- Лекция 5 Кинематические схемы
- Устройство и основные части швейной машины
- Схема устройства швейной машины
- Отличие разных видов швейных машин
- Основные узлы и механизмы швейной машины
- Термины, используемые в названиях деталей
- Устройство и принцип работы швейной машины
- Работа челночного механизма
- Шпулька
- Устройство для протяжки материи
- Натяжение ниток
- Устройство намотки
- Разработка кинематической схемы машины.
Лекция 5 Кинематические схемы




Кинематическая схема – это схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины и из взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения без соблюдения размеров и пропорций.
Все элементы на схеме обозначают условными графическими обозначениями согласно ГОСТ 2.770-68 ЕСКД Обозначения условные графические в схемах.
Кинематические схемы выполняют в соответствии с требованиями
ГОСТ 2.703-2011 ЕСКД Правила выполнения кинематических схем.
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. На схеме он обозначается, как правило, окружностью с буквой М в середине.
Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
Основные условные обозначения
| Наименование | Обозначение |
| Вал, валик, ось, стержень, шатун и т.п. |  |
| Подшипники скольжения и качения на валу (без уточнения типа) |  |
| Муфта. Общее обозначение без уточнения типа |  |
| Передачи фрикционные: а) с цилиндрическими роликами |  |
| Передача ремнем без уточнения типа ремня |  |
| Передача плоским ремнем |  |
| Передача клиновым ремнем |  |
| Наименование | Обозначение |
| Передача круглым ремнем |  |
| Передача зубчатым ремнем |  |
| Передача цепью, общее обозначение без уточ- нения типа цепи |  |
| Передачи зубчатые (цилиндрические): а) внешнее зацепление (общее обозначение без уточнения тина зубьев) |  |
| б) то же, с прямыми, косыми и шевронными зубьями |  |
| Передачи зубчатые с пересекающимися валами, конические |  |
| Наименование | Обозначение |
| Передачи зубчатые со скрещивающимися валами: а) червячные с цилиндрическим червя ком | 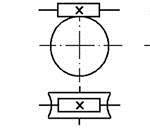 |
| б) червячные глобоидные |  |
| Передача винт-гайка |  |
| Электродвигатель |  |
Пример описания кинематической схемы:

Вращательное движение от электродвигателя 1 через муфту(упругую) 2 передается на вал Ӏ с зубчатым колесом 3 ( обычно это шестерня), которое зацепляется с зубчатым колесом 4 второго вала ӀӀ. Зубчатая передача является цилиндрической косозубой и расположена в корпусе 5. На вал ӀӀ насажен звездочка 6 цепной передачи. С помощью цепи движение передается на выходной вал ӀӀӀ через вторую звездочку. Опорами валов являются подшипники.
Устройство и основные части швейной машины
Приспособление предназначено для самостоятельного выполнения манипуляций в швейной сфере деятельности. С ее наличием можно легко повысить производительность, полностью облегчить трудовой процесс швеи. Применяется в домашних условиях, ведь с ее помощью можно сделать ровные стежки даже новичку, который никогда не пользовался иголкой.
Схема устройства швейной машины
Пользователь может видеть только внешнюю часть машины и ее рабочие детали, которые находятся снаружи устройства. Однако внутри расположен сложный механизм, понятный только профессионалам.
Главной деталью любой модели, даже самой современной, принято считать челнок. Производится он из качественной древесины, его основной задачей является перекладывание поперечных волокон в процедуре выработки ткани. К базовым частям, без которых не обходится ни один агрегат, можно отнести следующие составляющие:
- Маховик;
- Рукав;
- Моталка;
- Платформа;
- Колесо, регулирующее необходимый вид строчки;
- Стойка рукавная;
- Обратный ход (ресивер);
- Игольный держатель;
- Пластина игольная;
- Лапка;
- Рукоятка поднятия и опускания лапки.
Эти элементы относятся к внешней части прибора, поэтому основной рабочий процесс кажется довольно легким. Сложная внутренняя система приводит в действие челнок при помощи множества дополнительных деталей. Челночное устройство позволяет создавать необыкновенные стежки разной формы, при этом манипуляции осуществляются быстро и качественно.
Отличие разных видов швейных машин
Широкий ассортимент современных моделей дает возможность выбора оптимального экземпляра, который удовлетворит индивидуальные потребности. Среди огромного модельного ряда есть различные виды швейных машин:
- с ручным приводом — применяются в домашних условиях, за счет механического управления они просты в эксплуатации. Ручной привод позволяет обрабатывать разные ткани, даже кожу и джинс. Такие устройства редко требуют ремонта, отличаются долговечность и надежностью;
- электромеханические — разработаны с электроприводом, управление приспособлением происходит вручную, приводится в работу при помощи переключателя. Такие агрегаты подразделяются на два типа: вертикальные и горизонтальные. Первые модели дешевые, ощущается довольно сильная вибрация, ширина строчки получается с ограничениями. Горизонтальные имеют преимущества — аппарат не резонирует, поэтому запутываний нити не происходит. Электрические приборы предназначаются для небольших работ, починки вещей;
- электронные — предусмотрены для профессиональных целей. Встроенный дисплей с микропроцессором передают команды на экран. Такие модели отлично справляются со всеми типами тканей, даже с вельветом и гипюром. Управление осуществляется за счет педали, рычага подъема. При самостоятельном машинном контроле шитье выходит высокого качества;
- оверлок — используется для обработки краев тканей с рыхлыми сплетениями. Основная часть моделей имеет ножи для удаления излишков припуска. Такая опция значительно экономит время в процессе шитья. Челнок в таких устройствах отсутствует, его опции выполняют специальные петлители. На дисплее указываются рекомендации по правильной установке нитей;
- вышивальные — такой аппарат необходим для создания шедевров. Компьютерная программа позволяет украшать ткань вышивкой, применяя разную технику. При загрузке файлов следует подобрать требуемый размер пялец, после чего заправить нити необходимых цветов. Сама процедура не требует человеческого контроля, она осуществляется самостоятельно;
- плоскошовные — это промышленное устройство с бытовыми модификациями. Самый подходящий вариант для обработки эластичных видов тканей. Стежок выполняется специальным образом, чтобы предотвратить растяжения материала. Такой экземпляр можно применять для трикотажа, полиэстера, стрейча.
Основные узлы и механизмы швейной машины
Важным узлом прибора принято считать электропривод, именно от этого элемента исходят скоростные показатели, производительность и мощность. Его нельзя перегружать постоянной работой на протяжении длительного времени. Электроприводный ремень по внешним признакам тонкий и слабый, но приводит в движение всю рабочую систему. Эту деталь необходимо оберегать от пошива грубых материалов (джинс, кожа и другие). На внутренней поверхности ремня располагаются зубчики, при его разрыве сложно подобрать достойную замену с определенным шагом.
Для мягкой работы аппарата нужно следить за ременным натяжением, со временем оно ослабляется, что влияет на снижение скорости. По этим причинам появляется повышенный уровень шума.
Полезно! При самостоятельной разборке прибора необходимо нажать пальцем на ремень в указанном стрелкой месте. Если он легко продавливается, то натяжение следует увеличить. Главное — не перестараться, иначе сильно натянутый ремешок может привести к тугому ходу. Такое действие неблагоприятно скажется на устройстве, и повысится износ втулок электродвигателя.
Основополагающие механизмы, которые необходимо знать при шитье:
- Рукоять длины стежка — задает требуемую длину;
- Фиксатор нажимной лапки — управляет подъемом и опусканием данной детали;
- Ручка натяжения нитки верхней части — осуществляется оптимальная настройка уровня натяжки;
- Стол (выдвигается), отдел для аксессуаров — такие комплектующие есть в отдельных моделях, в большинстве современных приборов они отсутствуют;
- Регулятор выбора разновидностей строчки — есть в разных экземплярах, в том числе с компьютерным управлением, где регулировка происходит при помощи дисплея;
- Реверс — позволяет делать стежки в обратном порядке;
- Маховик — приводит двигатель к манипуляциям и останавливает его;
- Выключатель свободного хода маховика — предусмотрен для переключения уровней наматывания шпульки и строчки;
- Рукоятка выбора вида стежка — позволяет подбирать нужный узор строчки;
- Разъем подключения педали к приспособлению;
- Педаль — контролирует скорость шитья и весь процесс;
- Регулятор ширины стежка — необходим для управления шаговой ширины.
Сама схема работы прибора довольно сложна, однако шить при помощи бытовой техники намного проще и быстрее.
Термины, используемые в названиях деталей
 Для работы с бытовым устройством в домашних условиях необходимо знать следующие термины:
Для работы с бытовым устройством в домашних условиях необходимо знать следующие термины:
- винт — производится с резьбой на основании, на головке располагается канавка под отверстие:
- болт — выполнен в виде детали с четырехгранной головкой, есть нарезанная резьба;
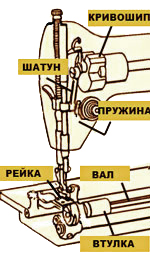
- вал — ось круглой формы, применяется для закрепления деталей, узлов, механизмов, передавая движение;
- втулка — цилиндрическая деталь с внутренним отверстием, фиксирует валы и оси;
- кривошип — крепится с краю вращающего элемента, в который внедряется деталь крепления шатуна;
- рейка — располагается под лапкой, имеет зубья, предусмотрена для продвижения материи вперед;
- нитепритягиватель — удлиненный провод, располагающийся на лицевой стороне агрегата, выдергивает нить при образовании стежка;
- игольная пластина — имеет отверстие для прохождения иглы к челночному ходу;
- игловодитель — удерживает иголку, осуществляет ее движение.
Устройство и принцип работы швейной машины
Работа челночного механизма
Шпулька, которая вставляется в отведенное для нее место, кооперируется с челноком. Основная деталь располагается по требуемому профилю. Движение происходит за счет шатунного соединения, которое задает должную траекторию. Рабочая процедура шатуна контролируется через панель. Вращение маховика приводит иглу в движение, передвигающуюся вверх, вниз. На подъеме проходит острый захват — это и есть носовой элемент челнока.
Шпулька
Деталь, расположенная за панелью под иголкой. Металлическая составляющая нужна для поставки ниток, наматываемых на нее перед началом процесса из основной катушки. Нить продевается в отводящееся для этого отверстие, после чего шпулька крепится к корпусу. Действие маховика производит вращение шпулечного элемента с наматыванием ниток на основную ось.
Устройство для протяжки материи
Данная процедура осуществляется таким образом:
- Начальные действия. По центру проходит основной вал, соединяющийся с осью маховика через шатун;
- Следующий шаг. Протяжный механизм начинает манипуляцию при синхронном вращении двух стержней, размещенных по бокам.
Деталь в виде ключа двигается вперед-назад по направлению хода материала. Кулачок, размещенный на второй оси, осуществляет функцию подъема-спуска. Во время движения всех механизмов ключ приводит в работу протяжные зубчики. Получая импульсивные признаки, зубья проделывают шаги при прокручивании на месте.
Натяжение ниток
Винт, размещенный над иглодержателем, создает должное натяжение верхней нити, чтобы шов был качественным. Возле держателя иглы есть ушко, перемещаемое в ходе шитья, оно противостоит ослаблению и провисанию нити.
Устройство намотки
Небольшое прижимное колесо с валом, имеющее риску, располагается вблизи маховика. Катушка устанавливается на вертикальной подставке, от нее протягивается нить над столом для наматывания на шпульку. Прижимное колесико осторожно вдавливается пальцем, чтобы обеспечить оптимальную работу. Завершающий этап — это вращение, поступающее от привода устройства.
Разработка кинематической схемы машины.
Кинематическая, гидравлическая, пневматическая схемы машины отражают соответствующие принципы взаимодействия и работы элементов машины. Эти схемы дают представление о том, как механическая энергия и движение передаются от источника до пункта её потребления и преобразования. Схемы являются принципиальными и позволяют установить, какие элементы и сколько их входят в устройство и в каких сочетаниях (кинематических парах) они объединяются.
Кинематические схемы вычерчивают в виде плоскостного (вид спереди и вид сбоку) и пространственного изображений. На кинематической схеме указывают наименование каждой кинематической группы элементов и основные характеристики и параметры кинематических элементов. Если кинематическая схема служит для динамического анализа, то на ней указывают необходимые размеры и характеристики элементов. Каждому кинематическому элементу на схеме присваивают порядковый номер, валы нумеруют римскими цифрами, а остальные элементы – арабскими.
На кинематических схемах указывают тип, мощность и частоту вращения электродвигателей, размер, исполнение и передаточное отношение редукторов, диаметр и ширину шкивов, типы и количество клиновых ремней, число зубьев и модули зубчатых передач, число заходов, шаг и направление нагрузки червяков и так далее.
В качестве примера на рис. 4.1 приведена кинематическая схема двухступенчатого редуктора [2].
 Рис.4.1. Кинематическая схема двухступенчатого редуктора.
Рис.4.1. Кинематическая схема двухступенчатого редуктора.
I (Т) — тихоходный вал; II — промежуточный вал;
III (Б) – быстроходный вал.
Конечной целью проектирования кинематической схемы машины является воспроизведение заданных движений рабочих органов. При проектировании необходимо учитывать динамические свойства механизмов, так как они определяют динамические нагрузки и характер движения звеньев кинематических цепей.
В основе расчёта кинематических цепей механизмов лежат две задачи динамики: по известному закону движения ведущего звена определить силы, приложенные к звеньям механизма и по известным силам определить закон движения по уравнениям Лагранжа.
Первая задача решается методом кинетостатики по уравнению Даламбера [1]. Так, например, для кинематической цепи, трансформирующей кратные круговые движения
 (4.1)
(4.1)
где МКР = МДВ — крутящий и движущий моменты; МС – момент сопротивления; J — момент инерции.
Вторая задача заключается в определении закона движения в соответствии с уравнением Лагранжа. Так, для кинематической цепи, реализующей линейно-круговые движения, уравнение Лагранжа имеет вид:
 (4.2)
(4.2)
где РДВ и Р С — сила движущая и сила сопротивления; Jпр и mпр— приведённые моменты инерции и масса; Z — количество элементов кинематической цепи.
Гидравлические и пневматические механизмы являются завершающими элементами в гидро – и пневмосистемах, в которых, помимо этих механизмов, имеются двигатели – насосы, регуляторы давления и расхода рабочего тела (масла, воздух); распределители и переключатели потоков рабочих тел, контрольно-измерительные приборы и так далее.
Перечень элементов кинематических, гидравлических и пневматических схем оформляют в виде таблицы. На полях схем допускается указывать данные, необходимые для монтажа, испытания и проверки системы: маркировка трубопроводов, рабочие среды, рабочие давления, температуру и др. На рис. 4.2 показана гидравлическая схема механизма для приведения в движение силового поршня, шток которого связан с рабочим органом машины.

Рис.4.2 Гидравлическая схема механизма.
1 – распределитель; 2,6 – электромагниты; 3 – гидроцилиндр; 4 – поршень; 5 – тормозное устройство; 7 – масляный бак; 8 – фильтр; 9 – клапан переливной; 10 – гидронасос.
Схема пневматического механизма имеет аналогичный вид, только насос заменяется источником сжатого воздуха (компрессором), а выброс отработавшего воздуха производится в атмосферу.
Совокупность кинематических, гидравлических и пневматических элементов и устройств на схемах изображают в виде условных графических символов (рис.4.1; 4.2)
4.2 Методы расчёта механизмов при проектировании БМП
Кинематический расчёт выполняют с целью выбора типа механизма и определения таких размеров его звеньев, при которых механизм обеспечивает перемещение исполнительного органа по заданному закону в соответствии с требованиями технологического процесса.
Кинематические параметры механизмов определяют динамичность технологических нагрузок, давлений в кинематических парах и напряжений в звеньях механизмов.
Методы определения размеров звеньев и расчёта элементов кинематических пар для механизмов различных типов различны.
Основными задачами силового расчёта механизмов являются задачи определения при заданных условиях давления в кинематических парах; определение величины и закона движущих сил, размеров звеньев, обеспечивающих оптимальные динамические условия работы механизма.
Для удовлетворения требований работоспособности механизма его звенья и кинематические пары должны быть правильно рассчитаны.
К тихоходным механизмам применят статический метод силового расчета, при котором учитываются все действующие на механизм нагрузки, кроме инерционных.
К быстроходным машинам применяют кинетостатический метод расчета с учётом всех действующих сил, включая силы инерции.
В результате кинетостатического расчета можно определить давление в кинематических парах, силы, воздействующие на звенья; а также определить движущую силу, обеспечивающую движение механизма, нагруженного внешними силами:
РДВ = РС + РИ (  m) (4.3)
m) (4.3)
где РС и РИ (  ,m) – силы сопротивления и инерции, приведённые к главному звену; и m — ускорение и масса звена приведения.
,m) – силы сопротивления и инерции, приведённые к главному звену; и m — ускорение и масса звена приведения.
При динамическом проектировании новых механизмов сначала задаются приближённым законом движения ведущих звеньев механизма и внешними силами, а затем после определения конструктивных размеров звеньев решают вопрос об истинном движении спроектированного механизма с учётом различных действующих на него сил. После этого в ранее выполненный расчёт вносят необходимые коррективы.
Дата добавления: 2015-09-25 ; просмотров: 3379 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ







