Кинематическая схема подъемной машины
Кинематические схемы показывают взаимодействие узлов и деталей механизма. Все детали и узлы на кинематических схемах изображают в виде условных обозначений.
Чтобы уяснить принцип построения кинематических схем, разберем кинематическую схему лебедки Т-224В (рис. 1), используемой в механизме подъема подъемников С-953 и С-953-1. Кинематические схемы механизмов подъема дают возможность проследить способ передачи вращения от электродвигателя к приводным деталям механизма (барабану лебедки, канатоведущему шкиву и т. д.).
Рекламные предложения на основе ваших интересов:
Рис. 1. Кинематическая схема лебедки Т-224В:
1 — двигатель, 2 — вал двигателя, 3 — тормоз, 4 — эластичная муфта, 5 — входной (ведущий) вал редуктора, 6 — корпус редуктора, 7 — промежуточный вал редуктора, 8 — выходной (ведомый) вал редуктора, 9 — барабан, 10 — подшипник
Любую кинематическую схему начинают рассматривать с привода. В приведенном примере приводом служит электродвигатель на лапах, которыми он крепится к станине. Вал электродвигателя соединен с помощью эластичной муфты с входным (ведущим) валом редуктора типа РМ-350-Ш-4 с передаточным отношением 31,5. Передаточным отношением редуктора называется отношение угловых скоростей вращения входного и выходного валов. Редуктор предназначен для передачи вращения от быстроходного (входного) вала к тихоходному (выходному). При уменьшении частоты вращения этих валов во столько же раз увеличивается крутящий момент, передаваемый быстроходным валом тихоходному.
Валы редуктора вращаются в подшипниках. Выходной вал соединен жестко с барабаном. Второй конец барабана опирается на ось, закрепленную в сферическом подшипнике выносной опоры.
Часто на кинематических схемах указывают также и номера подшипников, которые применены в данном механизме.
Пользуясь кинематической схемой, можно представить работу механизма, подсчитать передаточное отношение редуктора и каждой пары и определить линейные скорости вращения барабана, ходового колеса или приводной шестерни.
Горные машины




Основы кинематики канатного подъема.
В кинематике подъемных установок рассматриваются скорости, ускорения и пути подъемных сосудов в функции времени. Совокупность численных значений элементов движения составляет кинематический режим подъемной установки. Наиболее полно кинематический режим характеризуется диаграммой скорости (тахограммой) подъема, графически изображающей в зависимости скорости v от времени за один цикл подъема.

При клетевом подъеме используются простые тахограммы (рис. 8.9, а), имеющие три периода: ускоренного движения t 1, установившегося движения t 2 с постоянной максимальной скоростью v max и замедленного движения t 3. После этого следует пауза продолжительностью т, и диаграмма скорости повторяется. Наиболее удобны диаграммы с постоянными ускорениями а1 и а3 во время разгона и замедления машины, имеющие форму трапеции.
Площадь тахограммы численно равна высоте подъема H . Время t 1 и путь h подъемного сосуда во время разгона составляют:
Кинематическая схема подъемной машины
Общие сведения о кинематических схемах строительных подъемников
Кинематические схемы показывают взаимодействие узлов и деталей механизма. Все детали и узлы на кинематических схемах изображают в виде условных обозначений (табл. 2).
Чтобы уяснить принцип построения кинематических схем, разберем кинематическую схему лебедки Т-224В (рис. 3), используемой в механизме подъема подъемников С-953 и С-953-1. Кинематические схемы механизмов подъема дают возможность проследить способ передачи вращения от электродвигателя к приводным деталям механизма (барабану лебедки, канатоведущему шкиву и т. д.)..
Любую кинематическую схему начинают рассматривать с привода. В приведенном примере приводом служит электродвигатель 1 на лапах, которыми он крепится к станине. Вал 2 электродвигателя соединен с помощью эластичной муфты 4 с входным (ведущим) валом 5 редуктора типа РМ-350-Ш-4 с передаточным отношением 31,5. Передаточным отношением редуктора называется отношение угловых скоростей вращения входного и выходного • валов. Редуктор предназначен для передачи вращения от быстроходного (входного) вала к тихоходному (выходному). При уменьшении частоты вращения этих валов во столько же раз увеличивается крутящий момент, передаваемый быстроходным валом тихоходному.
Одна из полумуфт эластичной муфты служит шкивом колодочного тормоза 3. На входном валу 5 редуктора, соединяющемся с валом электродвигателя, жестко закреплено ведущее зубчатое колесо (шестерня) z1, с которым находится в зацеплении промежуточное зубчатое колесо z2, установленное на промежуточном валу 7. Колеса z, и z2 имеют соответственно 14 и 85 зубьев. Второе ведущее зубчатое колесо z3 на промежуточном валу 7 (z3=16) входит в зацепление с колесом z4= 83 на выходном (ведомом) валу 8 редуктора.
Валы редуктора вращаются в подшипниках. Выходной вал 8 соединен жестко с барабаном 9. Второй конец барабана опирается на ось, закрепленную в сферическом подшипнике 10 выносной опоры.
Часто на кинематических схемах указывают также и номера подшипников, которые применены в данном механизме.
Пользуясь кинематической схемой, можно представить работу механизма, подсчитать передаточное отношение редуктора и каждой пары и определить линейные скорости вращения барабана, ходового колеса или приводной шестерни.

Рис. 3. Кинематическая схема лебедки Т-224В:
1 — двигатель, 2 — вал двигателя, 3 — тормоз, 4 — эластичная муфта, 5 — входной (ведущий) вал редуктора,
6 — корпус редуктора, 7 — промежуточный вал редуктора, S — выходной (ведомый) вал редуктора, 9 — барабан,
10 — подшипник
Общие сведения о шахтной подъемной установке
Назначение машины
Шахтные одно- и двухбарабанные подъемные машины новой конструкции предназначены для подъема и спуска людей и груза по вертикальным и наклонным горным выработкам.
Машины применяют для оборудования поверхностных и подземных подъемных установок вертикальных и наклонных горных выработок шахт и рудников угольной и горнорудной промышленности.
Машины могут работать в среде, опасной по газу или пыли, и могут быть применены для оборудования проходческих подъемных установок.
Техническая характеристика машины 2Ц – 1,6х0,8
Технические характеристики машин новой конструкции приведены в табл.1. Машины новой конструкции имеют более высокие нагрузки и скорости подъема, а соответственно большую производительность.
Индексы в обозначении типоразмеров машин новой конструкции имеют следующую расшифровку:
первое число 1 или 2 — число барабанов;
второе число 1,6 или 3 — диаметр барабана, м;
третье число 0,8; 1,5 или 2 — ширина барабана, м;
Техническая характеристика двухбарабанной подъемной машины
| Диаметр барабана, мм | |
| Ширина барабана, мм | |
| Число барабанов | |
| Статическое натяжение каната наибольшее, кН | |
| Разность статических натяжений двух канатов наибольшая, кН | |
| Диаметр каната наибольший, мм | |
| Тип редуктора и его исполнение для машин с правым расположением . | ЦДН-130-1 |
| Приведенная масса вращающихся частей машины к диаметру навивки каната, кг, при передаточном числе редуктора i=20 (30) | 18557,6 |
| Масса машины без электрооборудования, кг |
Описание конструкции
Все машины состоят из одинаковых узлов и отличаются только наличием одного или двух барабанов и конструктивными размерами их узлов.
Конструктивные размеры подъемных машин определены по наибольшим усилиям и скоростям и представлены на рис.3.
Конструкция машины не требует подвального помещения и позволяет их применять как под землей, так на поверхности на эксплуатационных и проходческих подъемных установках.
При использовании машин с полной либо неполной нагрузкой мощность их электродвигателя в каждом отдельном случае подлежит уточнению расчетным путем.

Рис 3 Шахтная двухбарабанная подъемная машина 2Ц-1,6х0,8
Кинематическая схема подъемной машины показана на рис.4 с указанием мест расположения аппаратов встроенного электрооборудования.

Рис. 4. Кинематическая схема шахтной двухбарабанной подъемной машины:
1 – зубчатая муфта; 2 – редуктор; 3 – привод к аппарату задания и контроля хода (АЗК);
4 –электродвигатель; 5 – зубчатая муфта; 6 – реле оборотов механическое;
7 – тахогенератор; 8 – выключатель; 9 – блокировка от провисания каната; 10 – правый верхний канат; 11 –барабан рабочий (заклиненный); 12 – левый нижний канат; 13 – барабан переставной (холостой); 14 – конечные выключатели; 15 – механизм перестановки барабанов; 16 – подвод сжатого воздуха к механизму перестановки барабанов
Подъемные машины новой конструкции имеют отъемные редукторы двухступенчатые с жесткими межцентровыми расстояниями, с зацеплением Новикова. (рис.5)
Отъемный редуктор представляет собой самостоятельный узел, который может быть расположен с правой либо с левой стороны барабанов и соединен зубчатыми муфтами с главным валом электродвигателя. Редукторы выполняют с несколькими передаточными числами. Все валы редукторов установлены на подшипниках качения. Смазка зубьев колес редукторов осуществляется окунанием в масляную ванну и разбрызгиванием.
Техническая характеристика редуктора приведена в табл. 2.

Рис. 5. Редуктор ЦДН-130-1:
1 — зубчатое колесо с главным валом; 2 — вал-шестерня промежуточного вала; 3 — колесо зубчатое промежуточного вала; 4 — вал-шестерня приводного вала; 5 — корпус редуктора; 6 — крышка; 7 —указатель уровня масла; 8 — центробежное реле;
Основные кинематические схемы механизмов подъема груза.
Механизмы подъема грузаустанавливаются на всех грузоподъемных машинах. Их конструкция и методы расчета характерны не только для кранов общего, но и для машин специального назначения. В данной теме приведены кинематические и энергосиловые расчеты приводов.
Механизмы подъема груза – это механизм, предназначенный для вертикального перемещения груза и состоящий из полиспастной системы и лебедки.
Грузовые лебедкиможно использовать не только в механизмах подъема груза, но и в механизмах изменения вылета стрелы, а также в качестве тяговых лебедках на кранах и других подъемно-транспортных машинах.
Грузовая лебедка – это машина для подъема грузов канатом, навиваемым на барабан.
В подъемных механизмах применяют в основном силовые полиспасты для уменьшения усилия в канате и снижения передаточного числа редуктора.
Полиспаст – это система подвижных и неподвижных блоков, огибаемых канатом или цепью, которая предназначена для выигрыша в силе – силовые полиспасты или скорости – скоростные полиспасты.
Классификация механизмов подъема грузов.
1. В зависимости от конструктивной схемы их можно разделить на два основных типа:
— с жесткой кинематической схемой — канатным или цепным приводом, ходовым винтом или зубчатой рейкой;
— с фрикционным приводом — канатоведущнм шкивом (применяется только в подъемниках).
2. По типу и количеству двигателей приводы бывают:
— электрические (основной привод) одно- и двухдвигательные;
Наиболее широко применяют канатные лебедки с электроприводом; довольно перспективными являются механизмы подъема с гидроприводом. В пожаро- и взрывоопасных производствах применяют пнемопривод в механизмах подъема грузов.
3. По типу передач механизмы подъема бывают:
— с цилиндрическим редуктором;
— с планетарным редуктором;
— с волновым редуктором (последние пока не нашли должного применения).
Червячные передачи в механизмах подъема устанавливают редко по причине низкого к. п. д. и повышенного износа.
Механизмы подъема груза, кинематические схемы которых даны на рисунке 6.1, состоят из следующих основных частей: полиспаста, грузозахватного устройства, барабана, редуктора, тормоза и двигателя.
Кинематическая схема механизма подъема с крюковой подвескойпоказана на рисунке 6.1, а. Электродвигатель 1 соединен с цилиндрическим редуктором 4 и барабаном 5 при помощи муфт 2, 3; полумуфта 3 со стороны редуктора выполнена с тормозным шкивом, на котором установлен колодочный тормоз. Редукторы могут выполняться с валами по обе стороны для различной компоновки механизмов подъема. На барабан наматывается канат полиспаста 6 с грузозахватным приспособлением 7.
Кинематическая схема механизма подъема с грузовым электромагнитным захватом 8 отличается от обычной наличием дополнительного барабана 9 для наматывания и сматывания токоподводящего кабеля при подъеме и опускании груза (рисунок 6.1, б). Привод этого барабана может осуществляться от канатного барабана с помощью зубчатой или ценной передач, а также от отдельного привода. Вследствие различных скоростей наматывания ветвей каната и кабеля передаточное число передачи 10 между барабанами будет равно
 (6.1)
(6.1)
где  ,
,  — угловые скорости вращения соответственно канатного и кабельного барабанов;
— угловые скорости вращения соответственно канатного и кабельного барабанов;
 (6.2)
(6.2)
 — скорость подъема груза, м/с;
— скорость подъема груза, м/с;  — передаточное число полиспаста;
— передаточное число полиспаста;
 , (6.3)
, (6.3)
 ,
,  — диаметры канатного и кабельного барабанов.
— диаметры канатного и кабельного барабанов.
 (6.4)
(6.4)
В грейферных кранах на тележке устанавливают два одинаковых механизма — один для подъема, другой для замыкания грейфера (рисунок 6.1, в) или двухбарабанную лебедку с планетарной передачей и двумя двигателями (большей мощности для подъема, меньшей — для замыкания грейфера).
 |
Рисунок 6.1 – Кинематические схемы механизмов подъема груза
Механизмы с планетарными редукторами. На рисунке 6.1, г показана кинематическая схема механизма с двухдвигательным приводом и планетарным редуктором. Валы электродвигателей 1, 5 соосны и вращают центральные колеса z1 и z2 различных диаметров. Колеса z1 и z2 приводят во вращение сателлит z4, укрепленный в водиле 3, которое связано с приводной шестерней двухступенчатого редуктора 6, который вращает барабан 7 Вал двигателя 1 проходит внутри пустотелого вала, соединяющего водило с шестерней редуктора.
Механизм подъема позволяет работать на четырех скоростях: 1 — максимальная скорость при вращении обоих двигателей в одном направлении; 2— при вращении только двигателя 1; 3 — при вращении только двигателя 5; 4 — минимальная при вращении двигателей 1 и 5 в противоположных направлениях.
Схема механизма подъема с гидроприводом приведена на рисунке 6.1, д. Особенностью этого механизма является широкий диапазон изменения скоростей, что очень важно для монтажных и механосборочных кранов. Электродвигатель 1 приводит в движение регулируемый насос 2, от которого жидкость под высоким давлением поступает в высокомоментный гидромотор 3 (радиально-поршиевой с дисковым тормозом). От него через муфту и редуктор 4 сообщается вращение барабану 5.
В отдельных случаях применяют механизм подъема груза с открытой зубчатой передачей вместо трехступенчатого редуктора (рисунок 6.1, е). Этот механизм состоит из двигателя 1, муфты с тормозным шкивом 2, тормоза 3, редуктора 4, открытой зубчатой пары 5, барабана 6. С целью обеспечения правильной укладки каната на барабан с многослойной навивкой используют специальное устройство – канатоукладчик (рисунок 6.1, ж). Подъемный канат перед навивкой на барабан 1 проходит через блок 2 между двумя цилиндрическими роликами 4, установленными на каретке 6. Каретка расположена на винте 7 с двойной резьбой, который приводится в движение цепной передачей 3. При вращении винта 7 каретка 6 перемещается по направляющими, обеспечивая правильную укладку каната.
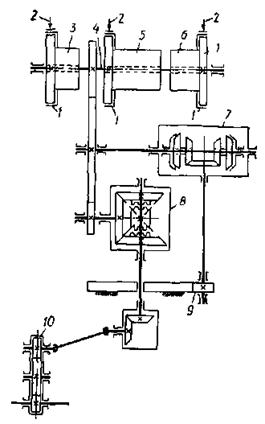
Рисунок 6.2 – Механизм подъема автомобильного крана <с групповым приводом)
Механизмы подъема с групповым приводом. От двигателя внутреннего сгорания автомобиля (рисунок 6.2) движение через редуктор отбора мощности 10, пару конических передач, главный реверс 8, зубчатые передачи передается к барабанам механизма подъема 5, механизма замыкания грейфера 6, механизма изменения вылета 3.
Соединение барабанов с главным валом 4 обеспечивается с помощью фрикционных муфт 1, а торможение – с помощью тормозов 2, располагаемых непосредственно на барабанах этих механизмов. Включение фрикционной муфты сопровождается растормаживанием барабана. С помощью зубчатого реверса 7, зубчатой передачи 9 ведется управление работой крана при повороте.
Полиспасты.
Существуют два основных типа полиспастов: силовые полиспасты и скоростные полиспасты.
Силовой полиспаст – это полиспаст, служащий для выигрыша в силе.
Скоростной полиспаст – это полиспаст, служащий для выигрыша в скорости.
Скоростные полиспасты находят ограниченное применение в тихоходных гидравлических и пневматических механизмах. Блоки в полиспасте делятся на подвижные, перемещающиеся в пространстве, и неподвижные.
Силовые и скоростные зависимости двух типов полиспастов можно проследить на соответствующих подвижных блоках.
Для силового полиспаста (рисунок 6.3, а) натяжение SK и скорость ветви u K каната:
 (6.5)
(6.5)
где Q Г – вес поднимаемого груза, u Г — скорость подъема груза; h — к. п. д. блока.
Для скоростного полиспаста (рисунок 6.3, б) сила на поршне и его скорость будут равны:
 (6.6)
(6.6)
К. п. д. канатного блока учитывает потери на трение в опорах и жесткость каната; h=0,98 для блоков на подшипниках качения и h=0,95 для блоков на подшипниках скольжения.
 |
Рисунок 6.3 – Полиспасты для выиграша в силе (а) и скорости (б)
По конструкции полиспасты бывают одинарные и сдвоенные.
Одинарный полиспаст – это полиспаст, у которого один конец каната подвижный (наматывается на барабан лебедки), а второй – закреплен на подвижной или неподвижной обойме, то есть системе блоков.
Сдвоенный полиспаст – это полиспаст, у которого оба конца каната подвижны, то есть наматываются на барабан.
Одинарные полиспасты. Верхние блоки (обойма) неподвижны (в пространстве), нижние блоки (обойма) подвижны – перемещаются вместе с грузом (рисунок 6.4).
Недостатком одинарных полиспастов является то, что вместе с подъемом груз перемещается также по горизонтали, вследствие чего изменяются величины реакции опор барабана и затрудняется точность установки груза.
 |
 |
Рисунок 6.4 – Одинарные полиспасты:
а – при сбегании каната с неподвижной обоймы, б – при сбегании каната с подвижной обоймы
Для того, чтобы при работе полиспаста большой кратности не происходил перекос подвижной обоймы используются сдвоенные полиспасты (рисунок 6.5). Сдвоенные полиспасты обеспечивают строго вертикальное перемещение груза, реакции в опорах барабана распределяются равномерно.
 |
 |
Рисунок 6.5 – Сдвоенные полиспасты:
а – при сбегании канатов с неподвижной обоймы, б – при сбегании каната с подвижной обоймы
Сдвоенный полиспаст состоит из двух одинарных полиспастов с уравнительным блоком. На барабан (с правой и левой винтовой нарезкой) навиваются две ветви каната полиспаста.
Уравнительный блок – это блок, служащий для уравнивания длин правой и левой ветвей каната сдвоенного полиспаста при неравномерной вытяжке.
Уравнительный блок при подъеме (опускании) груза не вращается. Диаметр уравнительного блока принимают меньше, чем у основних блоков, и располагается он по оси симметрии сдвоенного полиспаста: в верхней обойме при четной (рисунок 6.5, б) и в нижней (рисунок 6.5, а) при нечетной кратности.
Полиспасты характеризуются кратностью или передаточным числом u П. Кратность силового полиспаста показывает – во сколько раз позволяет этот полиспаст выиграть в силе.
Кратность полиспаста – это отношение скорости навивки каната на барабан к скорости подъема груза.
Кратность полиспаста определяется по формуле:
 (6.7)
(6.7)
где  — скорость каната, наматываемого на барабан,
— скорость каната, наматываемого на барабан,  — скорость подъема груза.
— скорость подъема груза.
С другой стороны, кратность одинарного полиспаста равняется числу ветвей каната, на которых висит груз. Для сдвоенных полиспастов кратность равна половине числа ветвей, на оторых висит груз.
Для одинарного полиспаста m является кратностью или передаточным числом = m.
Кратность сдвоенного полиспаста
 , (6.8)
, (6.8)
где m – число ветвей каната полиспаста, на которых висит груз.
Кратность полиспастов механизмов подъема зависит от грузоподъемности и определяется технико-экономическими расчетами. Чем больше кратность полиспаста, тем меньше диаметры каната (но не менее допустимого), блоков и барабана и меньше передаточное число редуктора, масса и габариты, но с другой стороны при этом увеличиваются длины каната, барабана и число блоков.
На основании технико-экономических расчетов и практического опыта установлены пределы оптимальных значений кратности полиспастов в зависимости от грузоподъемности кранов общего назначения:
Q Г, т 5 10…15 20…30 40…50 75…125
В неподвижном полиспасте сила натяжения во всех каната одинакова:
 (6.9)
(6.9)
При подъеме груза вследствие потерь в блоках на трение и от жесткости каната при изгибе натяжение в ветвях каната распределяются неравномерно. Поэтому эти потери учитываются к. п. д. полиспаста h ПОЛ.
Вывод к. п. д. одинарного полиспаста.
Пусть дан одинарный полиспаст (рисунок 6.6), у которого канат сбегает с подвижного блока. Примем, что к. п. д. блоков известно и к. п. д. подвижных и неподвижных блоков равны.
N ПОЛ – полезная мощность, затрачиваемая на подъем груза,
N ПОЛН – полная мощность, затрачиваемая на подъем груза,
SK, u K – усилие и скорость каната, который наматывается на барабан лебедки,
Q Г, u Г – вес и скорость поднимаемого груза,
 |
Рисунок 6.6 – Расчетная схема одинарного полиспаста
К. п. д. полиспаста – это отношение полезной мощности к полной мощности, затрачиваемой на подъем груза,
 (6.10)
(6.10)
Как видно из расчетной схемы полиспаста, представленного на рисунке 6.6, усилие в ветви каната, идущего на барабан лебедки, везде одинаково и составляет S1=SK.
Когда канат пройдет через нижний блок, усилие во второй ветви каната будет меньше из-за потерь на трение, которое учитываем к. п. д. блока, тогда S2=S1×h=SK×h.
Когда канат пройдет через верхний блок, усилие в третьей ветви каната будет S3=S2×h=SK×h 2 и т.д.
Тогда усилие в n-ой ветви каната составит Sn=SК×h n -1 .
Составим уравнение равновесия системы, представленной на рисунке 6.6,
 (6.11)
(6.11)
Вынесем SК за скобки:

Разделим полученное уравнение на SК

Подставим полученное выражение в уравнение (6.10) и определяем к. п. д. одинарного полиспаста, у которого канат сбегает с подвижной обоймы,
 . (6.12)
. (6.12)
Аналогично можно вывести к. п. д. одинарного полиспаста, у которого канат сбегает с неподвижной обоймы. В результате получим:
 . (6.13)
. (6.13)
Тогда при одинарном полиспасте усилие в канате, наматываемом на барабан лебедки, с учетом потерь на трение составит:
 (6.14)
(6.14)
При сдвоенном полиспасте усилие в одной ветви каната, наматываемом на барабан лебедки, с учетом потерь на трение составит:
 (6.15)
(6.15)
где m – число ветвей каната полиспаста, на которых висит груз.







