Схема замещения асинхронного двигателя
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2 ‘ (1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Z н .
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.

Более удобной при практических расчетах является Г-образная схема замещения.

В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.

Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Параметры схемы замещения рассматриваются подробнее в статье векторная диаграмма асинхронного двигателя
Схемы замещения асинхронного двигателя переменного тока

Из принципа действия асинхронного двигателя известно, что для того чтобы ротор асинхронного двигателя пришел во вращение, обмотка ротора должна быть замкнута накоротко .
Как видно из схемы, асинхронный двигатель при разомкнутом роторе представляет собой трехфазный трансформатор в режиме холостого хода, следовательно, для расчета параметров асинхронного двигателя можно использовать схему замещения трансформатора.
Схема замещения трансформатора.
Как видно из формулы скольжения, оно будет изменяться в двигательном режиме от 1 до 0. Отсюда следует, что при работе асинхронного двигателя ток ротора будет изменяться в зависимости от режима работы, то есть в зависимости от скольжения. Двигатель будет работать только в том случае, когда обмотка ротора замкнута. Чтобы учесть в схеме замещения влияние нагрузки на ток I2’, включаем в цепь ротора переменное сопротивление, равное по величине [(1-s)/s]·τ2’.
Схема замещения асинхронного двигателя:
Схема замещения асинхронного двигателя.
Т-образная схема замещения двигателя:
Т-образная схема замещения асинхронного двигателя.
Т-образная схема замещения асинхронного двигателя не совсем точно отражает физические процессы, происходящие в асинхронном двигателе, и поэтому не может быть использована для расчета его параметров.
Чтобы учесть влияние тока нагрузки на напряжение между точками 1 и 2 выносим намагничивающий контур на зажимы статора двигателя. Получаем схему замещения, у которой намагничивающий контур не зависит от нагрузки.
Г-образная схема замещения:
Г-образная схема замещения асинхронного двигателя.
I2’ – ток ротора, приведенный к статору.
Расчет параметров уточнённой Г–образной схемы замещения асинхронного двигателя. Расчет рабочих и пусковых характеристик
Страницы работы




Содержание работы
- Рассчитать параметры уточнённой Г – образной схемы замещения асинхронного двигателя. Начертить Г – образную схему замещения двигателя и разметить сопротивления.
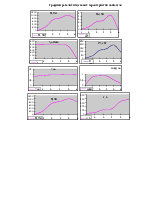
- Рассчитать рабочие и пусковые характеристики. Начертить графики рабочих и пусковых характеристик.
Параметры трёхфазного асинхронного двигателя.
Сопротивление Т – образной схемы замещения двигателя, Ом
Сопротивление двигателя при пуске (S=1), Ом
Определение параметров Г – образной схемы замещения
Определим полное сопротивление намагничивающего контура Г – образной схемы замещения:

Где: хо, x1, r2 | , x2 | , rо, r1 – сопротивления Т – образной схемы замещения асинхронного двигателя
 Ом
Ом
Определим коэффициент, учитывающий влияние сопротивления обмотки статора на магнитный поток при «идеальном холостом ходе» двигателя, для уточнённой Г – образной схемы замещения:
Определим активные сопротивления главной ветви схемы замещения:
 Ом
Ом
 Ом
Ом
 Ом
Ом
Определим индуктивные сопротивления главной ветви схемы замещения:
 Ом
Ом
 Ом
Ом
 Ом
Ом
Начертим Г – образную схему замещения асинхронного двигателя и обозначим сопротивления:
Рабочие и пусковые характеристики.
Определим ток намагничивающего контура:
Где: U1ф – номинальное фазное напряжение
 А
А
 о.е.
о.е.
 о.е.
о.е.
Определим потери мощности в обмотке статора при «идеальном» холостом ходе:

 кВт
кВт
Определим потери мощности в стали:

 кВт
кВт
Определим критическое скольжение:
 о.е.
о.е.
Рабочие и пусковые характеристики рассчитываем для значений скольжений S равных 0; 0,5Sн; Sн; 1,25Sн; Sкр; 1. Расчёт первой точки выполним для S = Sн
Определим рабочие и пусковые характеристики при изменении S от 0 до Sкр.
Находим полное сопротивление главной ветви схемы замещения:

При S = 0,5Sн = 0,5 · 0,023 = 0,013 о.е.
 Ом
Ом
При S = Sн = 0,023 о.е.
 Ом
Ом
При S = 1,25Sн = 1,25 · 0,023 = 0,0288 о.е.
 Ом
Ом
При S = Sкр = 0,139 о.е.
 Ом
Ом
Где: Rкп, Хкп – сопротивления двигателя при пуске с учётом вытеснения тока в стержнях обмотки ротора и насыщения зубцов сердечников статора и ротора машины, Ом.
 Ом
Ом
Определим ток нагрузки при изменении S от 0 до Sкр.:

 ;
;  ;
; 
При S = 0,5Sн = 0,5 · 0,023 = 0,013 о.е.
 А
А
 о.е.
о.е.
 о.е.
о.е.
При S = Sн = 0,023 о.е.
 А
А
 о.е.
о.е.
 о.е.
о.е.
При S = 1,25Sн = 1,25 · 0,023 = 0,0288 о.е.
 А
А
 о.е.
о.е.
 о.е.
о.е.
При S = Sкр = 0,139 о.е.
 А
А
 о.е.
о.е.
 о.
о.
 А
А
 о.е.
о.е.
 о.е.
о.е.
Определим активную составляющую тока статора:

Где: рмех – механические потери мощности
 А
А
При S = 0,5Sн = 0,5 · 0,023 = 0,013 о.е.
 А
А
При S = Sн = 0,023 о.е.
 А
А
При S = 1,25Sн = 1,25 · 0,023 = 0,0288 о.е.
 А
А
При S = Sкр = 0,139 о.е.
 А
А
 А
А
Определим реактивную составляющую тока статора:

 А
А
При S = 0,5Sн = 0,5 · 0,023 = 0,013 о.е.
 А
А
При S = Sн = 0,023 о.е.
 А
А
При S = 1,25Sн = 1,25 · 0,023 = 0,0288 о.е.
 А
А
При S = Sкр = 0,139 о.е.
 А
А
 А
А
Определим полный ток статора:
 А
А
При S = 0,5Sн = 0,5 · 0,023 = 0,013 о.е.
 А
А
При S = Sн = 0,023 о.е.
 А
А
При S = 1,25Sн = 1,25 · 0,023 = 0,0288 о.е.
 А
А
При S = Sкр = 0,139 о.е.
 А
А
 А
А
Определяем потребляемую мощность из сети:

 кВт
кВт
При S = 0,5Sн = 0,5 · 0,023 = 0,013 о.е.
 кВт
кВт
При S = Sн = 0,023 о.е.
 кВт
кВт
При S = 1,25Sн = 1,25 · 0,023 = 0,0288 о.е.
 кВт
кВт
При S = Sкр = 0,139 о.е.
 кВт
кВт
 кВт
кВт
Определим потери мощности в обмотках машины, обусловленные током нагрузки:


При S = 0,5Sн = 0,5 · 0,023 = 0,013 о.е.
 кВт
кВт
При S = Sн = 0,023 о.е.
 кВт
кВт
При S = 1,25Sн = 1,25 · 0,023 = 0,0288 о.е.
 кВт
кВт
При S = Sкр = 0,139 о.е.
 кВт
кВт
 кВт
кВт
Находим добавочные потери мощности:
Где: Р1н – потребляемая мощность при номинальном скольжении Sн; I1н – ток статора при номинальном скольжении Sн.
 кВт
кВт







