- Синхронный гистерезисный двигатель
- Конструкция гистерезисного электродвигателя
- Принцип работы синхронного гистерезисного двигателя
- Преимущества и недостатки
- Синхронный реактивно-гистерезисный двигатель
- Конструкция реактивно-гистерезисного электродвигателя
- Принцип работы синхронного реактивно-гистерезисного двигателя
- Преимущества и недостатки
- Серии однофазных реактивно-гистерезисных двигателей
- Гистерезисный двигатель
- Гистерезисный двигатель
Синхронный гистерезисный двигатель
Конструкция гистерезисного электродвигателя
Синхронный гистерезисный электродвигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Статор гистерезисного двигателя имеет обычную трех- или двухфазную обмотку, которая создает вращающееся магнитное поле, а ротор представляет собой массивный цилиндр без обмотки, изготовленный из магнитотвердого материала с широкой петлей гистерезиса (например, сплав викаллой). При этом в целях экономии дорогостоящего магнитотвердого материала ротор делают сборным.
Принцип работы синхронного гистерезисного двигателя
Принцип работы синхронного гистерезисного двигателя основан на действии гистерезисного момента. Для наглядности на рисунке ниже показаны только два элементарных магнитика ns 1 и 2. Сила взаимодействия между этими магнитиками и полем статора NS направлена по оси последнего (рисунок слева). Если поворачивать поле NS, например, против часовой стрелке, то в том же направлении поворачиваются и элементарные магнитики. Однако вследствие магнитного гистерезиса магнитики ns не сразу повернутся на тот же угол, что и поле NS. Между осями NS и ns появится некоторый угол рассогласования γ . Помимо радиальных сил появляются тангенциальные (рисунок справа), которые и создадут гистерезисный момент Мг. Угол γ определяется формой петли гистерезиса материала, из которого изготовлен ротор.

Гистерезисный момент Мг не зависит от частоты вращения ротора. Радикальный способ увеличения вращающего момента гистерезисного двигателя — применение магнитотвердых материалов с прямоугольной петлей гистерезиса. Частота вращения такого двигателя синхронна с частотой вращения поля, КПД высокий — до 80% [2].
Явление магнитного запаздывания заключается в том, что частицы ферромагнитного материала ротора, представляющие собой элементарные магниты, стремятся ориентироваться в соответствии с направлением внешнего магнитного поля. Если внешнее магнитное поле изменит свое направление, то элементарные частицы также меняют ориентацию. Однако повороту элементарных частиц в магнитотвердом материале препятствуют силы молекулярного трения. Этим и объясняется появление угла сдвига γ , значение которого зависит от магнитных свойств материала ротора [3].
Имея массивную конструкцию ротора, гистерезисные двигатели при пуске развивают также асинхронный вращающий момент. Однако этот момент значительно меньше гистерезисного момента, вследствие чего пуск, а также втягивание в синхронизм и работа происходят за счет гистерезисного момента вращения.
Разница между двигателями с постоянными магнитами и гистерезисными состоит в том, что у первых ротор подвергается специальному предварительному намагничиванию, а у вторых намагничивается полем статора двигателя. Гистерезисные двигатели имеют лучшие показатели, чем реактивные, и строятся мощностью до 300. 400 Вт.
Преимущества и недостатки
Достоинствами гистерезисных двигателей являются простота устройства, надежность в эксплуатации, отсутствие пусковых приспособлений, плавность втягивания в синхронизм, практически неизменный ток при пуске и работе. К недостаткам можно отнести относительно высокую стоимость материала ротора, хотя, как правило, ротор изготовляют из обычной стали и на него насаживают лишь полый цилиндр небольшой толщины из магнитотвердого материала.
Синхронный реактивно-гистерезисный двигатель
Самозапускающийся синхронный реактивно-гистерезисный двигатель с редуктором был изобретен в 1916 г. Г.Е. Уорреном (Henry Ellis Warren). Данные электродвигатели выполнялись маломощными и широко применялись до недавнего времени для привода программных и временных механизмов (лентопротяжные механизмы, реле времени, электрические часы и т.п.).
 Реактивно-гистерезисный двигатель
Реактивно-гистерезисный двигатель- Ротор с редуктором электродвигателя Уоррена
 Реактивно-гистерезисный двигатель
Реактивно-гистерезисный двигатель Ротор с редуктором электродвигателя Уоррена
Ротор с редуктором электродвигателя УорренаКонструкция реактивно-гистерезисного электродвигателя
Синхронный реактивно-гистерезисный двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Статор однофазного реактивно-гистерезисного электродвигателя подобен статору однофазного асинхронного электродвигателя с экранированными полюсами и имеет шихтованный двухполюсный сердечник с явно выраженными полюсами. Для упрощения установки однофазной обмотки сердечник статора выполняют разборным, состоящим из двух половин. Полюсы сердечника статора оканчиваются полюсными наконечниками. Каждый полюс разделен на две равные части продольным пазом, на одной из частей расположены короткозамкнутые медные экранирующие витки , обеспечивающие получение в однофазном двигателе вращающегося магнитного поля [2]. Двигатели с экранированными полюсами нереверсивны — ротор всегда вращается только в одну сторону — от неэкранированной части полюса статора к экранированной.

Ротор включает две или более пластин (дисков) толщиной по 0,4 мм из закаленной магнитотвердой стали. Для создания гистерезисного момента выбирается сталь с большим остаточным намагничиванием. Пластины имеют форму колец с перемычками. Магнитное сопротивление ротора в направлении перемычек меньше, и поэтому магнитные проводимости по продольной xd и поперечной осям xq не равны, что обеспечивает получение на роторе еще и реактивного момента. Кольцевой обод на пластинах ротора обеспечивает получение асинхронного и гистерезисного моментов. Ротор закреплен на валу с помощью прорезей в перемычках пластин. Вал электродвигателя связан с редуктором, понижающим частоту вращения и увеличивающим вращающий момент. Ротор с редуктором помещен в герметичный корпус из немагнитного металла.
Принцип работы синхронного реактивно-гистерезисного двигателя
В реактивно-гистерезисном электродвигателе создается три электромагнитных вращающих момента. При пуске двигателя на ротор действуют вихревой и гистерезисный моменты. При этом магнитный гистерезис стального ротора снижает КПД двигателя, но значительно увеличивает пусковой момент. После пуска ротор втягивается в синхронизм и вращается с неизменной синхронной частотой под действием реактивного и гистерезисного моментов.
Преимущества и недостатки
Синхронные реактивно-гистерезисные двигатели Уоренна при сравнительно больших габаритных размерах и массе имеют низкие энергетические показатели (КПД и cosφ). Однако они широко применялись в автоматических устройствах благодаря простоте конструкции, технологичности и возможности работы от однофазного питания.
Серии однофазных реактивно-гистерезисных двигателей
Промышленностью СССР изготавливались однофазные синхронные реактивно-гистерезисные двигатели серий ДСД и ДСДР. Для возможности осуществления реверса в двигателях серии ДСДР на полюсах статора вместо короткозамкнутых витков расположены четыре катушки, по две на каждом полюсе на обеих его половинах. Концы катушек выведены на клеммную колодку. Замыкая ту или иную пару катушек, осуществляется изменение направления вращения электродвигателя. Механическая мощность таких двигателей не превышает 14 мкВт [2].
Гистерезисный двигатель
- Гистерезисный двигатель (ГД) — вид электрических машин, в основе работы которых лежит эффект магнитного гистерезиса. В гистерезисных двигателях вращающий момент возникает за счёт гистерезиса при перемагничивании ротора из магнитотвёрдого материала полем статора.
Гистерезисное преобразование энергии, в отличие от любого другого электромеханического преобразования, является универсальным, то есть синхронно — асинхронным. В асинхронном режиме оно, как и индукционное преобразование, имеет необходимым условием потери скольжения в подвижном элементе. Однако здесь потери скольжения пропорциональны лишь первой степени частоты, а не второй, как при индукционном преобразовании. Этим фактором обусловлены главным образом особенности характеристик гистерезисного преобразователя в асинхронном режиме.
В отличие от магнитоэлектрического преобразования энергии здесь допускается перемещение намагниченности подвижного элемента относительно его геометрических осей (пространственное перемагничивание). Эта особенность не позволяет распространять на синхронный режим общие закономерности магнитоэлектрического преобразования.
По сравнению с электромагнитным преобразованием отличие состоит в том, что проводимости подвижного элемента (ротора) по его геометрическим осям неоднозначны: они зависят от предыстории магнитного состояния ротора.
Совокупность этих особенностей приводит на практике к принципиальным отличиям в характеристиках, алгоритмах и средствах управления, выделяющим гистерезисный электропривод в самостоятельный класс электроприводов.
Гистерезисный двигатель




![]()
![]()
Работа гистерезисного двигателя основана на действии гистерезисного момента. Для объяснения физической сущности возникновения этого момента обратимся к рис. 4.21, где показаны два полюса постоянного магнита (поле статора); между ними расположен цилиндр (ротор) из магнитно-твердого материала. Под действием внешнего магнитного поля ротор намагничивается. На стороне, обращенной к северному полюсу постоянного магнита, возбуждается южный полюс, а на стороне ротора, обращенной к южному полюсу постоянного магнита, – северный полюс. На ротор начинают действовать силы  , направленные радиально к его поверхности (рис. 4.21, а). Если полюсы постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля, и между осью поля ротора и осью внешнего поля появится угол
, направленные радиально к его поверхности (рис. 4.21, а). Если полюсы постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля, и между осью поля ротора и осью внешнего поля появится угол  . Силы , действующие на ротор, изменят свое направление также на угол , а тангенциальные составляющие этих сил
. Силы , действующие на ротор, изменят свое направление также на угол , а тангенциальные составляющие этих сил  создадут гистерезисный момент МГ (рис. 4.21, б).
создадут гистерезисный момент МГ (рис. 4.21, б).
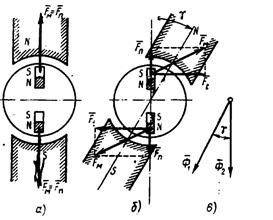
Рис. 4.21. К вопросу о гистерезисном моменте
Явление магнитного запаздывания заключается в том, что частицы ферромагнитного материала (помещенного во внешнее магнитное поле), представляющие собой элементарные магниты, стремятся ориентироваться в соответствии с направлением внешнего поля. Если внешнее поле изменит свое направление, то элементарные частицы меняют свою ориентацию. Однако повороту элементарных частиц препятствуют в магнитно-твердых материалах внутренние силы молекулярного трения. Для изменения направления этих частиц необходима определенная м. д. с., вследствие чего перемагничивание ротора несколько отстает от изменения направления внешнего поля. Это отставание (магнитное запаздывание) характеризуется углом гистерезисного сдвига между вектором магнитного потока ротора  и вектором магнитного потока обмотки статора
и вектором магнитного потока обмотки статора  (рис. 4.21, в). Величина этого угла зависит исключительно от магнитных свойств материала ротора.
(рис. 4.21, в). Величина этого угла зависит исключительно от магнитных свойств материала ротора.
На преодоление сил молекулярного трения расходуется часть подводимой мощности, которая составляет так называемые гистерезисные потери. Величина этих потерь зависит от частоты перемагничивания ротора  , а, следовательно, от скольжения:
, а, следовательно, от скольжения:
 (4.12)
(4.12)
где  – величина гистерезисных потерь при неподвижном роторе (при s=1), т. е. в режиме короткого замыкания.
– величина гистерезисных потерь при неподвижном роторе (при s=1), т. е. в режиме короткого замыкания.
Так как электромагнитная мощность, передаваемая ротору, равна потерям в роторе, деленным на скольжение (см. § 8.8):
 (4.13)
(4.13)
а вращающий момент – электромагнитной мощности, деленной на синхронную угловую скорость:  , то, очевидно, величина гистерезисного момента не зависит от частоты вращения ротора (скольжения). График
, то, очевидно, величина гистерезисного момента не зависит от частоты вращения ротора (скольжения). График  представляет собой прямую, параллельную оси абсцисс (рис. 4.22).
представляет собой прямую, параллельную оси абсцисс (рис. 4.22).
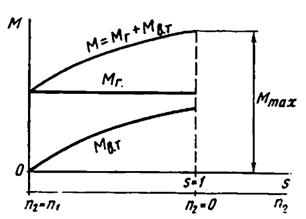
Рис. 4.22. Механические характеристики гистерезисного двигателя
Величина угла гистерезисного сдвига зависит от ширины петли гистерезиса: чем шире петля гистерезиса магнитного материала, тем больше угол гистерезисного сдвига. На рис. 4.23 представлены две петли гистерезиса: обычной стали (кривая 2) и сплава викаллой (кривая 1).

Рис. 4.23. Петля гистерезиса обычной стали и викалоя
Применение обычной стали для изготовления ротора не обеспечивает получение гистерезисного момента достаточной величины. Только магнитно-твердые материалы, такие, как сплавы типа викаллой, дают возможность получить большой гистерезисный момент. Роторы гистерезисных двигателей обычно делают сборными. Магнитно-твердая часть выполняется в виде шихтованного или массивного кольца 1, размещающегося на втулке 2 (рис. 4.24), жестко насаженной на вал 3.
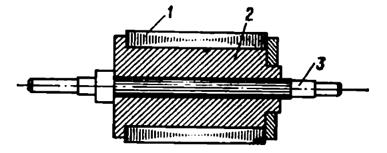
Рис. 4.24. Сборный ротор гистерезисного двигателя
В машинах с нешихтованным (массивным) ротором вращающееся поле статора наводит в роторе вихревые токи. В результате взаимодействия этих токов с полем статора возникает электромагнитный момент МВ.Т, величина которого пропорциональна скольжению:

 (4.13)
(4.13)
где  – потери на вихревые токи в роторе при s = 1, т. е. в режиме короткого замыкания, Вт;
– потери на вихревые токи в роторе при s = 1, т. е. в режиме короткого замыкания, Вт;  – угловая синхронная скорость, рад/с.
– угловая синхронная скорость, рад/с.
Наибольшей величины момент  достигает при неподвижном роторе (s=1), т. е. в момент пуска электродвигателя. Затем, по мере возрастания частоты вращения (уменьшения скольжения), момент
достигает при неподвижном роторе (s=1), т. е. в момент пуска электродвигателя. Затем, по мере возрастания частоты вращения (уменьшения скольжения), момент  убывает (см. рис. 4.21), при синхронной частоте он становится равным нулю.
убывает (см. рис. 4.21), при синхронной частоте он становится равным нулю.
Таким образом, электромагнитный вращающий момент гистерезисного двигателя создается совместным действием двух моментов: от вихревых токов и гистерезисного 
 (4.14)
(4.14)
На рис. 4.21 представлена зависимость результирующего момента гистерезисного электродвигателя от скольжения:  . Характер этой кривой зависит от соотношения
. Характер этой кривой зависит от соотношения  и
и  .
.
Гистерезисный двигатель может работать с синхронной и асинхронной частотами вращения. Однако работа двигателя в асинхронном режиме неэкономична, так как связана со значительными потерями на перемагничивание ротора, величина которых возрастает с увеличением скольжения. Из приведенных на рис. 4.25 рабочих характеристик видно, что при переходе гистерезисного двигателя в асинхронный режим его к. п. д. резко снижается.
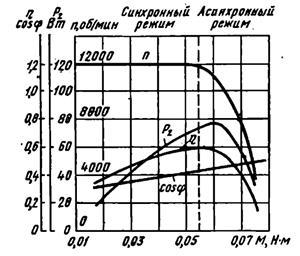
Рис. 4. 25. Рабочие характеристики гистерезисного двигателя
Достоинства гистерезисных двигателей – простота конструкции и надежность в работе, большой пусковой момент, плавность входа в синхронизм, сравнительно высокий к. п. д., бесшумность в работе, малое изменение тока от пуска до номинальной нагрузки  .
.
Недостатки гистерезисных двигателей – низкий коэффициент мощности  и сравнительно высокая стоимость.
и сравнительно высокая стоимость.
Кроме того, гистерезисные двигатели при резких колебаниях нагрузки склонны к качаниям, что создает неравномерности хода (вращения). Объясняется это отсутствием у гистерезисных двигателей пусковой клетки, которая при резких изменениях нагрузки оказывает на ротор успокаивающее (демпфирующее) действие. Наиболее сильные качания наблюдаются у шихтованного ротора, в котором вихревые токи сильно ограничены. Вызываемая качаниями неравномерность вращения ограничивает области применения гистерезисных двигателей.
В СССР гистерезисные двигатели выпускаются серийно на промышленную (50 Гц) и на повышенные (400, 500 Гц) частоты в трехфазном и однофазном исполнениях.
На рис. 4.26 показано устройство гистерезисного двигателя. В корпус 1 запрессован шихтованный сердечник статора 2 с обмоткой 3. Ротор двигателя сборный, он состоит из магнитно-твердого кольца 4, втулки 5 и вала 6. Подшипниковый шит 7 обеспечивает фланцевое крепление двигателя при его установке.
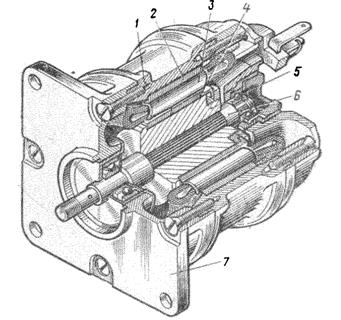
Рис. 4.26. Устройство гистерезисного двигателя







