Пуск, реверсирование и торможение двигателей постоянного тока
 Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(M н) и n = f2 (I я ) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
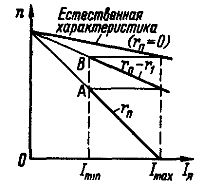
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
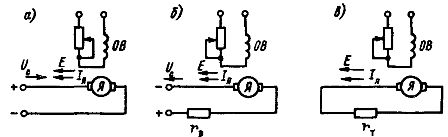
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.

Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.
Большая Энциклопедия Нефти и Газа
Направление — вращение — двигатель — постоянный ток
Направления вращения двигателей постоянного тока регулируются изменением направления тока либо только в якоре, либо только в обмотке возбуждения. Одновременное изменение направления тока в якоре и обмотке возбуждения не приводит к реверсированию двигателя. [1]
Чтобы изменить направление вращения двигателя постоянного тока , следует изменить направление тока в обмотке якоря или в обмотке индуктора. [2]
Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в обмотке возбуждения. [3]
Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в. [4]
Для изменения направления вращения двигателя постоянного тока необходимо изменить направление силы, действующей на проводники якоря в магнитном поле. [5]
Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в обмотке возбуждения. [6]
Для остановки двигателя снимают нагрузку, затем в цепи параллельной обмотки возбуждения выводят реостат, что приводит к увеличению тока возбуждения, возрастанию магнитного потока и снижению скорости вращения; затем вводят пусковой реостат и, наконец, при помощи разъединителя или автомата отключают двигатель от сети. Чтобы изменить направление вращения двигателя постоянного тока , нужно изменить направление тока либо только в обмотке якоря, либо только в обмотке возбуждения. [7]
Для изменения направления вращения двигателя постоянного тока , имеющего смешанное возбуждение, необходимо изменить направление тока в обмотках якоря и дополнительных полюсов или изменить направление тока как в параллельной, так и в последовательной обмотках возбуждения. [9]
Серводвигатели могут иметь разное исполнение, но, как правило, все они обладают реверсивными свойствами. Известно, что изменение направления вращения двигателя постоянного тока осуществляется либо за счет изменения направления тока, проходящего через якорь, либо за счет изменения направления потока возбуждения. В серводвигателях сериесного типа ( рис. 6.12) для осуществления реверсирования предусматривают две обмотки возбуждения ОВ1 и 052 и в зависимости от того, какая из них задействована, двигатель вращается в ту или другую сторону. Обычно такой двигатель управляется релейным элементом в виде, например, перекидного контакта / С. [11]
Известно, что для изменения направления вращения двигателя постоянного тока надо изменить направление тока в якоре или в обмотке возбуждения. В данном случае принято изменять направление тока в якоре, что значительно легче ввиду меньшей индуктивности этой обмотки, и поэтому при переключении этой цепи не возникает больших перенапряжений. [12]
Реверсивными называют преобразователи, позволяющие изменять полярность постоянного напряжения на нагрузке. Реверсивные преобразователи используются главным образом в электроприводе для изменения направления вращения двигателей постоянного тока . [14]
Реверсивными называются преобразователи, позволяющие изменять полярность постоянного напряжения и тока в нагрузке. Реверсивные преобразователи используются, главным образом, в электроприводе для изменения направления вращения двигателей постоянного тока . [15]
Изменение направления вращения двигателя постоянного тока последовательного возбуждения
Стандартная схема включения двигателя постоянного тока последовательного возбуждения приведена на рис. 3.21.

Зплп гателя последовательного возбуждения

Если изменить полярность напряжения на электродвигателе, как показано на рис 3.21 в скобках, то изменения направления вращения (реверса) двигателя не произойдет. Электромагнитный момент двигателя постоянного тока определяется в соответствии с выражением (3.4)
При изменении полярности напряжения U меняются направления как тока якоря двигателя I, так и тока обмотки возбуждения, последнее приводит к изменению направления потока Ф, созданного обмоткой возбуждения LM. Знак электромагнитного момента остается прежним. Это свойство двигателя последовательного возбуждения позволяет включать его в цепь однофазного переменного тока, направление вращения двигателя при этом будет всегда одного знака. Для изменения направления вращения двигателя последовательного возбуждения необходимо изменить знак его электромагнитного момента. Это возможно, если изменить направление тока только через обмотку якоря М или только обмотку возбуждения LM двигателя:
М = к ■ Ф • (-/) = к • (-Ф) • I.
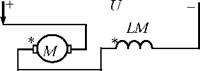
На практике во избежание перемагничивания двигателя обычно меняют направление тока, протекающего по обмотке якоря двигателя. Схема включения двигателя при реверсе приведена на рис. 3.22. Звездочками * на схемах рис. 3.21 и рис. 3.22 обозначены начала обмоток якоря и возбуждения.
Рис. 3.22. Схема включения двигателя последовательного возбуждения при реверсе
Двигатель последовательного возбуждения успешно применяется в электроинструментах, включаемых в сеть однофазного переменного тока: электродрелях, электрорубанках, электропилах и др.







