и экономических задач, возникающих при проектировании швейного оборудования.
Также в процессе работы я ознакомилась с основными этапами проектирования швейного оборудования, изучила технологический процесс, осуществляемый на универсальной швейной машине, научилась составлять и анализировать кинематические схемы исполнительных механизмов. Еще я освоила методику проведения перемещений, скоростей, ускорений звеньев механизмов и их отдельных точек, научилась устанавливать законы изменения во времени этих величин, определять силы, действующие на звенья механизмов, реакции в кинематических парах и давления на станину машины. Таким образом, я научилась решать задачи кинематического и динамического анализа механизмов, необходимого для выполнения расчетов проектируемого швейного оборудования.
При выполнении курсового проекта я учитывала основные задачи, стоящие перед швейной промышленностью по техническому перевооружению производства, применению современных средств механизации и автоматизации оборудования, созданию конкурентоспособного оборудования, экономному использованию материальных и трудовых ресурсов.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Теория механизмов и механика машин [Текст]: учеб. для втузов/К. В. Фролов [и др.]; Изд. 4-е, испр.; М.: Высш. шк., 2003. 496 с.: ил.
2. Иосилевич Г. Б. Прикладная механика [Текст]: учеб. для вузов/ Под ред. Г. Б. Иосилевича; М.: Высш. шк., 1989. 351 с.: ил.
3. Оборудование швейного производства [Текст]: учеб. для вузов/ Вальщиков Н. М.; М.: Легкая индустрия, 1977, 520 с.: ил.
4. Вальщиков Н. М. Расчет и проектирование машин швейного производства [Текст]: учеб. для вузов/ Н. М. Вальщиков; Л.; Машиностроение, 1973, 343 с.
5. Гарбарук В. П. Расчет и конструирование основных механизмов челночных швейных машин [Текст]: учеб. для вузов/ В. П. Гарбарук; Л.; Машиностроение, 1977, 231 с.
6. Лабораторный практикум по машинам и аппаратам швейного производства [Текст]: учеб. пособие/ Б. А. Рубцов; М.: Легпромбытиздат, 1995, 256 с.
Рисунок 1.1 Пространственная кинематическая схема механизмов иглы и нитепритягивателя машины 1022 кл.
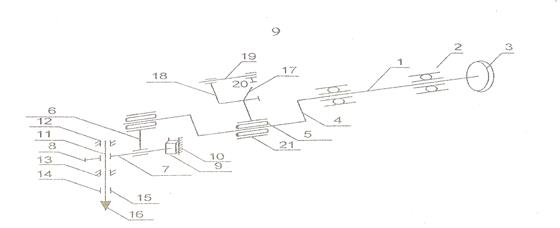
2 – втулки направляющие – подшипники скольжения
3 – шкив (маховик)
4 – кривошип игловодителя с противовесом
5 – палец кривошипа
7 – поводок (шарнирная шпилька)
8 – стягивающий винт
10 – направляющий паз
12, 13 – втулки игловодителя (верхняя и нижняя)
15 – упорный винт для крепления иглы
17 – рычаг нитепритягивателя, надетый на внутреннее плечо пальца 5
18 – соединительное звено
19 – шарнирный палец
20 – установочный винт для закрепления пальца в корпусе машины







