Анализ Г-образной схемы замещения асинхронного двигателя.
Можно упростить вычисления, преобразовав Т-образную схему замещения в Г-образную, как это показано на рисунке 2, позиции а. Для Г-образной схемы замещения имеем:

 .
.
Г-образная схема замещения асинхронного двигателя.

Рис. 2.
При анализе электромагнитных процессов в машинах общего применения часто полагают С1≈1, что существенно облегчает расчеты и мало влияет на точность полученных результатов. Г-образную схему замещения при С1 = 1 называют упрощенной схемой замещения с вынесенным намагничивающим контуром.
Потери асинхронного двигателя и КПД асинхронного двигателя.
Работа асинхронного двигателя, как и любой другой машины, сопровождается потерями. Потери в конечном итоге, приводят к нагреву двигателя и снижению его КПД.
КПД асинхронного двигателя, представляет собой отношение полезной мощности на выходе P2 к подводимой двигателю мощности P1, выраженная в процентах.
 .
.
Мощность, подводимая к двигателю:

где m – количество фаз, U1 – напряжение на статорной обмотке, I1 – ток в статорной обмотке, cosφ1 – коэффициент мощности двигателя.
Полезная мощность на выходе P2, меньше подводимой мощности P1 на величину суммарных потерь ∑P

Потери ∑P складываются из магнитных, электрических и механических потерь.
В первую очередь часть подводимой мощности P1 расходуется на покрытие магнитных Pм1 и электрических Pэ1 потерь в статоре.
Электрические потери в статоре.

Где r1 активное сопротивление обмотки статора.
Магнитные потери в статоре приблизительно определяются как

где f1 – частота тока перемагничивания, которая равна частоте тока в сети. V = 1.3-1.5. Магнитные потери в роторе малы настолько, что ими при практических расчетах пренебрегают. Это связано с малой частотой перемагничивания ротора.
Мощность, оставшаяся после восполнения потерь в статоре, называется электромагнитной и равна

Электромагнитная мощность передается ротору с помощью магнитного поля, через воздушный зазор δ. Часть электромагнитной мощности затрачивается на электрические потери в роторе, которые пропорциональны скольжению

Отсюда можно получить выражение для скольжения

Не трудно заметить, что с увеличением скольжения электрические потери в роторе также увеличиваются, а это в свою очередь вызывает уменьшение КПД.
В асинхронных двигателях с фазным ротором, присутствуют потери в щеточном узле, которые обычно добавляют к электрическим потерям в роторе

Где I2 – ток ротора, Uщ – падение напряжения на пару щеток
Оставшаяся мощность называется механической
Г-образная схема замещения




![]()
![]()
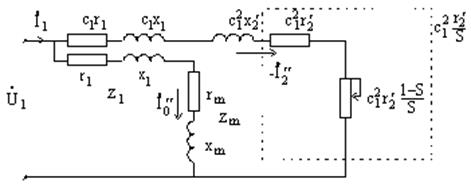
В Г-образной схеме рабочая ветвь и цепь намагничивания независимы, а сопротивления активные и индуктивные можно просуммировать.
В Г-образной схеме замещения
 ,
,
где  — комплексное число
— комплексное число
Ток I1, не должен изменяться, тогда исходя из Т-образной схемы
а, в Г-образной схеме ток
после преобразования получим
 ,
,
поэтому параметры статорной обмотки должны умножить на коэффициент С1, а параметры роторной обмотки на  (см. Г-образную схему). Покажем связь между током в роторе
(см. Г-образную схему). Покажем связь между током в роторе  (Т-образной схемы замещения) с током
(Т-образной схемы замещения) с током  (Г-образной схемы замещения).
(Г-образной схемы замещения).
Из Т-образной схемы ток
 ,
,
если подставить выражение тока  и преобразуем это выражение, тогда получим
и преобразуем это выражение, тогда получим
 ,
,
тогда отношение токов

равно комплексному коэффициенту С1.
т.е. С1 представляет собою отношение напряжения приложенного к двигателю  к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
Реально в машинах r1 и x1
 2.10 Вращающий (электромагнитный) момент асинхронной машины
2.10 Вращающий (электромагнитный) момент асинхронной машины
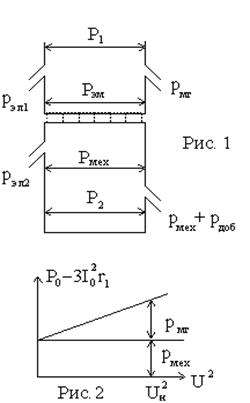
Для вывода формулы этого момента предварительно рассмотрим энергетическую диаграмму асинхронного двигателя (рис.1).
1. Активная потребляемая мощность из сети

2. В статоре имеются потери в обмотках

и магнитные потери Рмг, которые определяются из опыта холостого хода (см. рис.2).
3. Рэм – электромагнитная мощность
 ,
,
она электромагнитным путем передается на ротор. В роторе потерями в стали пренебрегаем, т.к. f = (2 — 3)Гц.
4. Потери в обмотке ротора Рэл2 определим ниже. pмех – механические потери определяем из рис.2. Рдоб – добавочные потери принимаются равными 0,5% от Р1. Рмех — полная механическая мощность.

Мощность на валу

КПД — 
М — электромагнитный момент, создаваемый в результате взаимодействия вращающего магнитного поля с током в роторе (предварительное определение). Электромагнитный момент двигателя должен уравновесить момент на валу – М2 и момент холостого хода М = М2 + М0 .
Выразим электромагнитную и полную механическую мощность через электромагнитный момент.
где w1 — угловая скорость поля статора.
где w — угловая скорость ротора.
Потери в обмотке ротора

итак  .
.
Потери в меди (алюминии) обмотки ротора зависят от электромагнитной мощности и скольжения и прямо от параметров не зависят. Для уменьшения этих потерь номинальное скольжение должно быть как можно меньше.
Исходя из этого выражения, получим формулу электромагнитного момента
 , откуда
, откуда  (1).
(1).
Используя Г-образную схему замещения получим
 (2)
(2)
Подставив уравнение (2) в уравнение (1) получим
если  , тогда
, тогда
 . Зависимость M = f(S)
. Зависимость M = f(S)
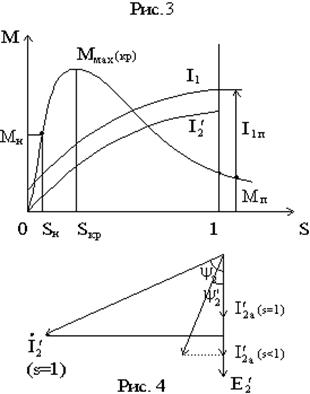 Зависимость электромагнитного момента от скольжения называется механической характеристикой. Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от U 2 квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%. При постоянных параметрах схемы замещения зависимость М электромагнитного момента от скольжения представлена на рис.3.
Зависимость электромагнитного момента от скольжения называется механической характеристикой. Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от U 2 квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%. При постоянных параметрах схемы замещения зависимость М электромагнитного момента от скольжения представлена на рис.3.
Пояснение зависимости M = f(S).
Область от S = 0 ¸ Sкр
При малом скольжении X2S » 0, тогда ток в роторе  активному току, с увеличением S
активному току, с увеличением S 
 M
M
Момент зависит от потока и активной составляющей тока в роторе

В области Mmax начинает проявляться индуктивное сопротивление X2S.
Область скольжений S = Sкр ¸ 1
В этой области с увеличением скольжения S увеличивается индуктивное сопротивление ротора X2S = X2×S за счет которого увеличивается угол y2 между ЭДС  и током (см. рис. 4), активная составляющая при этом уменьшается, а следовательно уменьшается и момент, т.е. S X2S
и током (см. рис. 4), активная составляющая при этом уменьшается, а следовательно уменьшается и момент, т.е. S X2S 
 M¯
M¯
На рис.3 ток, при S = 1 равен пусковому, который в 5¸7 раз больше номинального. При S = 0 ток I1 ¹ 0, т.к. при S = 0 двигателем потребляется реактивная мощность для создания вращающего поля, кроме того, двигателем потребляется активная мощность на покрытие потерь в статоре.

При S = 0 ток ротора  , т.к.
, т.к. 
Кривая зависимости M = f(S) характеризуется тремя моментами:
а) Пусковой момент Мп при S = 1
б) Максимальный момент Мmax ® Sкр
в) Номинальный момент МН ® SН
Отношение максимального (критического) момента к номинальному, называется перегрузочной способностью







