Механическая характеристика асинхронного двигателя
 Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2) . Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M) . Если учесть взаимосвязь s = (n1 — n) / n1 , то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2) . Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M) . Если учесть взаимосвязь s = (n1 — n) / n1 , то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
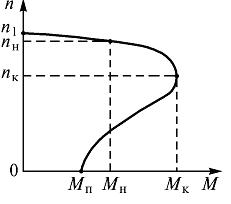
Рис. 1. Механическая характеристика асинхронного двигателя
 Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы, реакторы, конденсаторы. При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Пример расчета механической характеристики асинхронного двигателя
Трехфазный асинхронный двигатель с короткозамкнутым ротором питается от сети с напряжением = 380 В при = 50 Гц. Параметры двигателя: P н= 14 кВт, n н= 960 об/мин, cos φн = 0,85, ηн = 0,88, кратность максимального момента k м= 1,8.
Определить: номинальный ток в фазе обмотки статора, число пар полюсов, номинальное скольжение, номинальный момент на валу, критический момент, критическое скольжение и построить механическую характеристику двигателя.
Решение. Номинальная мощность, потребляемая из сети
P1 н = P н / ηн = 14 / 0,88 = 16 кВт.
Номинальный ток, потребляемый из сети

Число пар полюсов
p = 60 f / n1 = 60 х 50 / 1000 = 3,
где n1 = 1000 – синхронная частота вращения, ближайшая к номинальной частоте n н= 960 об/мин.
s н = (n1 — n н ) / n1 = (1000 — 960 ) / 1000 = 0,04
Номинальный момент на валу двигателя
Мк = k м х Мн = 1,8 х 139,3 = 250,7 Н•м.
Критическое скольжение находим подставив М = Мн, s = s н и Мк / Мн = k м.

Для построения механической характеристики двигателя с помощью n = (n1 — s) определим характерные точки: точка холостого хода s = 0 , n = 1000 об/мин, М = 0, точка номинального режима s н = 0,04, n н = 960 об/мин, Мн = 139,3 Н•м и точка критического режима s к = 0,132, n к = 868 об/мин, Мк =250,7 Н•м.
Для точки пускового режима s п = 1, n = 0 находим
По полученным данным строят механическую характеристику двигателя. Для более точного построения механической характеристики следует увеличить число расчетных точек и для заданных скольжений определить моменты и частоту вращения.
§79. Характеристики асинхронных двигателей
Характеристики асинхронных двигателей.
Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика.
Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора.
Как показывает кривая на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некотором скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
 Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В).
Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками.
Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
 Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рабочие характеристики.
Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия η и cosφ1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264).
 Рис. 264. Рабочие характеристики асинхронного двигателя
Рис. 264. Рабочие характеристики асинхронного двигателя
Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cosφ1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9.
Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз.
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы).
Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении.
Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз.
При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении.
Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты.
Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Рабочие характеристики асинхронного двигателя
§ 94. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Рабочие характеристики асинхронного двигателя представляют собой зависимости скольжения S, числа оборотов ротора n2, развиваемого момента М, потребляемого тока I1, расходуемой мощности Р1, коэффициента мощности соs j и к. п. д. η от полезной мощности Р2 на валу машины. Эти характеристики (рис. 115) снимаются три естественных условиях работы двигателя, т. е. двигатель нерегулируемый, частота f1 и напряжение U1 сети остаются постоянными, а изменяется только нагрузка на валу двигателя.

При увеличении нагрузки на валу двигателя скольжение возрастет, причем при больших нагрузках скольжение увеличивается несколько быстрее, чем при малых.
При холостом ходе двигателя п2=n1 или S=0.
При номинальной нагрузке скольжение обычно составляет S = 3-5%.
Скорость вращения ротора

Так как при увеличении нагрузки на валу двигателя скольжение возрастает, то число оборотов будет уменьшаться. Однако изменение скорости вращения при увеличении нагрузки от 0 до номинальной очень незначительно и не превышает 5%. Поэтому скоростная характеристика асинхронного двигателя является жесткой — она имеет очень малый наклон к горизонтальной оси.
Вращающий момент, развиваемый двигателем М, уравновешен тормозным моментом на валу М2 и моментом, идущим на преодоление механических потерь М0, т. е.

где Р2 — полезная мощность двигателя,
W2 — угловая скорость ротора.
При холостом ходе двигателя вращающий момент равен М0; с увеличением нагрузки на валу этот момент также увеличивается, причем за счет некоторого уменьшения скорости ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу.
Сила тока I1 потребляемого двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе соs j мал и ток имеет большую реактивную составляющую и очень малую активную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, а потому изменение нагрузки, т. е. изменение активной составляющей тока, вызывает незначительное изменение силы тока I1 (определяющейся в основном реактивной составляющей). При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение силы тока I1..
Потребляемая двигателем мощность Р1 при графическом изображении имеет вид почти прямой линии, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с увеличением нагрузки.
Изменение коэффициента мощности при изменении нагрузки на валу двигателя происходит следующим образом. При холостом ходе соsj мал (порядка 0,2), так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу соsj возрастает (достигая наибольшего значения 0,8—0,9) в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение соsj, так как вследствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая к. п. д. т) имеет такой же вид, как в любой машине или трансформаторе. При холостом ходе к. п. д. равен нулю. С увеличением нагрузки на валу двигателя к. п. д. резко увеличивается, а затем уменьшается. Наибольшего значения к. п. д. достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки.







