Качение ведущего колеса автомобиля




2.1. Качение автомобильного колеса
Основным преимуществом колеса как механизма является возможность экономии работы при перемещении груза за счет замены трения скольжения, возникающего на границе двух взаимно перемещаемых тел, значительно меньшим по величине трением качения. Действующие на колесо автомобиля силы и моменты вызывают со стороны дороги реактивные силы, которые в общем случае расположены в трех взаимно перпендикулярных направлениях и приложены к колесу в месте его контакта с основанием дороги. Эти реактивные силы получили название вертикальной G, тангенциальной X и боковой Y. Неподвижное колесо подвержено действию одной вертикальной силы G, приложенной к оси колеса (рис. 2.1). В этом случае действующая на ось колеса весовая нагрузка вызовет со стороны основания равную по величине реактивную силу Z. Вертикальная сила G, приложенная к оси колеса, и ее реакция Z со стороны дороги расположены в одной вертикальной плоскости, проходящей через ось колеса. Если приложить толкающую силу Р к автомобилю, он начнет перемещаться. Колесо начинает совершать вращательное движение относительно своего центра и поступательное перемещение относительно исходной точки дорожного основания. При этом сопротивления, возникающие при качении колеса, будут складываться из сопротивлений, препятствующих поступательному его перемещению.
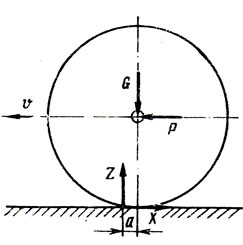
Рис. 2.2. Силы, действующие на ведомое колесо
Качение колеса по опорной поверхности приводит к нарушению симметрии области контакта колеса и основания относительно вертикали, проходящей через центр колеса, и вызывает смещение реакции Z относительно этой вертикали вперед по ходу его движения на определенную величину а, называемую коэффициентом трения и измеряемую в единицах длины (рис. 2.2). Вертикальная реакция Z как и при неподвижном колесе, численно будет равна нагрузке.
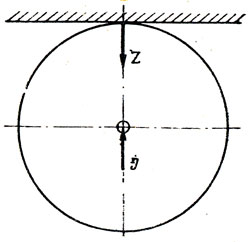
Рис. 2.1. Действие сил на неподвижное жесткое колесо
В случае ведомого колеса толкающая сила Р от автомобиля через подшипник передается на ось колеса и вызывает со стороны основания тангенциальную реакцию X, которая будет приложена к поверхности колеса в зоне его контакта и будет иметь противоположное толкающей силе Р направление.
Описанный случай движения колеса характерен тем, что толкающая сила, действующая на его ось, обусловлена и всегда равна тем сопротивлениям, которые возникают при качении рассматриваемого колеса.
Работа ведущего колеса отличается тем, что к колесу прикладывается не толкающая сила, а крутящий момент (рис. 2.3, а). Этот момент Мк должен уравновесить суммарное сопротивление Рсопр всех противодействующих движению сил (ветра, уклона дороги, трения, инерционных). В результате в контакте колеса с дорогой возникает реакция Rх = Pсопр, направленная в сторону движения.
Кроме функции ведомого и ведущего, колесо может выполнять роль тормозящего. Работу тормозящего колеса можно сравнить с работой ведущего. Разница состоит в том, что крутящий момент, а следовательно, и тангенциальная реакция дороги имеют противоположное направление и определяются интенсивностью торможения (рис. 2.3,б). Коэффициент сцепления между колесом и основанием в большинстве случаев значительно меньше единицы и, следовательно, тангенциальная сила, как правило, значительно меньше вертикальной.
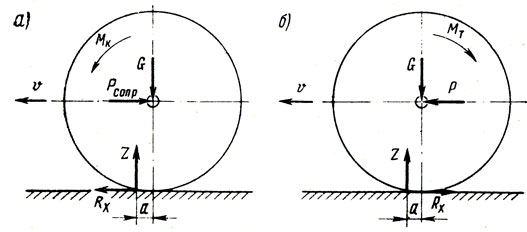
Рис. 2.3. Силы, действующие на ведущее (а) и тормозящее (б) колесо
Толкающая сила, приложенная к оси ведомого колеса, и тангенциальная реакция, действующая на колесо со стороны основания, создают крутящий момент, который при установившемся движении равен моменту тангенциальной (или вертикальной) реакции относительно центра колеса. Для ведущего колеса крутящий момент складывается из суммы этих моментов, а для тормозящего колеса равен их разности.
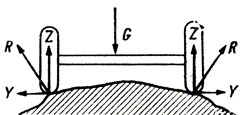
Рис. 2.4. Действие сил на колеса во время движения по неровному основанию
Кроме перечисленных силовых факторов, колесо часто подвергается воздействию боковых сил и моментов, расположенных в плоскости, перпендикулярной плоскости вращения колеса.
На плоском и ровном основании боковые силы являются следствием действия на шасси автомобиля опрокидывающих поперечных сил, например центробежной силы на повороте или составляющей веса, обусловленной наклоном дороги.
На выпуклом или вогнутом основании, а также при движении по дороге, имеющей неровности, колеса также могут испытывать действие боковых сил (рис. 2.4), которые при условии их равенства на левых и правых колесах по величине и противоположности по направлению будут гаситься на оси, не передаваясь на сам автомобиль. Действие на колесо боковой силы, так же как и тангенциальной, ограничено сцеплением колеса с дорогой. При движении автомобиля по выпуклому или вогнутому основанию или особенно по дороге с неровностями боковые силы могут достигать весьма значительной величины.
Таким образом, весь комплекс внешних нагрузок, действующих на колесо со стороны дороги, может быть представлен тремя взаимно перпендикулярными силовыми факторами:
вертикальной реакцией Z, величина которой обусловливается суммарным весом перевозимого груза и автомобиля. Эта нагрузка всегда действует на колесо независимо от того, движется оно или нет, работает в качестве ведомого, ведущего или тормозящего. Величина же этой нагрузки при движении может изменяться в зависимости от ускорения (замедления), продольного и поперечного профиля дороги, ее извилистости, неровностей дорожного полотна и скорости движения;
тангенциальной реакцией X, расположенной в плоскости колеса и являющейся следствием приложения к нему внешнего момента (крутящего или тормозного), толкающей силы, аэродинамического сопротивления, силы трения качения. Величина этой реакции достигает наибольшего значения обычно при торможении, однако, как правило, ограничена коэффициентом сцепления колеса с основанием дороги, который в большинстве случаев меньше единицы, а следовательно, даже наибольшее значение этой нагрузки, как правило, меньше вертикальной реакции;
боковой реакцией Y, которая расположена в плоскости, перпендикулярной плоскости колеса. Подобно тангенциальной эта нагрузка также ограничена силой сцепления колеса с дорогой и, следовательно, ее максимальное значение не может быть больше вертикальной силы, за исключением случаев движения по неровной дороге, глубокой колее. В этих условиях боковая сила может значительно превосходить силу сцепления колеса с дорогой.
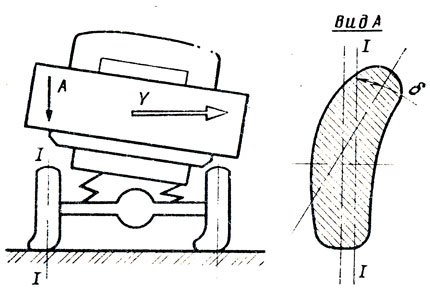
Рис. 2.5. Деформация шин при повороте автомобиля и соответствующее искажение пятна контакта шины с дорогой из-за увода колеса (вид А)
Особого интереса заслуживают качение наклоненного колеса и боковой увод шины. При движении автомобиля на повороте профиль эластичной шины деформируется в боковом направлении под действием центробежной силы, направленной перпендикулярно плоскости колеса (рис. 2.5). Вследствие боковой деформации шины колесо катится не в плоскости I-I, а под углом увода δ.
Способность шины к боковой деформации оказывает большое влияние на эксплуатационные свойства автомобиля, особенно на его устойчивость и управляемость. Поэтому параметры, определяющие увод колеса, являются важной характеристикой шины.
Увод колеса оценивается углом δ, который принято называть углом бокового увода. Приложенные к колесу силы вызывают боковую деформацию шины за счет изгиба протектора в боковом направлении. При качении колеса с уводом шина имеет сложную деформацию, которая несимметрична относительно ее вертикальной плоскости симметрии. При небольшой боковой силе и незначительных углах увода изменения боковой деформации в контакте подчиняются линейному закону.
Для каждой шины имеются определенная максимальная боковая сила и соответствующий ей определенный максимальный угол увода, при котором еще отсутствует большое проскальзывание элементов протектора в боковом направлении. Максимальный такой угол для большинства отечественных шин легковых автомобилей равен 3-5°.
Одним из часто встречающихся случаев качения колеса является случай движения его с наклоном к дороге. Действительно, на автомобиле колеса могут иметь наклон к дороге из-за их установки с разной нормальной деформацией шин, применения независимой подвески, наклона дороги и других факторов.
Наклон колеса к дороге оказывает существенное влияние на работу шины и траектории движения. При качении наклонного колеса в направлении плоскости вращения, со стороны дороги на него действуют так же, как и при уводе, боковая сила и момент. Последний стремится повернуть колесо в сторону его наклона.
Наклон колеса к дороге приводит к появлению боковой деформации шины, в результате которой центр давления контакта смещается в сторону наклона колеса. Возникают повышенные напряжения в плечевой зоне протектора шины. У наклонного колеса протектор шины изнашивается быстро и неравномерно, особенно в плечевой зоне со стороны наклона колеса. Таким образом, наклон колеса к дороге значительно уменьшает срок службы шины.
Наклон колеса к дороге изменяет угол увода. При движении автомобиля на повороте, когда при поперечном наклоне кузова колесо наклоняется в сторону боковой силы, увод колеса увеличивается. Такое явление наблюдается у передних управляемых колес легковых автомобилей, имеющих независимую подвеску. Уменьшение склонности шин к боковому уводу и уменьшение наклона колеса к дороге положительно сказываются на продлении срока службы шин. Уменьшения бокового увода можно достигнуть за счет увеличения ширины и понижения высоты профиля шины, увеличения угла наклона нитей корда по короне покрышки, повышения давления воздуха в шине, расширения обода.
Уменьшить наклон колес к дороге можно благодаря ряду конструктивных мер по установке колес, а также правильному подбору схемы и подвески. Целесообразно, чтобы подвеска при движении автомобиля на повороте создавала некоторый наклон колес к центру радиуса поворота автомобиля.
Влияние наклона колес в пределах практически встречающихся его величин на угол увода современных шин незначительно.
Устройство автомобилей
Основы динамики автомобиля
Скоростная характеристика двигателя
Скоростная характеристика двигателя определяется зависимостями эффективной мощности Ne и крутящего момента Mк от частоты вращения n коленчатого вала.
Ведущие колеса автомобиля приводят его в движение в результате возникновения силы тяги, которая возникает при приложении крутящего момента к полуосям ведущих колес со стороны трансмиссии:
где Pт – сила тяги, Н;
Mт – крутящий (тяговый) момент на ведущем колесе, Нм;
r – радиус колеса, м.
Крутящий момент на ведущих колесах зависит от величины момента, развиваемого двигателем на коленчатом валу, передаточного числа iтр трансмиссии и ее КПД – ηтр :
Сила тяги Pт на ведущих колесах может быть определена не только по формуле (1), но и с учетом скорости vi движения автомобиля на i -й передаче и развиваемой двигателем эффективной мощности Nе :
Скорость vi движения автомобиля на i -й передаче пропорциональна частоте n вращения коленчатого вала, радиусу r ведущего колеса и обратно пропорциональна передаточному числу iтр i трансмиссии на i -й передаче:
Таким образом, частота вращения n коленчатого вала является определяющим параметром для показателей эффективной мощности Nе , крутящего момента Mк и силы тяги на ведущих колесах Pт .

На рисунке 1 приведена внешняя скоростная характеристика двигателя при полностью открытой дроссельной заслонке, которая определяет предельные возможности двигателя при значениях частоты вращения коленчатого вала от nmin до nmax .
Анализ графика показывает, что максимальная эффективная мощность и максимальный крутящий момент, развиваемый двигателем, доступен в узком интервале частот вращения коленчатого вала. При небольшой частоте вращения коленчатого вала величина этих динамических показателей недостаточна для появления на ведущих колесах требуемой для движения автомобиля силы тяги, а при превышении частотой вращения коленвала некоторого максимального порога двигатель начинает терять мощность и тяговые показатели, или, как говорят механики, начинает работать «вразнос».
По этой причине эффективная эксплуатация двигателя внутреннего сгорания возможна лишь в некотором узком диапазоне частот вращения коленчатого вала.
Скоростная характеристика двигателя во многом зависит от типа двигателя: чем круче кривая эффективной мощности Nе , тем большей приемистостью обладает двигатель.
Тяговая характеристика автомобиля
Тягово-скоростные свойства автомобиля удобно оценивать с помощью тяговой характеристики, т. е. зависимостью силы тяги на ведущих колесах от скорости движения на различных передачах (рис. 2).
Используя скоростную характеристику и задавая частоты вращения коленчатого вала от nmin до nmax при соответствующих значениях эффективной мощности или крутящего момента для каждой передачи по формуле (4) находят значения скорости v , а по формуле (3) находят значение тяговой силы Pт .
Число кривых на тяговой характеристике (рис. 2) соответствует числу ступеней в коробке передач.
Тяговая характеристика позволяет быстро определить максимальное значение силы тяги на ведущих колесах, которая может быть обеспечена при данной скорости движения автомобиля, поскольку она рассчитывается по наибольшей для данной частоты вращения коленчатого вала мощности двигателя. Меньшее значение силы тяги получается при недоиспользовании мощности двигателя, т. е. при неполной подаче топлива. Следовательно, с помощью тяговой характеристики можно оценить предельные тяговые возможности автомобиля в фактическом интервале скоростей его движения.
Силы и моменты, действующие на ведущие колеса
На ведущие колеса автомобиля действуют силы со стороны автомобиля (т. е. со стороны двигателя посредством агрегатов трансмиссии), а также силы со стороны дороги. Обозначим силы, действующие со стороны автомобиля, буквой Р , а со стороны дороги – буквой R (рис. 3).
Реактивные силы, действующие на колеса
Тяговый момент Мт на ведущих колесах стремится сдвинуть назад верхний слой дорожного покрытия, в результате чего со стороны дороги на ведущее колесо в зоне контакта действует противоположно направленная сила Rx – горизонтально направленная касательная реакция дороги.

Так как на автомобиле используются эластичные пневматические шины, то неизбежна частичная потеря момента Мт , поэтому продольную (горизонтальную) реакцию со стороны дороги, обеспечивающую качение колеса, можно записать как разность между силой тяги и потерями в шине:
где Рш – сила, учитывающая потери энергии в шинах ведущих колес.
Таким образом, касательная реакция дороги создает силу тяги.
Автомобиль своим весом G действует на каждое колесо, передавая усилие на дорогу, и, соответственно, вызывая нормальную реакцию дороги Rz . Следует учитывать, что при наличии на колесе крутящего момента нормальная реакция Rz прикладывается не к оси симметрии опорной площадки колеса, а на некотором расстоянии αш от нее, поскольку имеет место смещение центра давления из-за эластичности шины.
Эпюра элементарных нормальных реакций дороги, показанная на рисунке 4, объясняет причину смещения точки приложения реакции Rz . Это происходит из-за того, что нормальные реакции на переднем и заднем участках опорной площадки колеса различны по величине, так как силы, возникающие в упругом материале шины при приложении и снятии нагрузки неодинаковы.
Это объясняется действием сил внутреннего трения между взаимно перемещающимися частицами материала шины. При приложении нагрузки эти силы и силы упругости направлены в одну и ту же сторону, а при снятии – в противоположные стороны.
Боковая сила Рy значительно увеличивается при криволинейном движении автомобиля или при движении по косогору. Боковая реакция Ry со стороны дороги удерживает колеса автомобиля от бокового скольжения (заноса) при движении автомобиля поперек косогора или при выполнении маневра.
Сила тяги на ведущих колесах
Сила тяги Рт на ведущих колесах может быть определена, как отношение крутящего (тягового) момента Mт , подводимого к колесам, к их радиусу r :
При этом не учитываются затраты энергии на деформацию дорожного покрытия, трение внутри шины и силы инерции, обусловленные ускорением вращающихся масс колес и деталей трансмиссии в случае неравномерного движения.

Следует учитывать, что радиус колеса вследствие эластичности шины является переменной величиной.
Различают следующие радиусы автомобильных колес:
- статический радиус колеса rст – расстояние от поверхности дороги до оси неподвижного колеса, воспринимающего вертикальную нагрузку, обусловленную силой тяжести, действующей на автомобиль (т. е. его весом G ). Значения статического радиуса приводятся заводом-изготовителем шины в технических характеристиках;
- динамический радиус колеса rд – расстояние от поверхности дороги до оси катящегося колеса. Динамический радиус колеса во время движения может превышать его статический радиус, поскольку в результате нагрева шины давление внутри нее увеличивается.
Кроме того, под действием центробежных сил с возрастанием скорости автомобиля шина растягивается в радиальном направлении, вследствие чего динамический радиус увеличивается. Динамический радиус, также, зависит от величины вертикальной нагрузки Pz . - радиус качения колеса rк – радиус условного недеформирующегося катящегося без скольжения колеса, которое имеет с данным эластичным колесом одинаковую угловую и линейную скорости.
Радиус качения колеса определяется по формуле:
где S – путь, пройденный колесом; nк – число оборотов колеса на пути S .
Если проскальзывание колеса относительно дороги отсутствует, что характерно для ведомого колеса, то радиусы rд и rк почти равны между собой. В случае полного буксования колеса его пройденный путь будет равен нулю, и тогда (согласно приведенной выше формуле) его радиус качения тоже будет равен нулю.
В случае движения колеса юзом (скольжение без вращения) число оборотов будет равно нулю, и, соответственно, радиус качения rк будет стремиться к бесконечности.
Различают еще и свободный радиус колеса rсв , который является половиной диаметра ненагруженного колеса при отсутствии его контакта с опорной поверхностью.
На дорогах с сухим покрытием скольжение ведущих колес и изменение радиуса незначительны. Поэтому радиусы статический rст , динамический rд и качения rк при расчетах считаются одинаковыми и обозначаются буквой r .







