Схемы электрических исполнительных механизмов с электродвигателем
 Электрические исполнительные механизмы с электродвигателем предназначены для перемещения различных органов запорно-регулирующей трубопроводной арматуры поворотного принципа действия (шаровые и пробковые краны, поворотные дисковые затворы, заслонки).
Электрические исполнительные механизмы с электродвигателем предназначены для перемещения различных органов запорно-регулирующей трубопроводной арматуры поворотного принципа действия (шаровые и пробковые краны, поворотные дисковые затворы, заслонки).
Основными узлами исполнительного механизма являются: электродвигатель, редуктор, ручной привод, блок сигнализации положения. В механизмах используются синхронные и асинхронные двигатели переменного тока. Понижение частоты вращения и увеличение крутящего момента осуществляются при помощи комбинированных червячно-зубчатых передач. Ручное управление производится при помощи ручного привода. Воздействие на штурвал нажатием вдоль оси вала при остановленном двигателе приводит к зацеплению ручного привода с валом электродвигателя и передаче крутящего момента на выходной вал.
Исполнительные механизмы с электродвигателем бывают однооборотные и многооборотные, позиционные и пропорциональные. Схема двухпозиционного исполнительного механизма с двухфазным конденсаторным электродвигателем приведена на рис. 1(а).
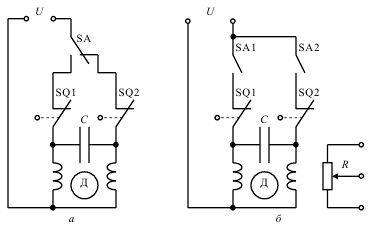
Рис. 1. Схемы исполнительных механизмов с двухфазными электродвигателями: а — схема двухпозиционного исполнительного механизма; б — схема пропорционального исполнительного механизма
Переключатель SA задает направление вращения ротора электродвигателя, подключая конденсатор С либо к одной, либо к другой обмотке электродвигателя. Если переключателем SA замкнуть цепь, содержащую SQ1, то электродвигатель включается и перемещает выходной орган исполнительного механизма до тех пор, пока он не достигнет крайнего положения и не переключит концевой выключатель SQ1. При этом контакт SQ1 разомкнётся, двигатель отключится. Чтобы перевести выходной орган в другое крайнее положение, необходимо переключить SA. Двигатель реверсируется и будет работать до размыкания контакта концевого выключателя SQ2.
Схема пропорционального исполнительного механизма представлена па рис. 1(б). Замыкание контакта SA1 вызывает перемещение выходного органа исполнительного механизма в прямом направлении, а замыкание SA2 — в обратном. Разомкнув контакт, можно остановить механизм в любом промежуточном положении выходного органа. Потенциометр R используется в качестве датчика положения. Концевые выключатели SQ1 и SQ2 отключают электродвигатель в крайних положениях, защищая механизм от поломки.
Схема исполнительного механизма с трехфазным электродвигателем представлена на рис. 3.
Такой исполнительный механизм может использоваться, например, для управления задвижкой. Схема содержит контактор КМ1, включающий механизм на открывание задвижки, с кнопкой SB1 «открыть» и контактор КМ2 с кнопкой SB2 «закрыть». Концевой выключатель SQ1 срабатывает в крайнем положении «закрыто». На схеме концевые выключатели изображены в среднем положении задвижки, ни один из них не сработал.
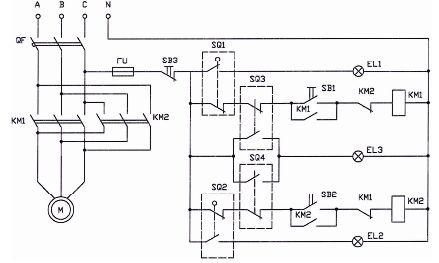
Рис. 2. Схема исполнительного механизма с трехфазным электродвигателем
При нажатии кнопки SB1 сработает КМ1 и включит электродвигатель на открывание задвижки. В крайнем открытом положении сработает SQ1 и своим размыкающим контактом отключит КМ1 и, соответственно, электродвигатель, а замыкающим контактом включит лампочку сигнализации EL1 «открыто».
Если после этого нажать кнопку SB2, то сработает КМ2 и включит электродвигатель на закрывание задвижки. Когда задвижка закроется, сработает SQ2, отключит КМ2 и включит сигнализацию «закрыто» (EL2).
Исполнительный механизм оборудован муфтой предельного крутящего момента. В случае превышения момента на валу, например, при заклинивании задвижки в процессе открывания, сработает выключатель SQ3 и отключит электродвигатель, отключив контактор КМ1. При заклинивании механизма в процессе закрывания сработает SQ4 и отключит КМ2 и электродвигатель. Оба выключателя при срабатывании включают лампу индикации EL3 «авария». Кнопкой SB3 можно остановить электродвигатель в промежуточном положении задвижки.
Решение задач по ТОЭ, ОТЦ, Высшей математике, Физике, Программированию.

| Главная | Цены | Оплата | Примеры решений | Отзывы | Ccылки | Теория | Книги | Сотрудничество | Форум |
| Теория / Электрические микромашины / Лекция 16. Исполнительные двигатели постоянного тока |
2. ИСПОЛНИТЕЛЬНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Несмотря на ряд существенных недостатков, связанных с наличием скользящего контакта между щеткой и коллектором, исполнительные двигатели постоянного тока широко используются в системах автоматического управления, регулирования и контроля, поскольку обладают и рядом положительных качеств, в частности такими как: плавное, широкое и экономичное регулирование частоты вращения; практическое отсутствие ограничений на максимальную и минимальную частоту вращения; большие пусковые моменты; хорошая линейность механических а при якорном управлении и регулировочных характеристик. Как и любые исполнительные двигатели, эти имеют две обмотки: обмотку возбуждения и обмотку управления. При этом напряжение управления может подаваться либо на обмотку якоря, либо на обмотку возбуждения. Поэтому различают якорное и полюсное управление. § 2.1 Якорное управление исполнительным двигателем
Рис. 2.1. Схема включения исполнительного двигателя при якорном управлении Схема включения двигателя с якорным управлением показана на рис. 2.1. Напряжение возбуждения подается на обмотку полюсов, напряжение управления — на обмотку якоря. Коэффициент сигнала a здесь равен a = Uу/Uв. Для двигателей с постоянными магнитами a = Uу/Uу.ном. Регулирование частоты вращения осуществляется изменением напряжения управления. При отсутствии насыщения Фв= kфUв, а поскольку Uв = const, магнитный поток возбуждения также остается постоянным, т.е. Фв = const.
Вращающий момент двигателя
Выразим момент в относительных единицах, приняв за базовый момент пусковой момент, развиваемый двигателем при n = 0 и a = 1
Тогда относительное значение момента m = M/Mб Частота вращения при холостом ходе (m = 0 и a = 1) Откуда находим cеkф= 1/nо. Подставляя это значение в (2.1), получим
где n = n/nо— относительная частота вращения двигателя. Уравнение (2.3) есть уравнение механической характеристики исполнительного двигателя при якорном управлении. Решив его относительно n, получим уравнение регулировочной характеристики Механическая мощность в относительных единицах рмх = mn = n(a — n). Угловую скорость, при которой наступает максимум мощности, найдем известным приемом (dpмх/dn = 0), откуда nм= a/2, а максимальное значение механической мощности будет
Приняв за базовую единицу мощность управления при коротком замыкании Ру.к (n = О, a = 1)
На рис. 2.2,а представлены механические, на рис. 2.2,б — регулировочные характеристики, а на рис. 2.3 показана зависимость рмх = f(n) исполнительного двигателя. Проанализируем свойства двигателя при якорном способе управления. Механические характеристикилинейные и параллельные, что означает независимость быстродействия от коэффициента сигнала. Пусковой момент и угловая скорость холостого хода пропорциональны коэффициенту сигнала.
Рис.2.2. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при якорном управлении
Рис. 2.3. Зависимость механической мощности от скорости вращения при якорном управлении Регулировочные характеристикилинейные. Напряжение трогания пропорционально моменту нагрузки. Линейность механических и регулировочных характеристик является важным достоинством якорного управления. Мощность управления резко возрастает с увеличением коэффициента сигнала. Кроме того, она доходит до 95 % полной потребляемой мощности двигателя, поскольку является мощностью якорной цепи, что характерно для двигателей постоянного тока. В данном случае это является существенным недостатком якорного управления, ибо предполагает наличие мощных и дорогих усилителей. Мощность возбуждения остается величиной постоянной, независящей ни от коэффициента сигнала, ни от частоты вращения. К тому же — она небольшая по величине, что также характерно для машин постоянного тока. Максимум механической мощности в сильной степени зависит от коэффициента сигнала и даже при a = 1 не превышает 1/4 базовой мощности. § 2.3. Полюсное управление исполнительным двигателем
Рис. 2.4. Схема включения исполнительного двигателя при полюсном управлении Схема управления приведена на рис.2.4 Напряжение управления подается на обмотку главных полюсов, напряжение возбуждения — на обмотку якоря, по которой в течение всего времени работы двигателя протекает ток возбуждения. В двигателях, мощностью более 10 Вт, для его ограничения включают дополнительное сопротивление Rд. Если пренебречь насыщением магнитной цепь, можно считать Ф = kфUу = kфaUв. Тогда ток якоря
Принимая за базовый момент пусковой (n = 0, a =1))
получим относительное значение момента
Решив его относительно n, получим уравнение регулировочной характеристики
Механическая мощность в относительных единицах рмх= mn = an — a 2 n 2 . Скорость, при которой наступает максимум мощности nм = 0,5/a. Тогда максимальная механическая мощность будет
На рис. 2.5,а представлены механические, на рис. 2.5,б — регулировочные характеристики, а на рис. 2.6 показана зависимость рмх = f(n) исполнительного двигателя при полюсном управлении.
Рис.2.5. Механические (а) и регулировочные (б) характеристики исполнительного двигателя постоянного тока при полюсном управлении Проанализируем эти графики. Механические характеристики линейные, но непараллельные, к тому же и неоднозначные (одну и ту же частоту вращения можно получить при разных значениях a). Пусковой момент прямо-, а частота вращения холостого хода обратно пропорциональны коэффициенту сигнала и при малых a может существенно превышать номинальную, что безусловно опасно для двигателя. Регулировочные характеристикинелинейные, а при m 0,5. Мощность управления пропорциональна квадрату коэффициента сигнала и не зависит от частоты вращения. Она значительно меньше, чем при якорном управлении, что является достоинством данного способа. Мощность возбужденияс увеличением частоты вращения уменьшается и тем быстрее, чем больше a. Максимум механической мощности не зависит от коэффициента сигнала, что также можно отнести к достоинствам полюсного управления. Несмотря на отмеченные достоинства полюсного управления, предпочтение все-таки следует отдать якорному потому, что оно обеспечивает линейные и однозначные характеристики, в принципе исключает самоход (при полюсном он возможен из-за взаимодействия тока якоря с потоком остаточной намагниченности полюсов), обладает более высоким быстродействием, поскольку индуктивность якоря меньше индуктивности обмотки возбуждения.  Горючее в баке автомобиля должно соответствовать предусмотренному  Присадки для двигателя помогают «оживить» устаревший  Система работающего двигателя достаточно защищена от  Работу двигателя обеспечивают сразу несколько важнейших |





 (2.1)
(2.1) (2.2)
(2.2)
 (2.4)
(2.4)
 Мощность управления
Мощность управления
 получим мощность управления в относительных единицах
получим мощность управления в относительных единицах







 С учетом (2.2) уравнение механической характеристики примет вид
С учетом (2.2) уравнение механической характеристики примет вид








