Конструкции асинхронных исполнительных двигателей
Асинхронные исполнительные двигатели выпускаются следующих видов:
1) с полым немагнитным ротором; 2) с полым ферромагнитным ротором; 3) с короткозамкнутым ротором типа «беличья клетка».
Асинхронные исполнительные двигатели с полым немагнитным ротором. Сегодня это, пожалуй, самые распространенные асинхронные исполнительные двигатели. Они применяются в различных системах автоматического управления и выпускаются целым рядом заводов. Их мощности – от десятых долей ватта до сотен ватт. Они рассчитываются на промышленную частоту (50 Гц) и на повышенные частоты (200, 400, 500 Гц). Угловые скорости вращения колеблются от 1500 до 30000 об/мин.
Одна из конструктивных схем двигателя с полым немагнитным ротором представлена на рис. 1.17. Двигатель состоит из внешнего статора 1 с обмотками возбуждения и управления; внутреннего статора–сердечника 2 без обмоток, служащего лишь для уменьшения магнитного сопротивления на пути главного потока; полого немагнитного ротора 3, выполненного из материала с высоким удельным сопротивлением (чаще всего из сплавов алюминия). Толщина стенок ротора составляет 0,1–1 мм. Весьма небольшая масса ротора делает его малоинерционным, что придает двигателю очень ценные свойства. Между стенками ротора и обоими статорами выполняются воздушные зазоры, величина
которых обычно не превосходит 0,15–0,25 мм. Однако, эти зазоры вместе c немагнитным ротором создают большие немагнитные промежутки между внешним и внутренним статорами, что приводит к большим намагничивающим токам, достигающим 90 % от номинального значения.

Рис. 1.17. Асинхронный исполнительный двигатель с полым немагнитным ротором
Двигатели мощностью 0,1–5 Вт изготавливают несколько иначе. Поскольку такие двигатели имеют малые внутренние диаметры, то для облегчения укладки обмоток их размещают в пазах внутреннего статора, а внешний делают без обмоток. Правда, это приводит к некоторому увеличению диаметра ротора, а следовательно и его момента инерции. Для устранения последнего недостатка иногда используют третью конструкцию: одну из обмоток размещают на внутреннем, а другую – на внешнем статоре.
Достоинства двигателей с полым немагнитным ротором.
1) Малый момент инерции, что в совокупности со значительным пусковым моментом обеспечивает высокое быстродействие. Электромеханические постоянные времени большинства их них лежат в пределах: 0,01–0,1 с. при
f = 50 Гц и 0,02–0,15 с. при f = 400 Гц.
2) Сравнительно хорошая линейность механических и регулировочных характеристик, чему в известной мере способствуют весьма незначительные индуктивные сопротивления немагнитного ротора [xр = (0,05–0,1)rр].
3) Высокая чувствительность – малое напряжение трогания, что объясняется малым моментом инерции и отсутствием односторонних сил магнитного притяжения, поскольку ротор выполнен из немагнитного материала.
Недостатки двигателей с полым немагнитным ротором.
1) Низкие энергетические показатели, что объясняется большими намагничивающими токами, приводящими к значительным потерям в обмотках.
2) Большие габариты и масса, обусловленные первым недостатком.
Асинхронные исполнительные двигатели с полым немагнитным ротором выпускаются сериями АДП, ДИД, ЭМ. Как правило, первая серия предназначена для устройств наземной автоматики, вторая – для авиационной и космической техники, а третья – для средств вычислительной техники.
Асинхронные исполнительные двигатели с полым ферромагнитным ротором. В отличии от двигателей первого типа ротор этого двигателя выполняется из магнитного материала с толщиной стенок 0,3–3 мм, поэтому здесь отсутствует внутренний статор. Воздушный зазор небольшой (0,2–0,3 мм). Однако намагничивающий ток (  ) этого двигателя практически мало отличается от двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
) этого двигателя практически мало отличается от двигателя с полым немагнитным ротором, т.к.проводимость ротора и здесь невысокая вследствие его малой толщины.
Двигатель имеет большой момент инерции и небольшой пусковой момент, что значительно ухудшает его быстродействие. Приемы, связанные с омеднением ротора с целью увеличения пускового момента, оказались малоэффективными. Существенным недостатком являются большие силы одностороннего магнитного притяжения, приводящие порой к залипанию ротора и отказам в работе. В целом эти двигатели значительно уступают двигателям с полым немагнитным ротором, поэтому они не получили широкого распространения.
Асинхронные двигатели с короткозамкнутым ротором выпускаются обычного исполнения и специальной, так называемой «сквозной» конструкции.
Первые отличаются от силовых машин только повышенным активным сопротивлением ротора и используются в тех установках, где требования высокого быстродействия не играют существенной роли. Вторые имеют оригинальную конструкцию, суть которой состоит в том, что диаметр расточки статора  равен наружному диаметру подшипника
равен наружному диаметру подшипника  (рис. 1.18) Такая конструкция позволяет проводить окончательную обработку (шлифовку) внутренней поверхности статора и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на статоре. Обычно лобовые части покрывают специальным компаундом для предохранения их от металлической стружки.
(рис. 1.18) Такая конструкция позволяет проводить окончательную обработку (шлифовку) внутренней поверхности статора и отверстий под подшипники в подшипниковых щитах за одну установку двигателя на станке. Конечно, перед этим подшипниковые щиты должны быть закреплены на статоре. Обычно лобовые части покрывают специальным компаундом для предохранения их от металлической стружки.

Рис. 1.18. Асинхронный исполнительный двигатель «сквозной» конструкции
«Сквозная» конструкция позволяет получать воздушные зазоры в 0,03–0,05 мм, что на уменьшения момента инерции их выполняют с малым диаметром и увеличенной длиной ротора. Обычно  .
.
Малые воздушные зазоры резко уменьшают намагничивающий ток, увеличивают КПД,  , вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
, вращающий момент двигателя. Однако сравнительно большой момент инерции (по отношению к двигателям с полым немагнитным ротором) приводит к увеличению электромеханической постоянной времени.
Поворотные трансформаторы. Общие положения
Поворотными (вращающимися) трансформаторами называются небольшие индукционные машины, преобразующие угол поворота ротора в напряжение, пропорциональное либо самому углу, либо его функции.
Различают: 1) синусно–косинусные поворотные трансформаторы (СКПТ), которые выдают два напряжения, изменяющиеся по гармоническому закону  и
и 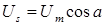 ; 2)линейные поворотные трансформаторы (ЛПТ), выходное напряжение которых изменяется по закону
; 2)линейные поворотные трансформаторы (ЛПТ), выходное напряжение которых изменяется по закону  .
.
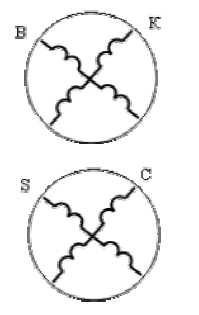
Рис.6.1. Условная схема поворотного трансформатора
Поворотные трансформаторы (ПТ) состоят из статора и ротора, в пазах которых уложено по две взаимно перпендикулярных обмотки (рис.6.1). Одну из статорных обмоток называют обмоткой возбуждения – В, другую – компенсационной– К. Обмотки ротора носят названия синусной – S и косинусной– C. Параметры статорных обмоток полностью идентичны друг другу. Тоже самое справедливо и для роторных обмоток.
ПТ относятся к электрическим машинам высокой точности. Достаточно сказать, что изменение взаимной индуктивности между статором и ротором должно отличаться от гармонического закона не более чем на 0,05%.
Потребляемая поворотными трансформаторами мощность составляет несколько вольт–ампер при напряжении до 115 В и частоте 50, 400 и 2500 Гц.
УСТРОЙСТВО И ОСНОВНЫЕ КОНСТРУКТИВНЫЕ ТИПЫ АСИНХРОННЫХ ИСПОЛНИТЕЛЬНЫХ ДВИГАТЕЛЕЙ




![]()
![]()
Асинхронные исполнительные двигатели, применяемые в устройствах автоматики, служат для преобразования подводимого к ним электрического сигнала в механическое перемещение вала. При заданном тормозном моменте частота вращения двигателя должна строго соответствовать подводимому напряжению и изменяться в широком диапазоне — от нуля до максимума при изменении его значения или фазы. Таким образом, исполнительные двигатели являются управляемыми.
Способы управления исполнительными двигателями. Исполнительными двигателями переменного тока служат главным образом двухфазные асинхронные двигатели с короткозамкнутым ротором (рис. 5.1, а). Одна из обмоток статора В, называемая обмоткой возбуждения, подключается к сети переменного тока с постоянным действующим значением напряжения Uв . Ко второй обмотке статора У,называемой обмоткой управления, подводится напряжение управления Uy от управляющего устройства УУ.
Различают три основных способа управления частотой вращения исполнительного двигателя: амплитудное, фазовое и амплитудно-фазовое.
При амплитудном управлении изменяется только амплитуда напряжения управления или пропорциональное ей действующее значение Uy этого напряжения. Векторы напряжений управления и возбуждения при всех значениях напряжения Uy образуют угол 90° (рис. 5.1,б).
Напряжение управления обычно выражают в относительных единицах, как отношение Uy к напряжению возбуждения Uв , приведенному к числу витков обмотки управления. Это отношение называют эффективным коэффициентом сигнала
Фазовое управление характерно тем, что напряжение управления Uy остается неизменным по величине и равным U’в , а регулирование частоты вращения достигается путем изменения угла сдвига фаз β между векторами напряжений возбуждения и управления (рис. 5.1, в). За коэффициент сигнала при фазовом управлении принимается синус угла сдвига фаз β между векторами напряжений Uy и Uв , т. е. α = sin β.
 | Рис. 5.1. Принципиальная схема асинхронного испол нительного двигателя (а) и векторные диаграммы напряжения при амплитудном (б) и фазовом (в) уп равлениях |
При амплитудно-фазовом управлении изменяется как амплитуда напряжения управления, так и угол сдвига фаз между напряжениями Uy и Uв , подаваемыми на обмотки статора.
При всех методах управления частота вращения асинхронного двигателя изменяется за счет образования несимметричного эллиптического магнитного поля, которое можно представить в виде двух круговых вращающихся полей прямой и обратной последовательностей (см. гл. 3). Изменение напряжения на обмотке управления по величине или фазе приводит к изменению соотношений между амплитудами потоков прямой и обратной последовательностей. В связи с этим изменяется вид механической характеристики, а следовательно, и частота вращения двигателя. Уменьшения частоты вращения достигают путем увеличения эллиптичности магнитного поля, т. е. путем увеличения поля обратной последовательности, которое создает тормозной момент. Однако при этом возрастают и потери мощности в двигателе.
Требования, предъявляемые к исполнительным двигателям. К исполнительным двигателям, работающим в автоматических устройствах, кроме общих требований, предъявляемых ко всем машинам (малые габариты и масса, дешевизна, высокий КПД, надежность работы я т. п.), предъявляют и специфические требования, главными из которых являются: управляемость двигателя при всех режимах работы (отсутствие самохода), линейность механических и регулировочных характеристик, высокое быстродействие, бесшумность работы, малая мощность управления, отсутствие радиопомех и др. Указанные специфические требования являются определяющими и заставляют в ряде случаев отказываться от традиционных конструкций машин общего применения, что ведет к увеличению габаритных размеров и массы, уменьшению КПД и пр.

Отсутствие самохода. Наибольшая асимметрия магнитного поля в исполнительном двигателе наблюдается при амплитудном управлении, когда отсутствует напряжение на обмотке управления; при фазовом управлении, когда напряжения Uy и Uв совпадают по фазе. При этом коэффициент сигнала αэ = 0 и ротор не должен вращаться. Рассмотрим, при каких условиях это требование выполняется.
При Uу = 0 двигатель может рассматриваться как однофазный. В этом случае прямое и обратное магнитные поля равны по значению, а результирующий вращающий момент равен арифметической разности моментов от прямого Мпр и обратного Мобр полей: Мрез = Мпр — Мобр .
В однофазном двигателе общего применения результирующий момент при пуске равен нулю, однако в довольно широком диапазоне частот вращения (при s Мприли, в крайнем случае, Мобр = Мпр . Таким образом, условие отсутствия самохода в области изменения скольжения 1 > s > 0 является выполнение неравенства
Зависимость М =f(s) для прямого и обратного полей одинаковы, но so6p = 2 — sпp . Поэтому полученное условие отсутствия самохода можно представить в следующем виде:
Условие (5.3) выполняется при sкр ≥ 1. На рис. 5.2, а и б показаны зависимости Мрез = f(s) для однофазного двигателя при sкp = 0,5 и sкp = 1 соответственно. Во втором случае в области скольжения 1 > s > 0 имеется неравенство Мобр > Мпр , следовательно, в однофазном режиме ротор двигателя останавливается. Более подробные исследования показывают, что при некоторых параметрах исполнительного двигателя самоход возможен и при sкp = 1. Однако при sкp = 1,1 ÷ 1,2 самоход исключается. В зависимости от причин, вызывающих самоход, его подразделяют на параметрический и технологический.
| Рис. 5.2. Зависимости M = f(s) для однофазного двигателя | 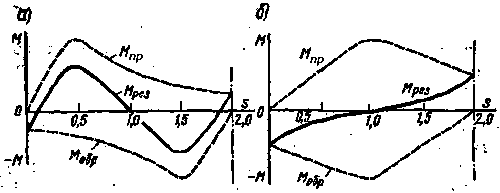 |
Параметрический самоход. Он возникает в результате неправильного выбора параметров двигателя при проектировании. Для устранения параметрического самохода исполнительные двигатели проектируют так, чтобы sкp = 2 ÷ 4. При этом обеспечивается не только отсутствие самохода, но и улучшение линейности механических характеристик двигателя. Большие значения sкp могут быть получены только при повышенном (по сравнению с обычными) значении сопротивления ротора, что снижает КПД исполнительного двигателя.
Технологический самоход. Он может возникать из-за технологических допусков и некачественного изготовления двигателя. Наличие межвиткового замыкания обмотки статора вызывает появление эллиптического поля даже при включении одной обмотки (см. § 4.17). Аналогичный «эффект короткозамкнутого витка» может получиться вследствие замыкания между собой листов статорного пакета из-за плохой изоляции листов стали, наличия заусениц и т. д. Причиной технологического самохода может быть также неравенство магнитных проводимостей по продольной и поперечной осям машины, вызванное неравномерностью воздушного зазора, различными толщинами полого ротора или магнитной анизотропией ферромагнитного материала статора и ротора (неравенство магнитных проводимостей стали вдоль и поперек проката).
Чтобы предотвратить технологический самоход, требуется высококачественно выполнять все технологические операции при изготовлении исполнительных двигателей (тщательно изолировать обмотки и стальные листы, обеспечивать строгую концентричность ротора и статора и пр.). Для устранения влияния магнитной анизотропии ферромагнитного материала применяют «веерную» сборку, при которой листы укладывают в пакете со сдвигом на одно или несколько зубцовых делений по отношению к предыдущему листу.
Устройство исполнительных двигателей. Управляемость исполнительным двигателем обеспечивается путем применения ротора с большим активным сопротивлением. Одним из возможных решений является применение ротора с обмоткой типа «беличья клетка». Для увеличения сопротивления стержни выполняют из материала с повышенным удельным сопротивлением (латуни, фосфористой бронзы и др.) и сравнительно малым поперечным сечением. Конструкция такого двигателя (рис. 5.3, а) мало отличается от конструкции обычного асинхронного двигателя. Его основным недостатком является большой момент инерции ротора, снижающий быстродействие исполнительного двигателя. Для уменьшения момента инерции в двигателях этого типа применяют роторы относительно малого диаметра с отношением длины к диаметру la /Da = 1,6 ÷ 2,4.
В настоящее время промышленность выпускает исполнительные асинхронные двигатели с беличьей клеткой «сквозной конструкции» (рис. 5.3,б). В этих двигателях внутренний диаметр статора равен диаметру расточки под подшипники в щитах, что дает возможность обрабатывать внутреннюю поверхность статора и отверстий под подшипники одновременно, после установки подшипниковых щитов. В результате существенно уменьшается эксцентриситет ротора и двигатели могут быть выполнены с весьма малым воздушным зазором (0,03—0,05 мм), что позволяет при неизменных габаритах двигателя увеличить его вращающий момент или повысить КПД и cos φ. В таких двигателях для уменьшения момента инерции ротор выполняют малого диаметра (la /Da = 2 ÷ 3), а обмотку статора обычно заливают эпоксидной смолой,
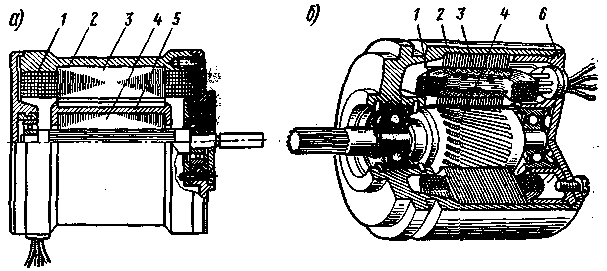 |
| Рис. 5.3. Устройство исполнительных двигателей с беличьей клеткой на роторе: 1 — обмотка статора; 2 — корпус; 3 — статор; 4 — ротор; 5 —беличья клетка; 6— подшипниковый щит |
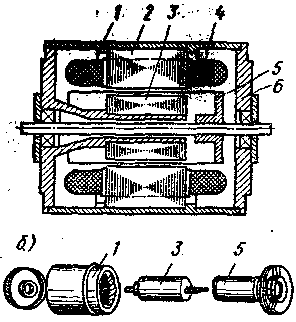 |
| Рис. 5.4. Устройство двигателя с полым немагнитным ротором (а) и его основные конструктивные элементы (б):1 — корпус; 2 — внешний статор; 3—внутренний статор; 4 — обмотка статора; 5 — полый немагнитный ротор; 6 — подшипниковый щит |
благодаря чему она образует вместе с пакетом статора монолитную конструкцию.
Значительное распространение имеют исполнительные двигатели с полным немагнитным ротором (рис. 5.4) и внешним статором, на котором расположены две обмотки, сдвинутые в пространстве на угол 90°. Ротор выполнен в виде тонкостенного полого цилиндра из алюминия. Для уменьшения магнитного сопротивления двигателя имеется также внутренний статор, набираемый из листов электротехнической стали, так же как и внешний статор. При прохождении тока по обмоткам статора создается вращающееся магнитное поле и в роторе индуцируется ЭДС, направленная по образующей цилиндра. Под действием этой ЭДС в роторе возникают вихревые токи, которые, взаимодействуя с вращающимся полем, создают электродинамические усилия и вращающий момент. Характерной особенностью двигателя с полым немагнитным ротором является значительный ток холостого хода, составляющий 85—95% от номинального. Это объясняется тем, что в рассматриваемом двигателе расчетное значение эффективного воздушного зазора δэ (с учетом толщины полого ротора) значительно больше, чем в асинхронном двигателе нормального исполнения. Так, например, при толщине стенки немагнитного ротора Δ = 0,5 ÷ 1 мм и зазорах между ротором и статорами δ1 = δ2 = 0,05 ÷ 0,1 мм величина δэ = 0,6 ÷ 1,2 мм вместо 0,1—0,2 мм у соответствующего асинхронного исполнительного двигателя с беличьей клеткой и 0,03—0,05 мм у двигателя «сквозной конструкции». Иногда полый ротор выполняют ферромагнитным (стальным). При этом внутренний статор не требуется и конструкция двигателя сильно упрощается. Однако двигатель с полым ферромагнитным ротором имеет ряд существенных недостатков, основными из которых являются возможность прилипания ротора к статору при неравномерном воздушном зазоре или износе подшипников и пониженное быстродействие (в 10 — 20 раз) по сравнению с быстродействием двигателя с немагнитным ротором (из-за увеличения момента инерции и снижения вращающего момента).
17.Основные типы серийно выпускаемых двигателей. Низковольтные, высоковольтные, крановые и металлургические асинхронные двигатели.
Электродвигатели выпускаются сериями, а для массового применения – едиными сериями. Для единых серий характерен высокий уровень унификации деталей и узлов, максимальная взаимозаменяемость. Для этого используют одни и те же штампы. Например, для того, чтобы пластины роторов и статоров использовались в машинах разной мощности, наращивание мощности достигается изменением длины пакетов пластин. Выпускаются специальные серии – крановые, металлургические, судовые, тяговые и т.д.
В основу разделения на тип и размер положен параметр – высота оси вращения h.
Каждая h выпускается двух типов размеров с разной длиной пакета S и M, L и М, S и L.
Синхронные частоты вращения n0 = 3000, 1500, 1000, 750, 500 об/мин.
Изготавливаются в двух исполнениях:
1. Закрытое обдуваемое,
2. Защищенное с внутренней самовентиляцией IP23. h = 50¸132 мм изоляция класса В,







