- Лего роботы WEDO 2.0, регламенты и поля для соревнований, инструкции NXT
- Рубрика: Лего роботы WEDO 2.0, регламенты и поля для соревнований, инструкции NXT
- Конструктор Lego WeDo
- Конструктор Lego WeDo 2.0
- Программирование и алгоритмы для lego mindstorms nxt 2.0
- Соревнования роботов
- Поля для соревнований EV3, NXT и arduino
- Положения для проведения соревнований, конкурсов и высотавок по робототехнике
- Инструкции для MINDSTORMS NXT PDF (13 шт.)
- Разное о MINDSTORMS
- Инструкции к роботам LEGO TETRIX
- Схемы роботов EV3, NXT и программы для соревнований
- Инструкции по сборке роботов Lego
- Схемы роботов и инструкции по сборке роботов ev3
- Схемы роботов лего роботов nxt
- Роботизированная машина типа ПОГРУЗЧИК
Лего роботы WEDO 2.0, регламенты и поля для соревнований, инструкции NXT

![]()
КИБОРГИ ИДУТ!
Статья о том, как развиваются роботы, как они показываются в кино и т.д. Почитайте, интересная статья.

Робот сможет одеть человека
Японские специалисты из института NAIST в Токио работают над созданием роботов, способных одевать людей. В настоящее время уже создан прототип, который пока справляется л.
Рубрика: Лего роботы WEDO 2.0, регламенты и поля для соревнований, инструкции NXT
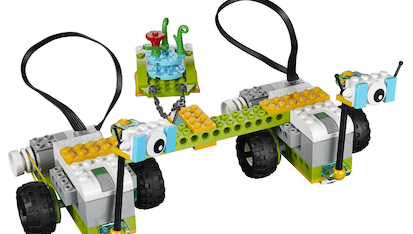
Открываем блок с инструкциями на русском языке для WEDO и WEDO 2.0 Конструктор Lego WeDoКонструктор Lego WeDo 2.0
|
Программирование и алгоритмы для lego mindstorms nxt 2.0
Соревнования роботов
- Соревнования
- Настраиваем робота
- Готовимся к кегельрингу
- Правила соревнования роботов под названием ‘Очисти круг’
- Регламент соревнования ГОНКИ ПО ЛИНИИ
- Регламент соревнования КЕГЕЛЬРИНГ
- Регламент соревнования КЕГЕЛЬРИНГ КВАДРО
- Регламент соревнования КЕГЕЛЬРИНГ МАКРО
- Регламент соревнования МИНИСУМО (ВАРИАНТ 1)
- Регламент соревнования МИНИСУМО (ВАРИАНТ 2)
- Регламент соревнования ПЕРЕТЯГИВАНИЕ КАНАТА
- Регламент соревнования ПОДЪЁМ ПО КАНАТУ
- Регламент соревнования СЛАЛОМ ПО ЛИНИИ
- Регламент соревнования ТЕННИС
- Регламент соревнования роботов по РОБОРЭГБИ
Ваш браузер не поддерживает фреймы
—>
Поля для соревнований EV3, NXT и arduino
Ниже представлены поля для подготовки и проведения соревнований по робототехники возрастных категорий: младшая, средняя, старшая. Рекомендуем использовать поля в школах, лицеях и центрах дополнительного образования детей для подготовки и проведения школьных или городских соревнований.
Научив, конструировать роботов и создавать программы на этих соревновательных полях Вам будет гораздо проще перейти на ступеньку выше — подготовку и участие в районных, краевых / областных соревнованиях.
Часто конструкция и программа робота частично подходит на крупных соревнованиях. Экономится огромное количество времени. Вместо того, чтобы с нуля конструировать машину и писать программу Ваши подопечные могут заняться только доведением своего творения до логического конца.
Из личного опыта: при консультации с судьями они часто удивляются стремлению детишек уничтожить все наработки и сконструировать новое устройство . По их мнению — это лишняя трата времени. Более половины «горе конструкторов» не успевают за 1-2 дня соревнований создать что-либо новое. Это и понятно, ведь даже взрослый человек не сможет сделать профессиональную робототехническую машину в стрессовой ситуации и, одновременно сжатом по времени промежутке.
Поэтому, мой Вам совет как учителю робототехники — тренировки , тренировки и ещё раз тренировки на этих полях. Вот залог успеха! Наши поля для робототехники скачать можно абсолютно бесплатно. Пользуйтесь, удачи Вам, робототехники!
Макет поля для соревнования по скоростному движению вдоль черной линии
Поле позволяет одновременно стартовать двум роботам. Правила соревнований предполагают, что робот должен пропустить соперника, находящегося на перекрестке.
Размер поля: 2400 x 1200 мм.
Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader)
 Младшая возрастная категория. Скачать поле (JPG) Скачать в формате AI и PDF (2 Мб.)
Младшая возрастная категория. Скачать поле (JPG) Скачать в формате AI и PDF (2 Мб.) 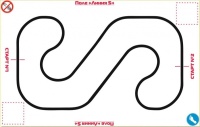 Скачать поле для младшей возрастной категории (JPG)
Скачать поле для младшей возрастной категории (JPG) поле для младшей возрастной категории
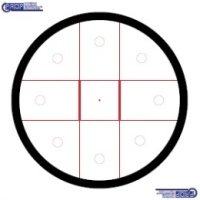
поле для младшей возрастной категорииМакет поля для проведения соревнований Сумо и Кегельринг
В дисциплине Кегельринг задача робота — за наименьшее время вытолкнуть кегли за пределы черной линии. Банки расставлены внутри круга и, обычно, это банки из под напитков 0,33 л. оклеяные клеящей или цветной бумагой.
В дисциплине Сумо побеждает тот робот, который вытолкнет соперника из зоны круга за пределы черной линии первым.
Размер поля: 1250 x 1250 мм.
Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader)
 Скачать поле для младшей возрастной категории (JPG) Скачать в формате AI и PDF (2 Мб.)
Скачать поле для младшей возрастной категории (JPG) Скачать в формате AI и PDF (2 Мб.) 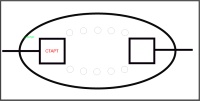 поле для младшей / средней возрастной категории
поле для младшей / средней возрастной категории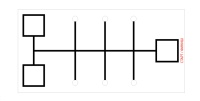 поле для младшей / средней возрастной категории
поле для младшей / средней возрастной категории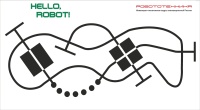 поле для старшей возрастной категории
поле для старшей возрастной категории поле для старшей возрастной категории
поле для старшей возрастной категории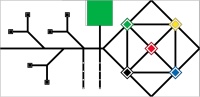 поле для старшей возрастной категории
поле для старшей возрастной категории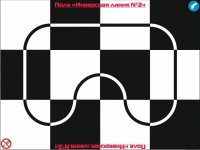 поле для старшей возрастной категории
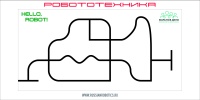
поле для старшей возрастной категории Макет поля для отработки алгоритмов движения вдоль черной линии
Поле в дополнение к перекрёсткам и извилистым линиям содержит блоки инверсной линии (белая линия на черном поле) и штриховую разметку. Правила соревнований предусматривают проезд по заданной траектории за наименьшее время.
Размер поля: 2440 x 1220 мм.
Файл макета в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader)
.jpg) поле для старшей возрастной категории Скачать в формате AI и PDF (2 Мб.)
поле для старшей возрастной категории Скачать в формате AI и PDF (2 Мб.)
Поля отработки алгоритмов движения вдоль черной линии
Данное поле более сложное и содержит множество перекрестков и извилистых линий. В правилах соревнований победа присуждается за проезд по заданной траектории за наименьшее время.
Размер поля: 2440 x 1220 мм.
Файл поля в формате JPG, PDF и Adobe Illustrator (просмотр макета доступен в программе Adobe Acrobat Reader)
 поле для старшей возрастной категории Скачать в формате AI и PDF (2 Мб.)
поле для старшей возрастной категории Скачать в формате AI и PDF (2 Мб.) 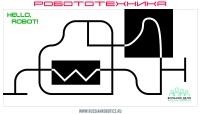 поле для старшей возрастной категории
поле для старшей возрастной категории Положения для проведения соревнований, конкурсов и высотавок по робототехнике
Мы собрали большое количество положения для проведения соревнований по робототехнике в школе лицее или техникуме.
Инструкции для MINDSTORMS NXT PDF (13 шт.)
Разное о MINDSTORMS
Интересные проекты роботов из Челябинска (презентации «lego robots» в Pover Point):
Инструкции к роботам LEGO TETRIX
Блок с инструкциями на русском языке по сборке роботов из набора LEGO TETRIX.
Инструкция № 1: робот на колёсах с рукой-манипулятором:
Схемы роботов EV3, NXT и программы для соревнований
| 10.02.2019, 20:24 |
Схемы роботов лего Lego mindstorms для соревнований. Инструкции по сборке роботов ev3 и nxt
Инструкции по сборке роботов Lego
Схемы роботов и инструкции по сборке роботов ev3
Схемы роботов лего роботов nxt
Линейный алгоритм. Программирование движения вперед, назад, повороты робота EV3.
Циклические алгоритмы Ev3. Программирование ультразвукового датчика и датчика расстояния для Ev3. Движение до препятствия.
Программа для EV3 для соревнований кегельринг.
Программирование условий для Ev3. Переключатели
Соревнование сумо лего. Программа для Сумо ev3
Программа для движения робота Ev3 вдоль черной линии. Логические операции Ev3.
Использование перменных в Lego Ev3 калибровка датчиков. Как задать и использовать переменные в Ev3.
Собственные блоки ev3 — настройка и тестирование
Использование собственных блоков для написания программы для Ev3 прохождения лабиринта
Алгоритм и программа для движения робота ev3 по черной линии с одним датчиком
Движение робота ev3 по черной линии до перекрестка
Программы для работы в формате дистанционного обучения для групп «Робототехника» :
Программа для создания моделей роботов EV3 и NXT скачать — бесплатно
здесь — удобный симулятор Lego Mindstorms ; — бесплатно 15 дней
здесь — программирование с встроенными симуляторами. — Бесплатно 10 дней
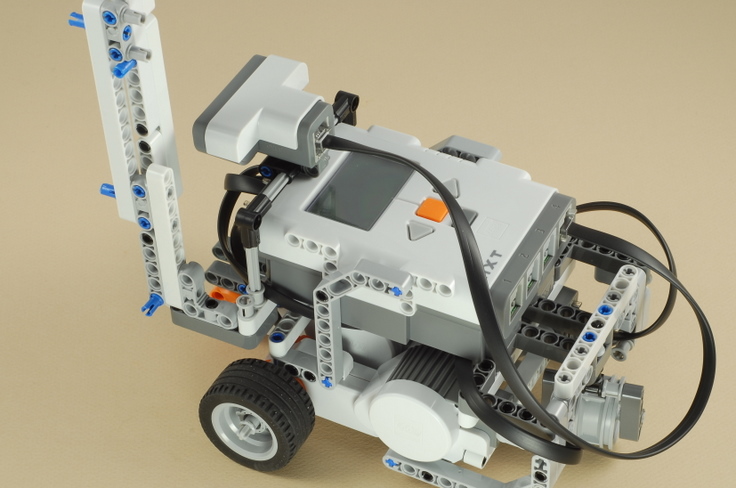
Роботизированная машина типа ПОГРУЗЧИК
| 11.06.2012, 15:24 |
| Погрузчик | Версия лего миндсормс nxt 2.0 (версия 8647) Сложность строительства  , программирования: , программирования:  |
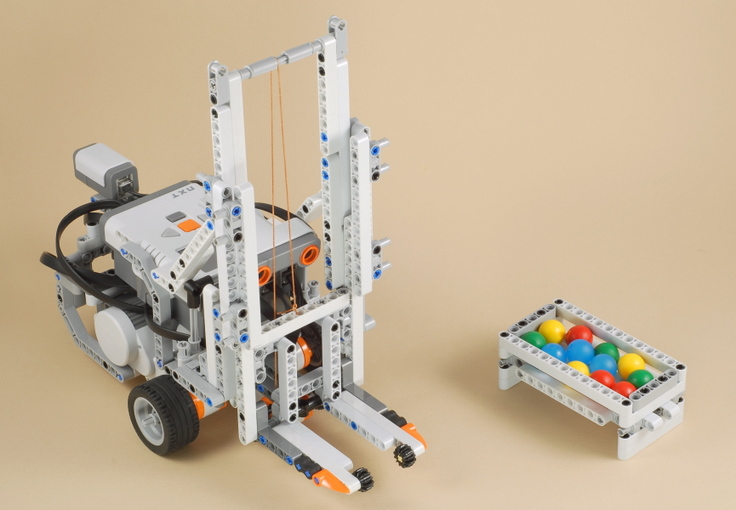
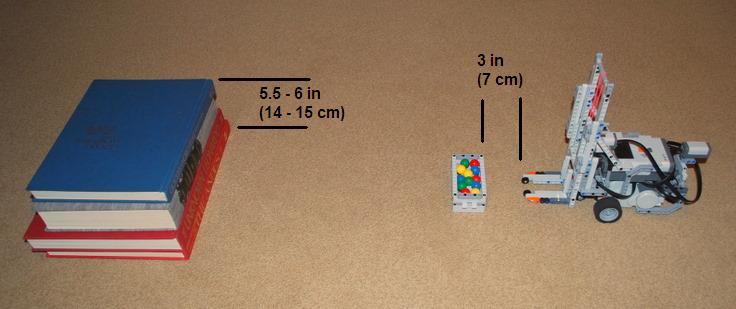
Этот погрузчик может ездить по ковру или твердому покрытию пола, поднимать грузы, которые находятся в поддоне на высоту до 14 см., устанавливать их на пол и на полки или другие платформы, и брать обратно. Датчик цвета используется как цветовой «сигнализатор», чтобы показывать различные операции.
Вы можете запрограммировать погрузчик для выполнения автоматических задач с помощью датчика вращения двигателя и ультразвукового датчика. Если у вас есть свободный блок NXT, то Вы можете создать Bluetooth-соединение между вашим блоком NXT и погрузчиком или компьютером и блоком NXT погрузчика. Вы можете управлять сами беспроводным пультом дистанционного управления Вашей клавиатурой компьютера с помощью этой программы.
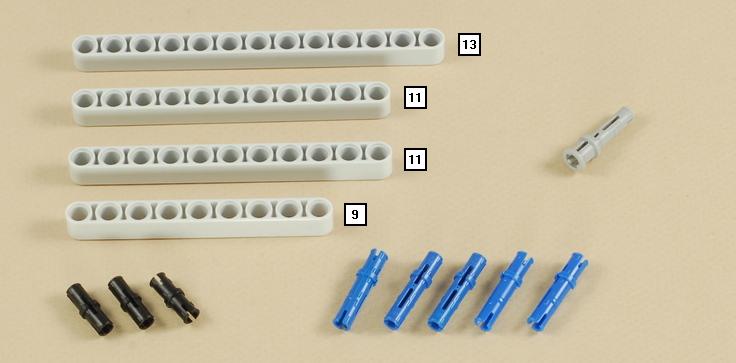
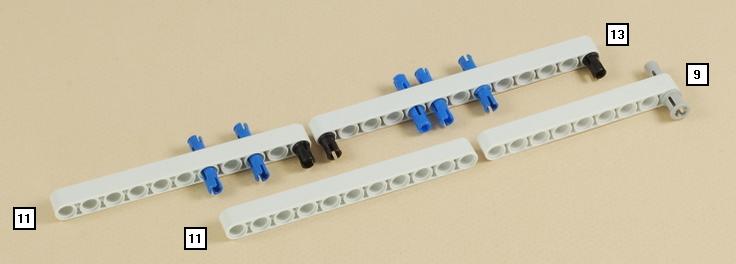
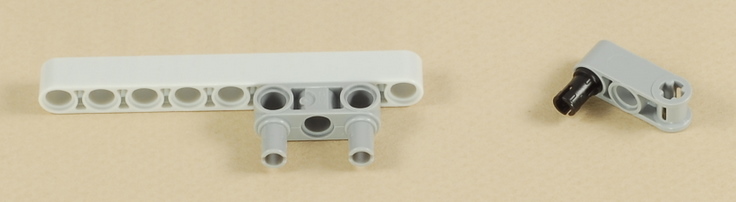
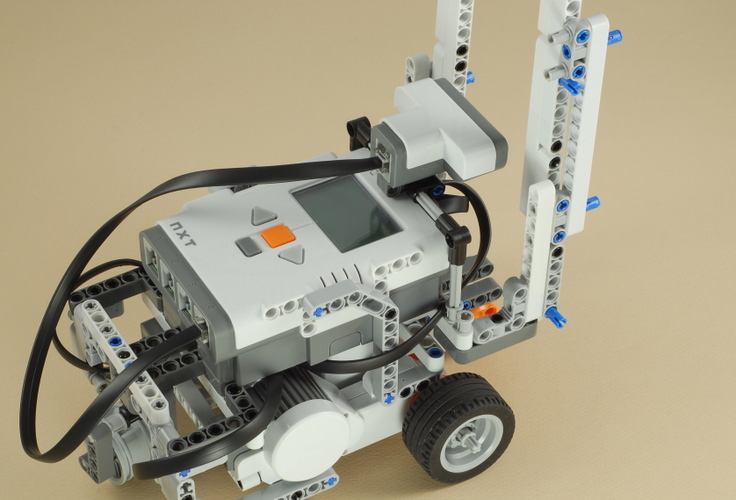
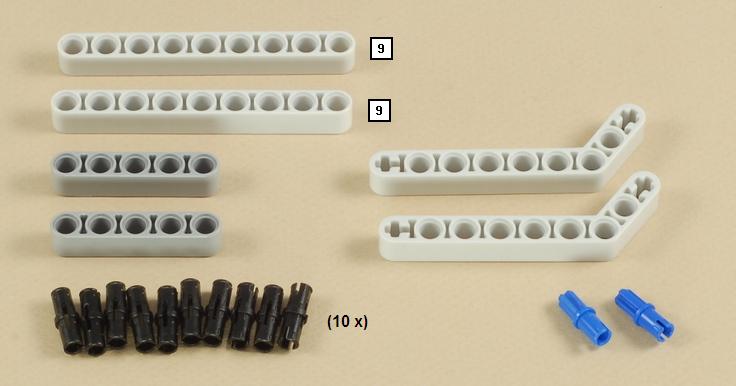
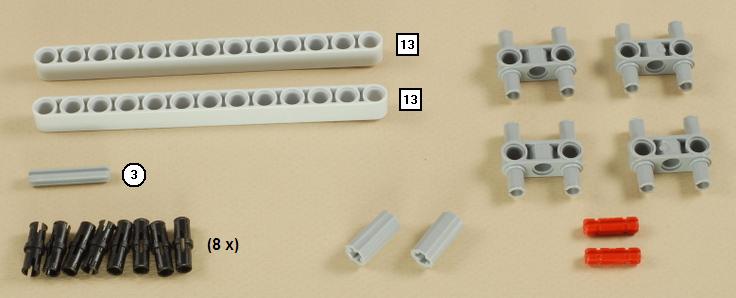
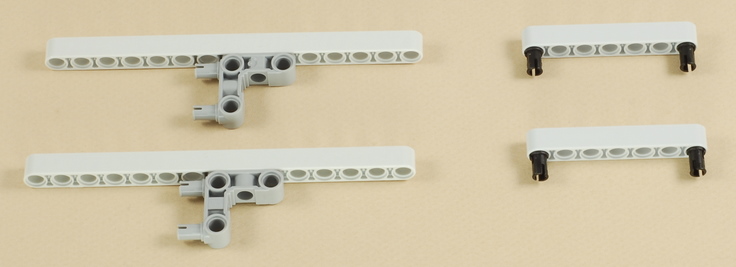
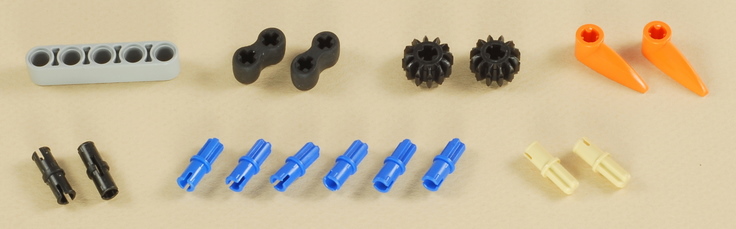
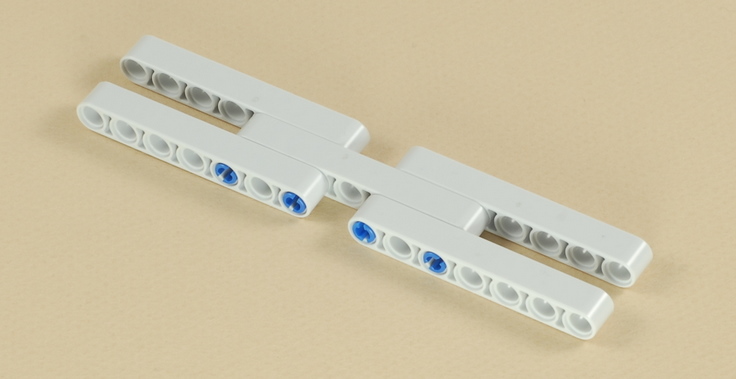
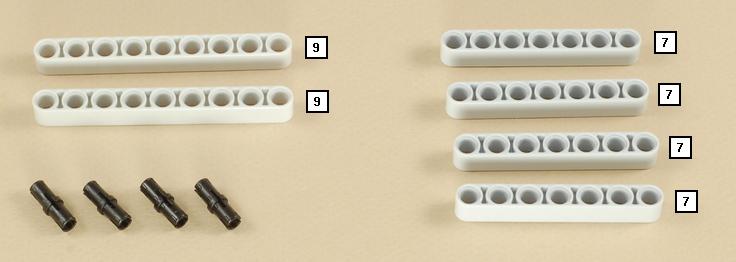
Начните с создания Бота с тремя двигателями. Нажмите на картинку для перехода к инструкции.

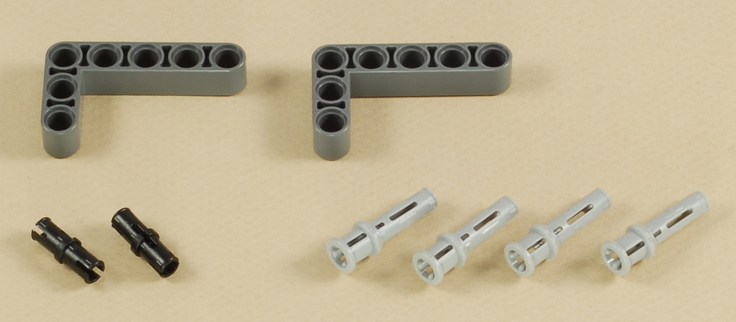
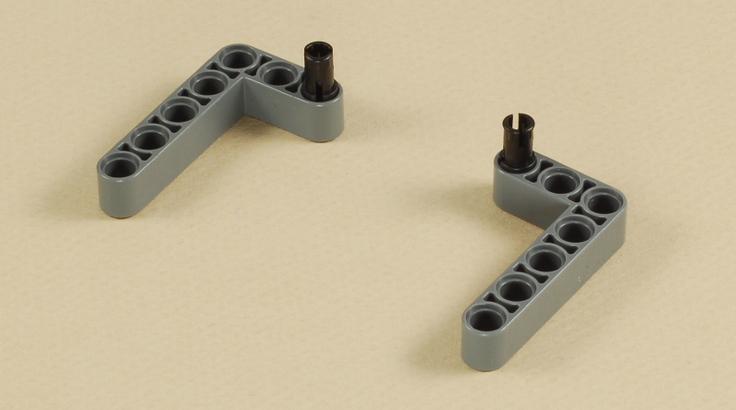
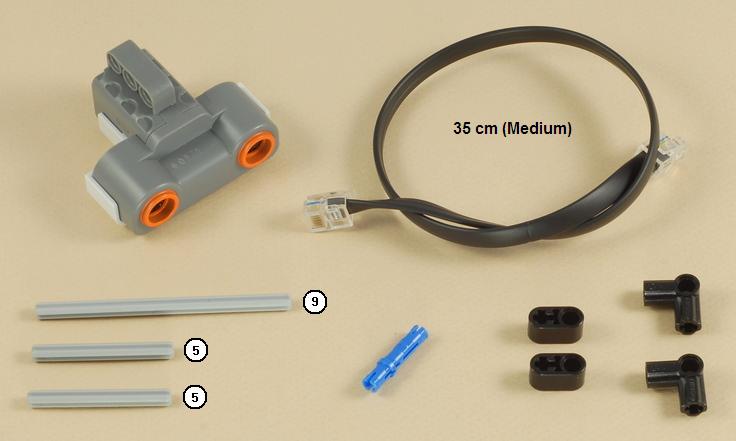
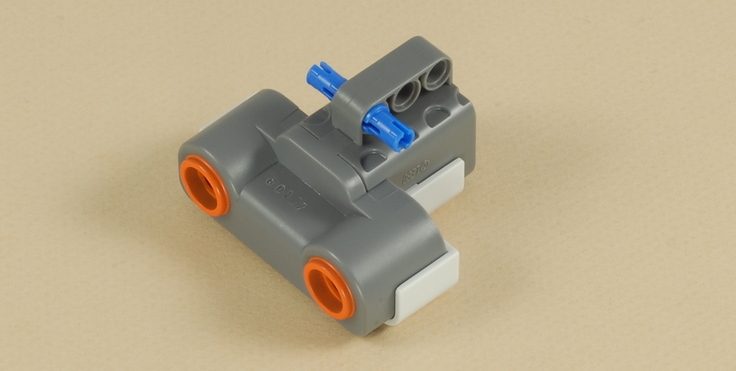
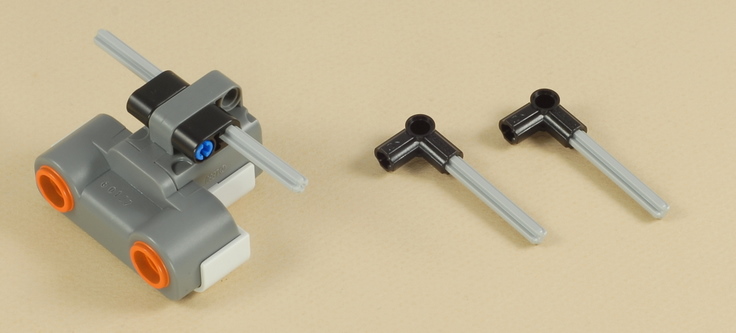
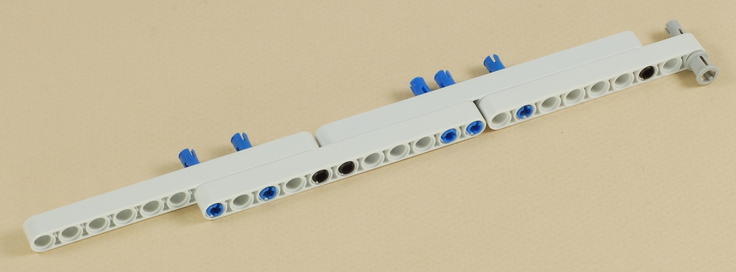
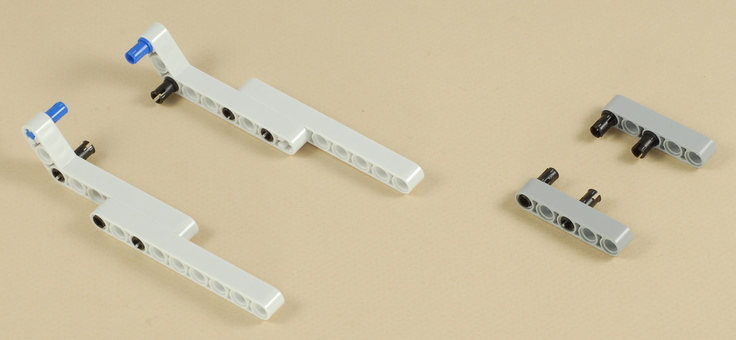
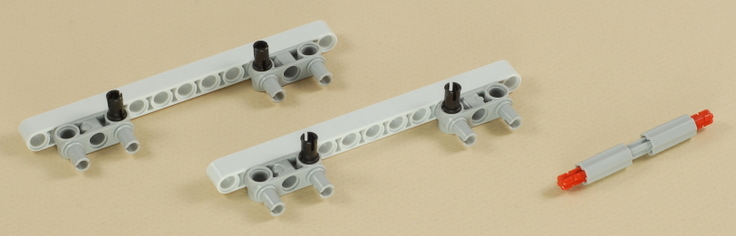
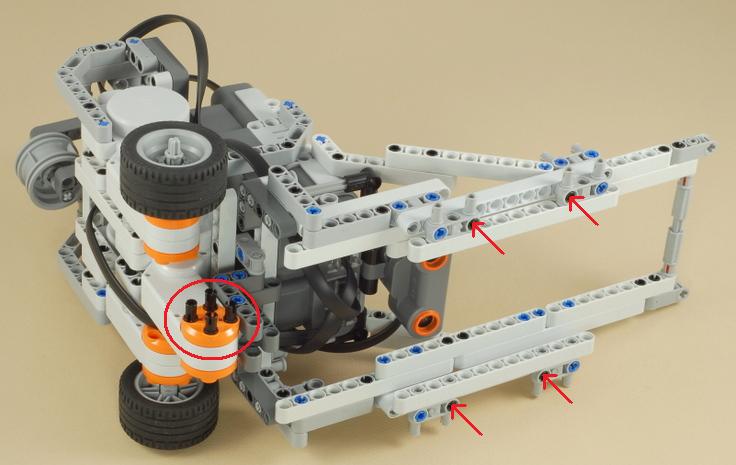
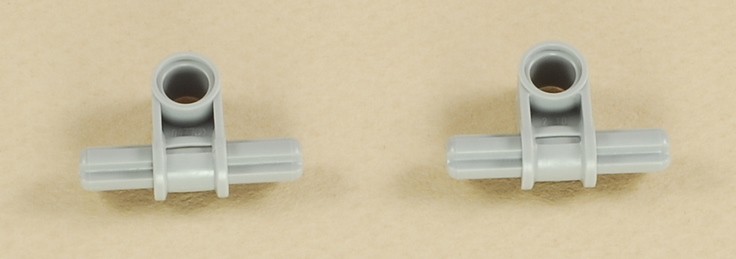
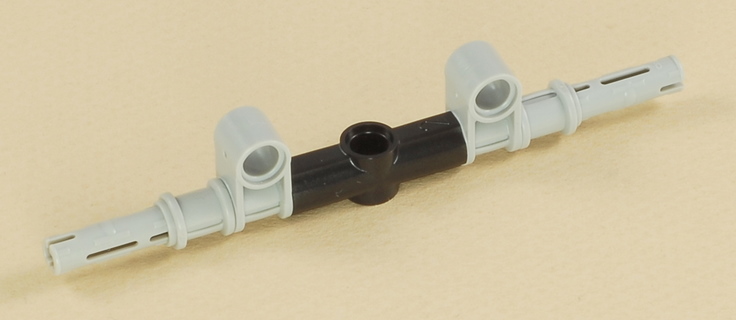
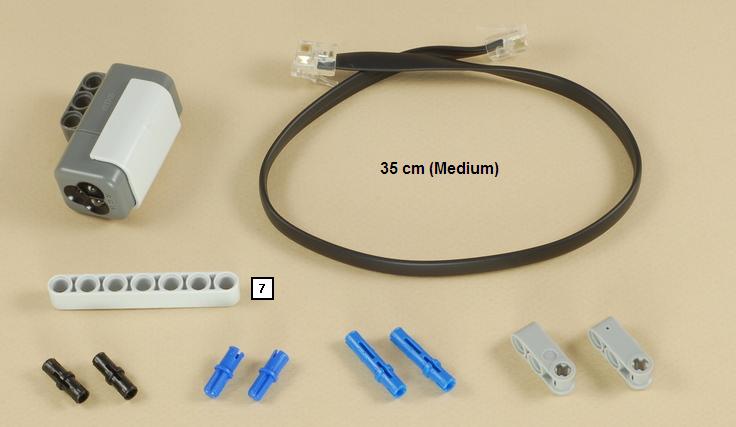
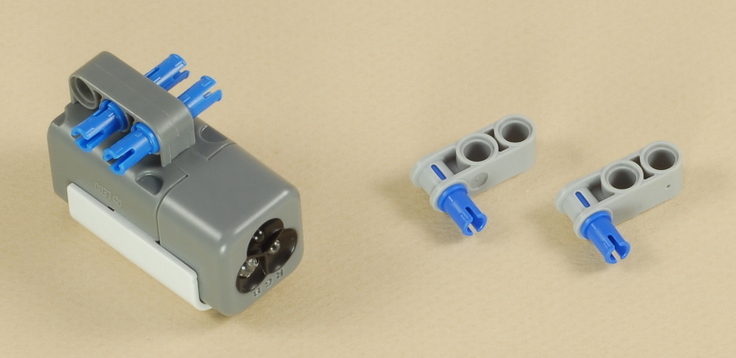
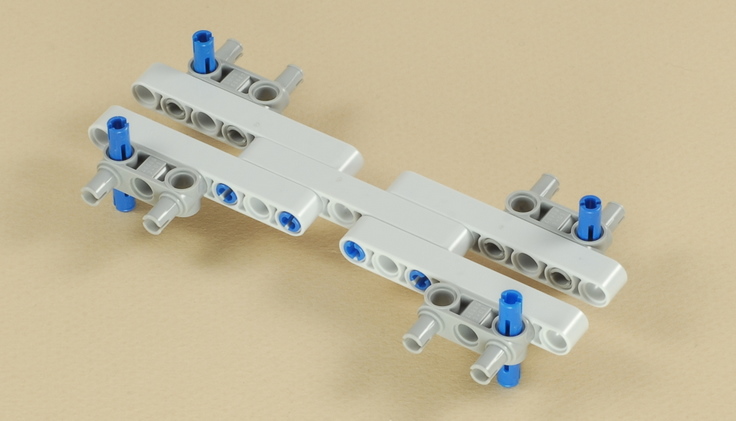
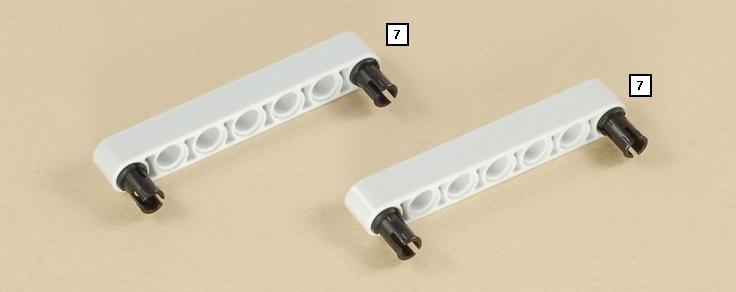
Примечание: Вам нужно будет повернуть колышки на шасси так, чтобы они соответствовали оси на ультразвуковом датчике.
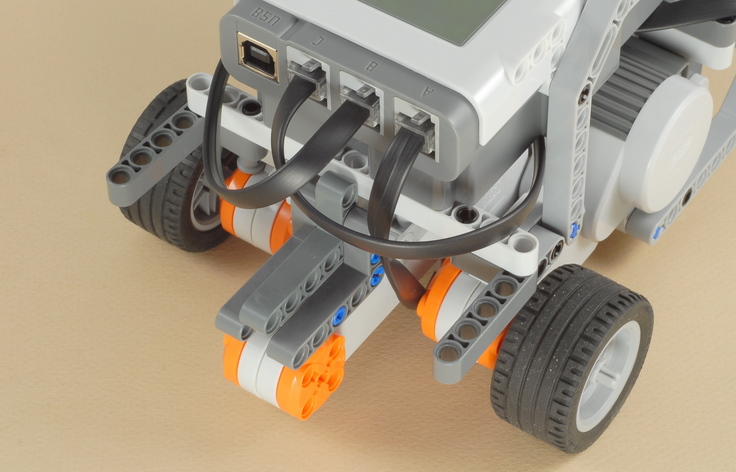
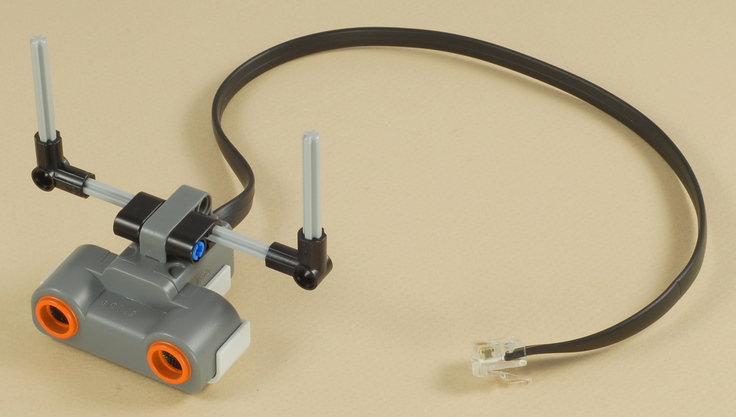
Подключите провода ультразвукового датчика в порт 4 блока NXT.

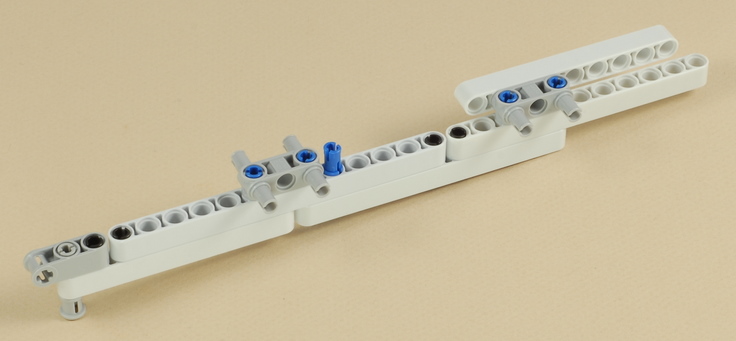

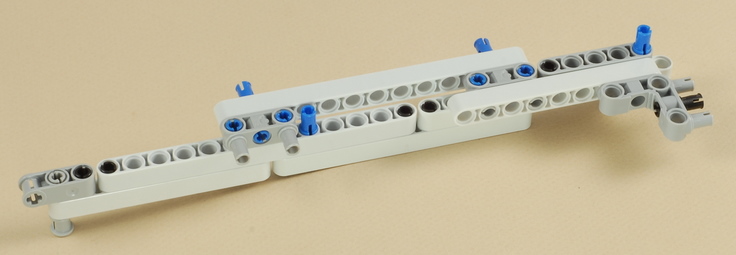





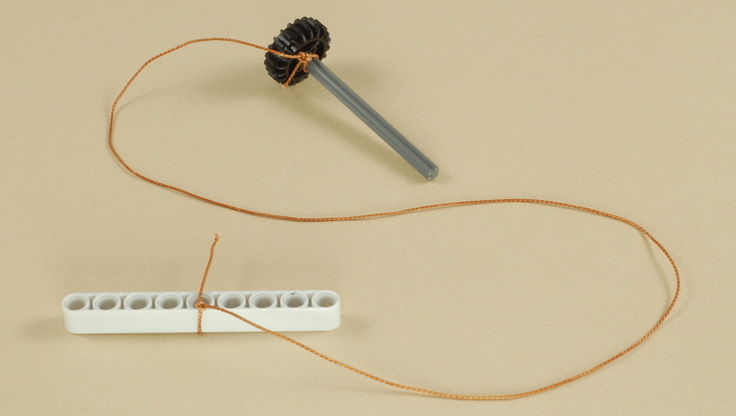
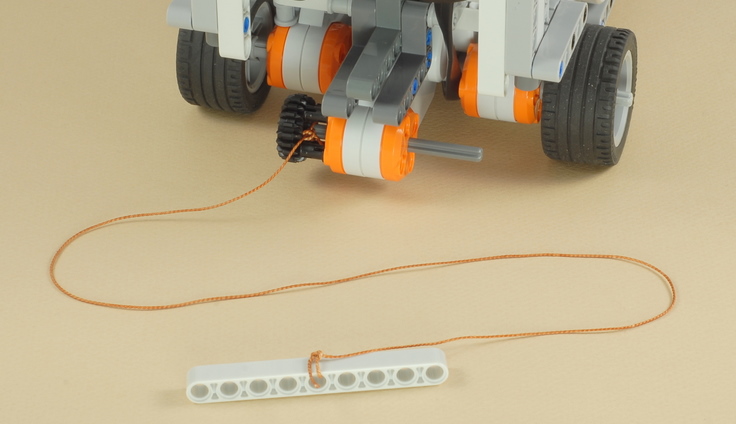
Используйте длинную (61 см) верёвку или тонкую струну.


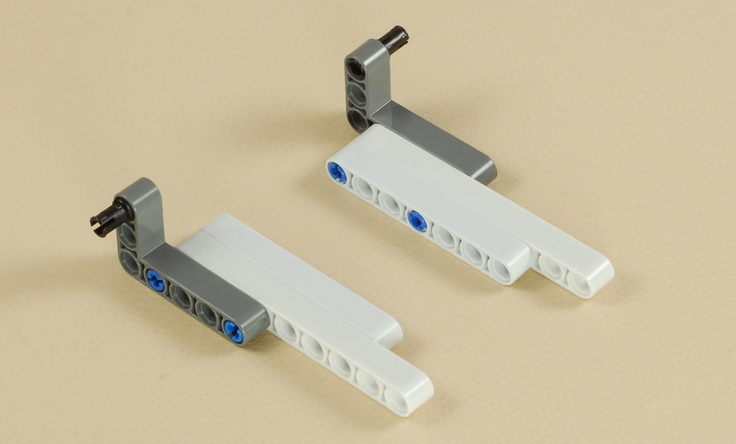
Привяжите один конец нити к оси намотки, а другой конец с отверстием по центру луча, как показано ниже.
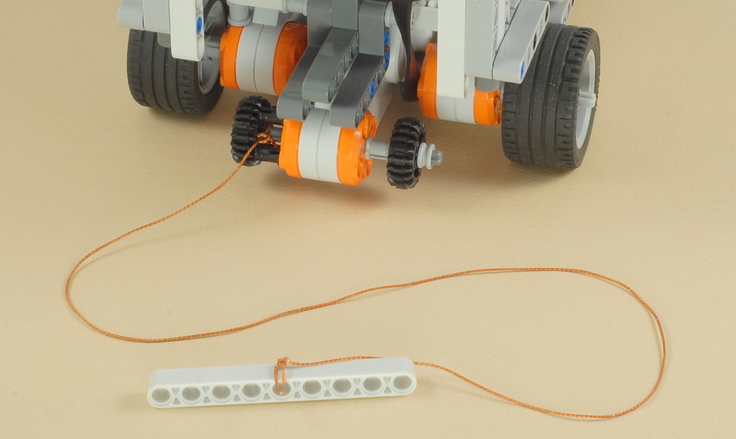
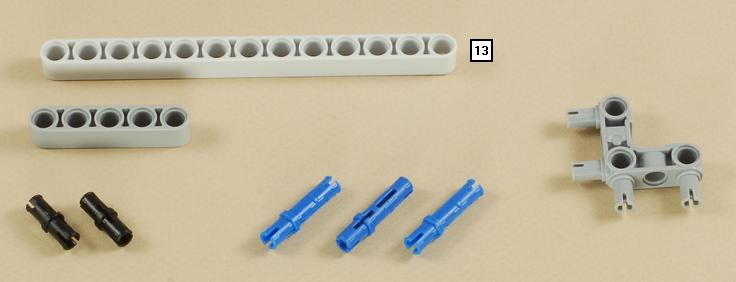
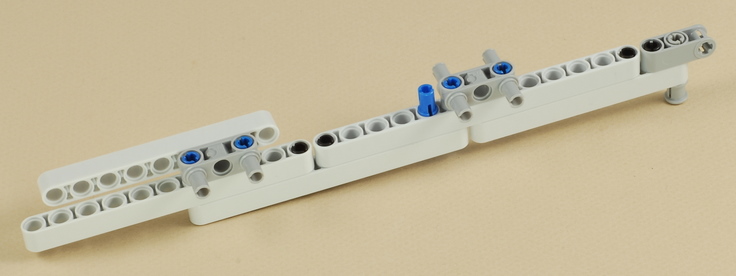
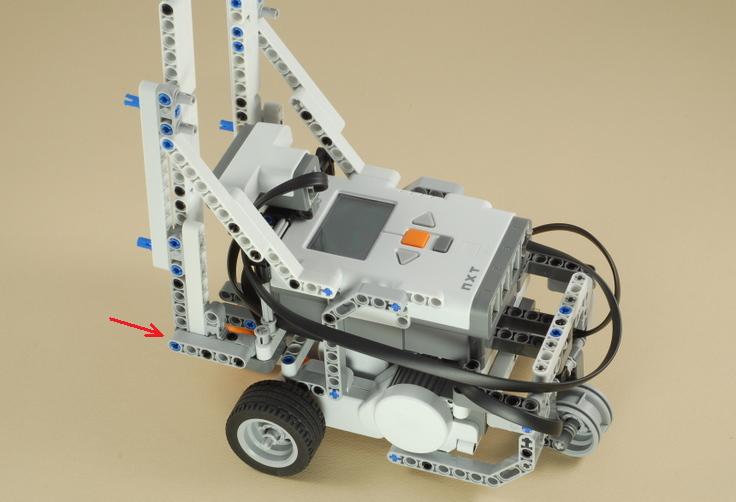
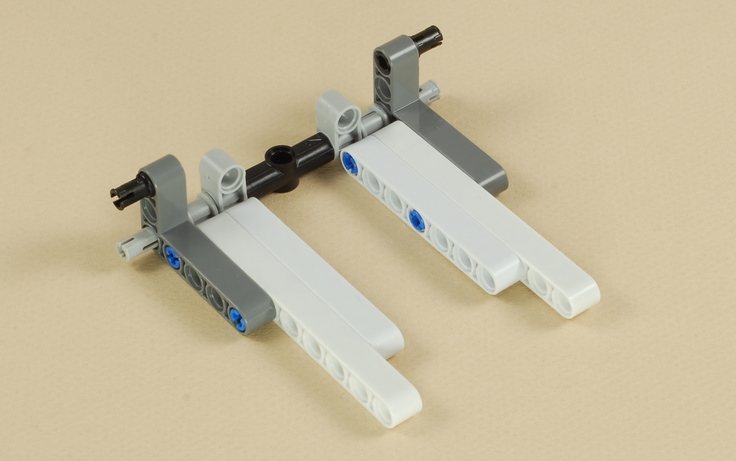
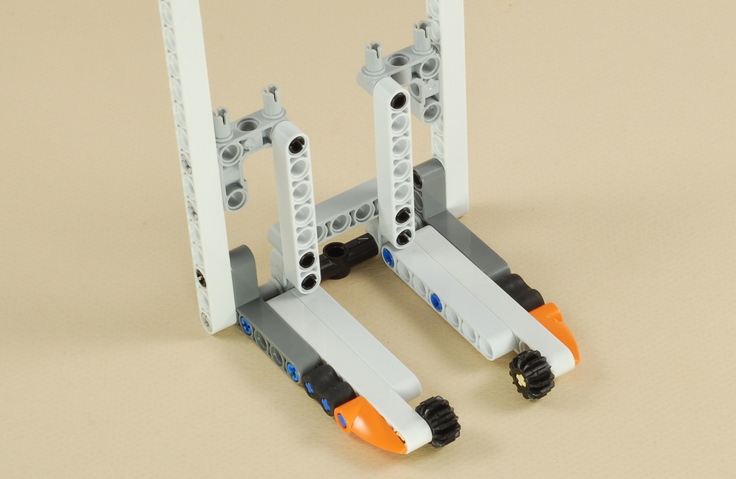
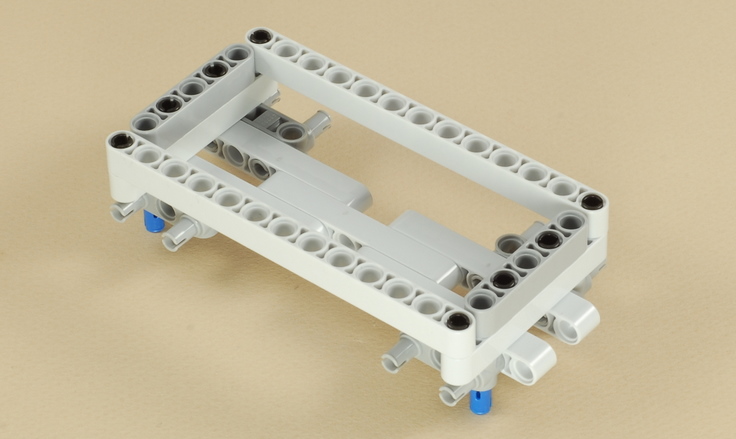
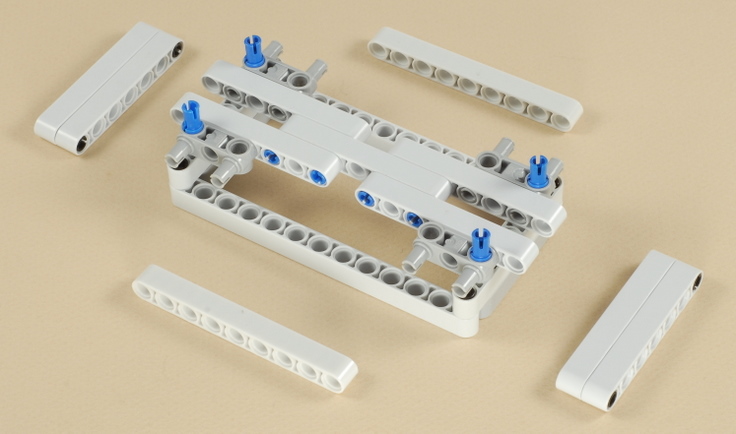
Установка собранного подъёмника:
1. Маршрут верёвки должен быть такой, как показано выше.
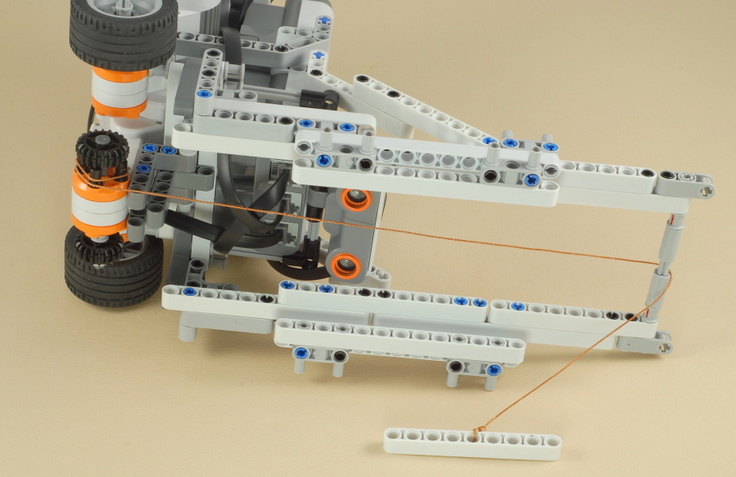
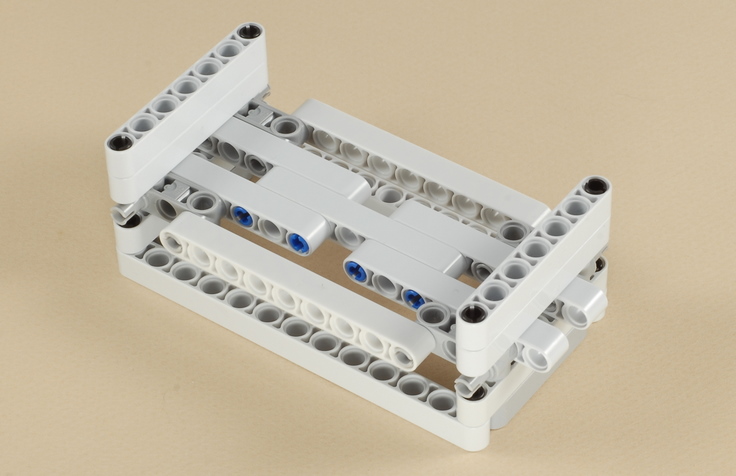
2. Вставьте собранный подъёмник из нижней части погрузчика и внутри рельсов, как показано ниже.
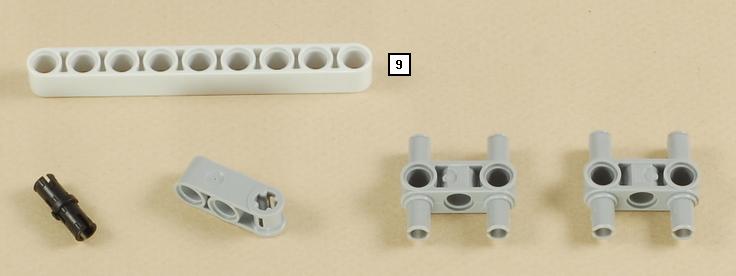
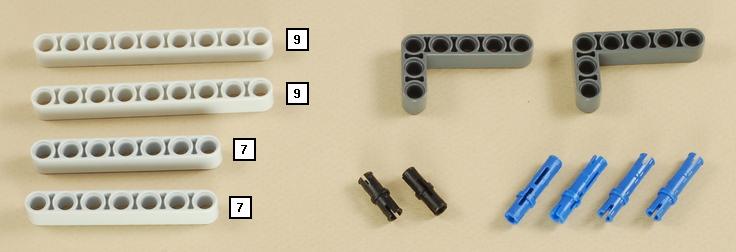
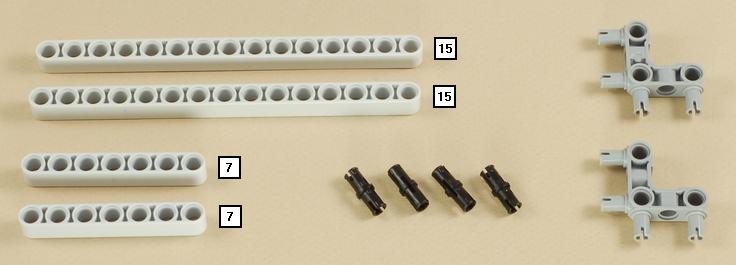
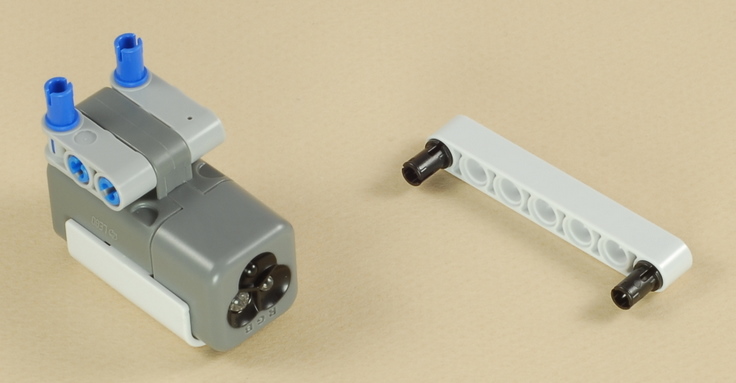
3. Установите 9-лучистую балку в верхней части лифта.
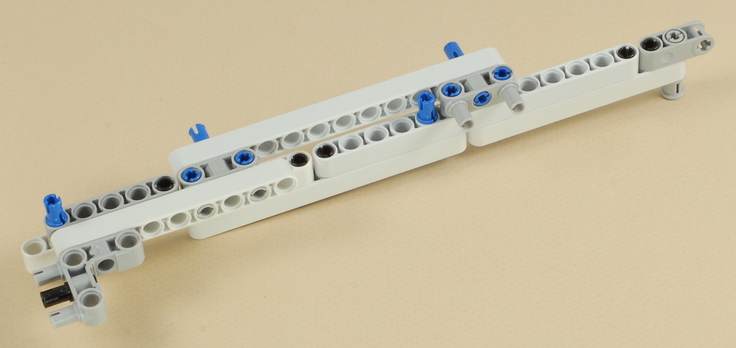
4. Ослабьте верёвку путем намотки передач на двигатель так, чтобы верёвка выходила в передней часть намотки, как показано ниже.
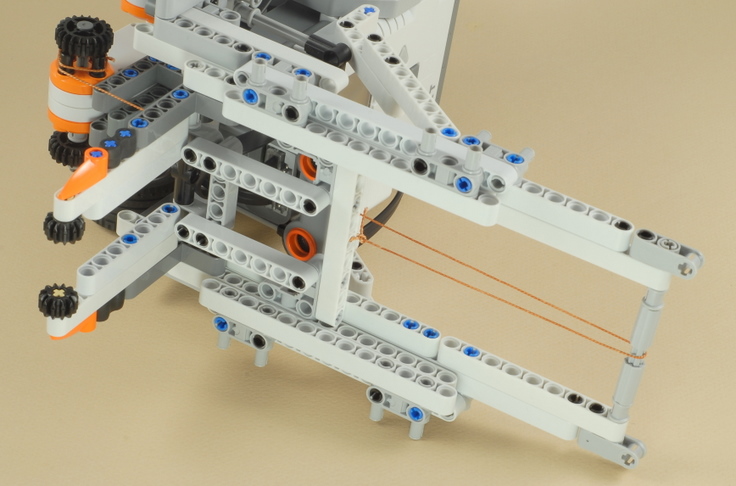
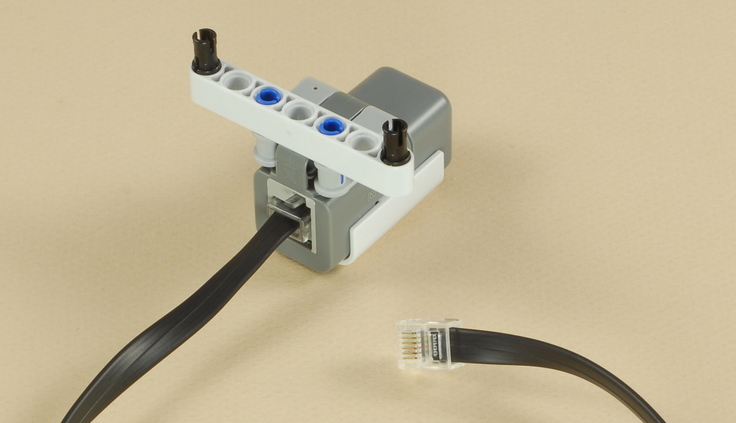
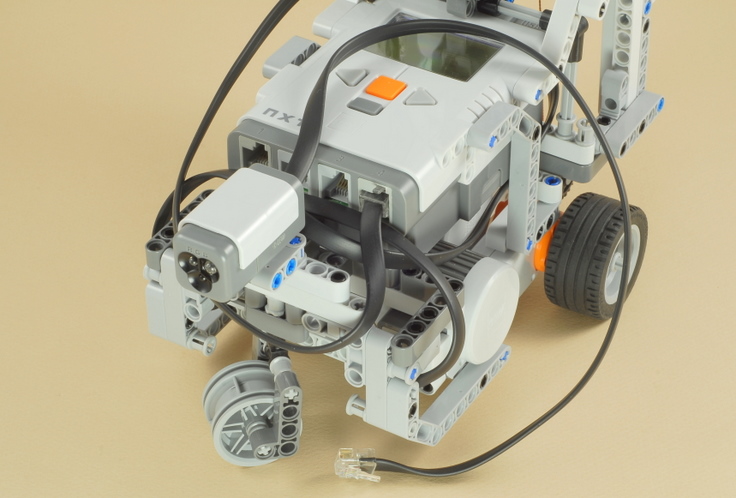
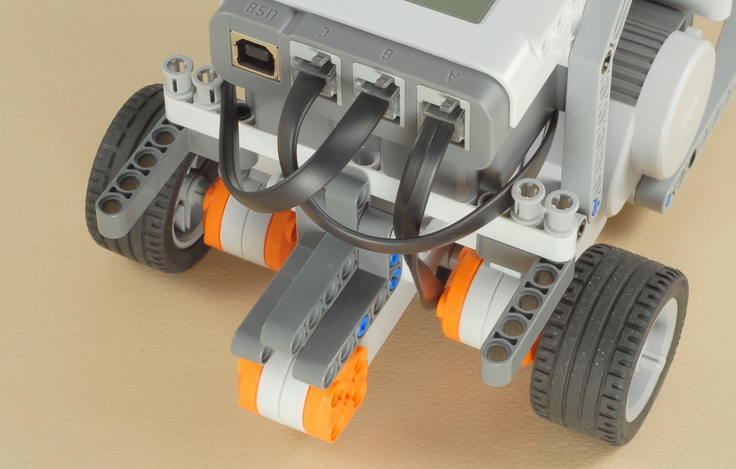
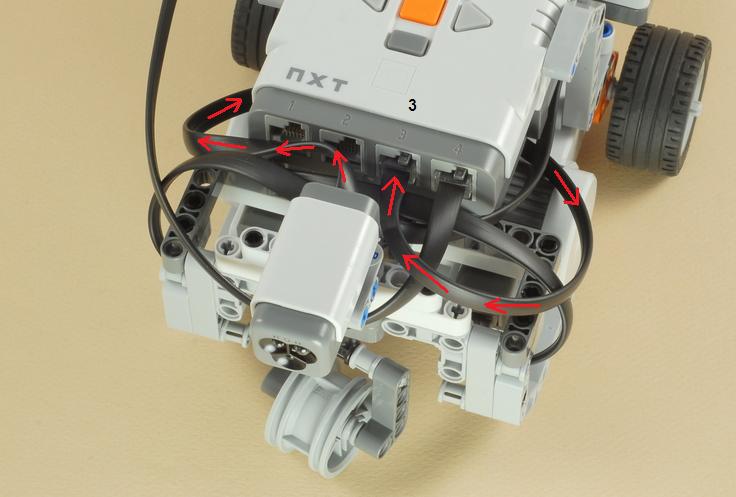
Маршрут провода должен проходить под блоком NXT, как показано ниже, чтобы он не попадал под колесо. Не забудьте подключить его к порту 3.

Программирование погрузчика
Эта программа ForkliftTest является примером автономных (не с дистанционным управлением) задач для погрузчиков. Используется сочетание датчиков вращения и ультразвукового датчика. См. ниже инструкции по настройке погрузчика.
Погрузчик может также работать с Bluetooth-пультом дистанционного управления или дистанционно с компьютера. Стандартные функции удаленного управления, включенные в программного обеспечения NXT 2.0 слишком простые, чтобы легко управлять погрузчиком, но есть альтернативная программа. Если у вас настроено Bluetooth-соединение между компьютером и NXT (Вы можете скачать программу управления NXT по Bluetooth, не используя USB кабель). Эта программа позволяет контролировать погрузчик с помощью клавиатуры или мыши на вашем компьютере. См. ниже инструкцию по настройке соединения.
Если у вас есть два блока NXT, то Вы можете сконструировать этот пульт дистанционного удаленного управления.
Как настроить программу «Forklift Test»
Программа ForkliftTest является автономной NXT-программой, которая может быть использована без Bluetooth пульт дистанционного управления. Это позволит погрузчику поднимать груз шин и размещать его на верхней части платформы. Настройки и параметры для выполнения этой задачи смотрите ниже.
Использование транспортных средств ПК Bluetooth Remote с вилочных погрузчиков
Вам нужен Microsoft Windows компьютер для запуска этого расширения Bluetooth автомобиля удаленных программ. Стандартный пульт дистанционного управления включен в NXT 2.0, также будет работать (на ОС Windows или Macintosh), но гораздо менее удобны для управления подъемника с, потому что не легко может изменить направление подъемника.
Вам нужен работающий Bluetooth соединение между вашим компьютером и NXT. Ваша связь работает, если вы можете скачать программы с компьютера на ваш NXT по Bluetooth вместо кабеля USB. Если вы никогда не пробовали это раньше, обратитесь к Mindstorms руководство пользователя для получения инструкций. Bluetooth может быть сложным, чтобы получить настройки, и некоторые компьютеры не способны это сделать. К сожалению, я не могу помочь вам в этом участие.
Если у вас есть более одного NXT, убедитесь, что тот, который вы используете для вилочных погрузчиков был последним для подключения программное обеспечение LEGO Mindstorms по Bluetooth. Вы можете сделать это, загрузив программу (любой программы), чтобы ваш NXT по Bluetooth.
Закройте программное обеспечение LEGO Mindstorms.Bluetooth автомобиля Удаленный не сможет подключиться к NXT, если программное обеспечение LEGO Mindstorms все еще подключен к нему.
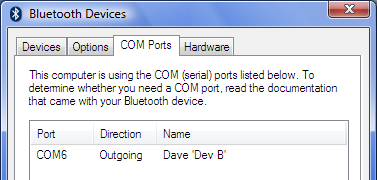
Узнайте, что «СОМ порт» используется для ПК на ссылку NXT. Вы можете сделать это, зайдя в Панель управления на компьютер, работающий на панели управления Bluetooth приложений, и искали информацию о связи с этим. Например, Группа Bluetooth управления на моем компьютере, как показано на рисунке справа, показывает, на вкладке COM-порты, что мой NXT устройство под названием «Дейв» использует COM порт 6 («COM6»).
6. Включите ваш NXT. Вам не нужно любой программы, работающей на NXT для пульта дистанционного управления для работы.
7. Запуск автомобиля Bluetooth удаленного программы (NXT-remote.exe) можно ознакомиться здесь. Эта программа работает на вашем компьютере, а не на NXT.
8. Установить Comport выпадающих в порт определяется в пункте 5 выше.
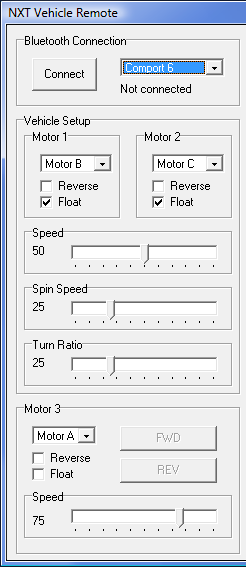
9. Установить контроль, как показано на рисунке справа в качестве отправной точки:
- Двигатель 1 = двигатель B, Float;
- Мотор 2 = C двигателя, Float;
- Скорость = 50;
- Скорость отжима = 25;
- Включите соотношение = 25;
- Двигатель 3 = Двигатель, не Float;
- Двигатель 3 Скорость = 75.
10. Нажмите кнопку Connect установить Bluetooth-соединение с NXT. Если это работает, появится надпись «Connected».
11. С помощью кнопок дисков или клавиатура управления для управления вилочный.
12.Поэкспериментируйте с различными скоростями и настройками, чтобы понять, что вам больше нравится.
Возможные задачи
Попробуйте изменить ForkliftTest программу сделать, чтобы несколько разных задач.
Практика вождения погрузчика с Bluetooth пульт дистанционного управления. Вы можете складывать вещи на полке с 3 разных уровнях и принимать их обратно вниз?
Если у вас есть другие ЛЕГО, попробуйте сделать несколько блоков и других частей, которые могут быть сняты вилочный. Можете ли вы построить башню из частей, которые стек поверх друг друга, и каждый раз, когда вы поднимаете один он поднимает все те, на нем тоже?
Этот дизайн вилочных погрузчиков использует большую часть балки и колышки в комплекте NXT, но если у вас есть некоторые дополнительные детали, вы можете сделать его подъемника еще выше?
Если вы поднимаете тяжелые предметы высоко, вилочных погрузчиков может упасть. Что бы вы могли сделать, чтобы предотвратить это? Как реальный погрузчики делать?
Давайте решим задачку по робота погрузчика. Ответ в комментариях:
Каждый день, прибывший из пункта B в пункт A, робот транспортировщик размещает на своей платформе робота погрузчика и перевозит его назад — в пункт B. Пункты связаны прямой дорогой.
В один из дней робот погрузчик закончил работу в пункте A на 55 минут раньше и для экономии времени выехал своим ходом навстречу роботу транспортировщику. В пункте C роботы встретились, где робот погрузчик въехал на платформу перевозчика и был доставлен в пункт B.
Известно, что в пункт B робот погрузчик попал на 10 минут раньше, чем обычно.
Во сколько раз скорость транспортировщика больше, чем погрузчика.
Задание: необходимо выяснить, во сколько раз скорость транспортировщика больше, чем погрузчика и ввести значение в поле для ввода.







